Кинематическое исследование механизмов методом графиков
Определение ускорений точек механизма методом планов ускорений
При помощи планов ускорений можно найти ускорения любых точек механизма. Для построения планов ускорений по аналогии с планами скоростей следует пользоваться их свойствами. Свойства такие же, как и у планов скоростей (см. п. 2.3), кроме третьего, где фигура, подобная одноименной жесткой фигуре на плане положений механизма, повернута на угол (  ) в сторону мгновенного ускорения
) в сторону мгновенного ускорения  данного звена:
данного звена:
 . (2.20)
. (2.20)
Поскольку полные относительные ускорения состоят из геометрической суммы тангенциальных и нормальных составляющих, то концы векторов абсолютных ускорений обозначают буквами, соответствующими названию точек.
Определение ускорений рассмотрим также на примере механизма, представленного на рис. 2.2, а.
Пример 4: методом планов ускорений определить абсолютные и относительные ускорения точек звеньев и угловые ускорения звеньев механизма. Данные взять из примера 1.
Считая известными ускорения шарнирных точек (  =
=  = 0), помещаем их на плане ускорений в полюсе
= 0), помещаем их на плане ускорений в полюсе  . Звено О1А вращается равномерно, поэтому точка А имеет только нормальное ускорение
. Звено О1А вращается равномерно, поэтому точка А имеет только нормальное ускорение  , которое направлено по звену О1А к центру вращения О1 (см. рис. 2.2, в). Определяем его по формуле:
, которое направлено по звену О1А к центру вращения О1 (см. рис. 2.2, в). Определяем его по формуле:
 ; (2.21)
; (2.21)
|
|
|
 м/с2.
м/с2.
Принимаем (произвольно) длину отрезка  , изображающего вектор ускорения
, изображающего вектор ускорения  точки А, равно 98,596 мм. Тогда масштаб плана ускорений, м/с2·мм-1:
точки А, равно 98,596 мм. Тогда масштаб плана ускорений, м/с2·мм-1:
 ; (2.22)
; (2.22)
 .
.
Из полюса плана Ра откладываем параллельно звену О1А в направлении от А к О1.
Рассматривая движения точки В со звеном АВ, составляем векторное уравнение:
 . (2.23)
. (2.23)
В этом уравнении ускорение точки А известно по величине и по направлению. Определяем нормальное ускорение точки В относительно А:
 ; (2.24)
; (2.24)
 м/с2.
м/с2.
На плане ускорений  можно выразить отрезком
можно выразить отрезком  мм и отложить его параллельно звену АВ на плане из точки а в направлении от В к А (а1n1), а затем из точки n1 перпендикулярно звену АВ провести линию действия тангенциального ускорения до пересечения с линией хода ползуна (это и будет точка b).
мм и отложить его параллельно звену АВ на плане из точки а в направлении от В к А (а1n1), а затем из точки n1 перпендикулярно звену АВ провести линию действия тангенциального ускорения до пересечения с линией хода ползуна (это и будет точка b).
Определяем ускорения точки В, м/с2:
|
|
|
 ; (2.25)
; (2.25)
 ;
;
 ; (2.26)
; (2.26)
 ;
;
 ; (2.27)
; (2.27)
 .
.
Положение точки С на плане ускорений находим по свойству подобия (из пропорции):
 ;
;  . (2.28)
. (2.28)
Соединив ее с полюсом, определяем ускорение точки С, м/с2:
 ; (2.29)
; (2.29)
 .
.
Для определения ускорения точки D рассматриваем движения точки D со звеньями CD и DO2. Составляем векторные уравнения:
 ; (2.30)
; (2.30)
 . (2.31)
. (2.31)
Определяем нормальные ускорения (ускорение точки С известно по величине и по направлению, а ускорение  = 0), м/с2:
= 0), м/с2:
 ; (2.32)
; (2.32)
|
|
|
 ;
;
 ; (2.33)
; (2.33)
 .
.
От точки С плана ускорений параллельно звену DC в направлении от точки С к точке D откладываем вектор  , изображающий ускорение
, изображающий ускорение  , длина которого
, длина которого
 ; (2.34)
; (2.34)
 мм.
мм.
Из точки О2 плана ускорений (из полюса Ра) параллельно звену DO2 в направлении от D к О2 откладываем вектор  , изображающий ускорение
, изображающий ускорение  , величина которого
, величина которого
 ; (2.35)
; (2.35)
 мм.
мм.
Через точку n2 проводим перпендикулярно звену CD линию действия тангенциального ускорения  до пересечения с линией действия
до пересечения с линией действия  , проведенной из точки n3 перпендикулярно звену О2D. На их пересечении получится точка d – конец вектора
, проведенной из точки n3 перпендикулярно звену О2D. На их пересечении получится точка d – конец вектора  , изображающего ускорение аD точки D механизма:
, изображающего ускорение аD точки D механизма:
 ; (2.36)
; (2.36)
 м/с2.
м/с2.
Определяем тангенциальные и относительные во вращении вокруг точек С и О2 ускорения, м/с2:
|
|
|
 ; (2.37)
; (2.37)
 ;
;
 ; (2.38)
; (2.38)
 ;
;
 ; (2.39)
; (2.39)
 ;
;
 ; (2.40)
; (2.40)
 .
.
Из третьего свойства планов ускорений (свойства подобия) определяем места положений точек центров тяжести, а затем величины ускорений:
 ; (2.41)
; (2.41)
 ;
;
 ; (2.42)
; (2.42)
 ;
;
 ; (2.43)
; (2.43)
 ;
;
 ; (2.44)
; (2.44)
 ;
;
 ; (2.45)
; (2.45)
 .
.
Определяем угловые ускорения звеньев. Угловое ускорение ε1 ведущего звена О1А, совершающего равномерное движение, равно нулю. Угловое ускорение звена 2
 ; (2.46)
; (2.46)
 с-2.
с-2.
|
|
|
|

Для определения направления углового ускорения ε2 звена 2 надо мысленно перенести вектор  тангенциального ускорения
тангенциального ускорения  в точку В. В направлении этого вектора точка В вращается относительно точки А против часовой стрелки (рис. 2.3).
в точку В. В направлении этого вектора точка В вращается относительно точки А против часовой стрелки (рис. 2.3).
Рис. 2.3
По аналогии определяем значения и направления угловых ускорений звеньев 4 и 5, с-2:
 ; (2.47)
; (2.47)
 (против часовой стрелки);
(против часовой стрелки);
 ; (2.48)
; (2.48)
 (по часовой стрелке).
(по часовой стрелке).
Примечание. При выполнении анализа механизма полученные значения линейных и угловых ускорений и скоростей всех точек механизма рекомендуется свести в таблицу.
Кинематическое исследование механизмов методом графиков
(кинематических диаграмм)
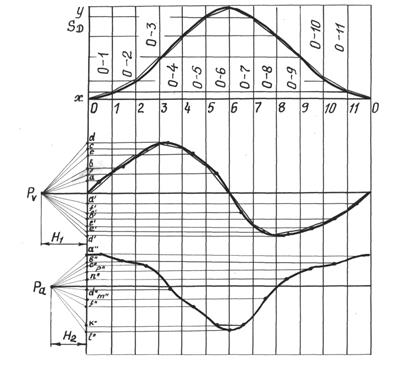
Для того чтобы построить наглядное представление о характере движения какой-либо точки механизма, строят кинематические диаграммы перемещений, скоростей и ускорений этой точки. Кинематические диаграммы представляют собой графические зависимости перемещений S = f(t), скорости V = f ́(t) и ускорений а = f ́ ́(t) исследуемой точки от времени поворота ведущего звена или S = f(φ1), V = f ́(φ1) и а = f ́ ́(φ1) от угла поворота φ1 ведущего звена. Их построение производится после построения совмещенного плана положений механизма.
Рассмотрим это на примере.
Пример: для механизма (см. рис. 2.3) построить график перемещения точки В и, дифференцируя его методом хорд, построить график скоростей этой точки, а дифференцируя график скоростей, построить график ускорений. Частота вращения ведущего звена О1А n1 = 150 об/мин. Угловая скорость ведущего звена
 ; (2.49)
; (2.49)
 с-1.
с-1.
В прямоугольной системе координат Х и Y откладываем по оси ординат перемещения точки В, по оси абсцисс – время одного цикла движения механизма отрезком 0 – 0. При длительности цикла, с,
 ; (2.50)
; (2.50)

и длине отрезка 0 – 0, равной 120 мм, масштаб времени по оси абсцисс, с·мм-1,
 ; (2.51)
; (2.51)
Разбив отрезок 0 – 0 на 12 равных частей, из точек деления восстанавливаем перпендикуляры к оси абсцисс.
На оси ординат откладываем отрезки перемещений SB точки В в масштабе kS = k1 = 0,008 м/мм, то есть измеряем перемещения точки В на совмещенном плане положений механизма и переносим их на ось ординат без изменения (перемещения можно увеличить или уменьшить, чтобы получить желаемую высоту (ординату) диаграммы). Из точек разметки оси ординат 1, 2,…, 11 проведем прямые, параллельные оси абсцисс, до пересечения с соответствующими перпендикулярами. Соединив точки пересечения плавной линией, получим диаграмму перемещений точки В механизма.
Графически дифференцируя диаграмму перемещений, строим диаграмму скоростей точки В. Для этого проведем хорды кривой на соответствующих участках разметки (0 – 1; 1 – 2; 2 – 3 и т. д.) и обозначим их a, b, c,…,c ́, b ́, а ́. В системе координат ХОY продолжаем ось абсцисс влево и на произвольно выбранном расстоянии Н1 обозначаем полюс РV. В примере Н1 = 30 мм. Из полюса РV проводим лучи, параллельные этим хордам, до пересечения с осью ординат y.
Из точек пересечения лучей a, b, c,…,c ́, b ́, а ́ с осью у проводим прямые, параллельные оси абсцисс, до середины между вертикалями. Соединив точки плавной кривой, получаем диаграмму скоростей точки В механизма.
Графически дифференцируя диаграмму скоростей, получаем диаграмму ускорений точки В. Полюсное расстояние Н2 принимаем равным 20 мм.
Масштабы кинематических диаграмм:
- угла поворота
 ; (2.52)
; (2.52)
 рад/мм;
рад/мм;
- времени
 ; (2.53)
; (2.53)
 с/мм.
с/мм.
- перемещений
kS = k1; (2.54)
kS = 0,008 м/мм;
- скоростей
 ; (2.55)
; (2.55)
 м/с·мм-1;
м/с·мм-1;
- ускорений
 ; (2.56)
; (2.56)
 м/с2·мм-1.
м/с2·мм-1.
По построенным диаграммам можно наглядно проследить за характером изменений кинематических параметров за полный цикл работы механизма и получить значения перемещений, скоростей и ускорений точки В через любой промежуток времени.
Дата добавления: 2020-11-27; просмотров: 52; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!