Способы регулирования скорости вращения ДПТ с ПВ
ЛАБОРАТОРНАЯ РАБОТА № 13
Изучение основных характеристик электродвигателя
Постоянного тока
1. ЦЕЛЬ РАБОТЫ
Ознакомиться с назначением, устройством и принципом действия
электродвигателей постоянного тока.
Изучить основные характеристики и режимы работы двигателя постоянного
тока с последовательным возбуждением (ДПТ с ПВ)
2. ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ.
Назначение, устройство и принцип действия ДТП
Электродвигатели постоянного тока - электрическая машина, предназначенная для преобразования электрической энергии постоянного тока в механическую.
Электродвигатели постоянного тока в конструктивном отношении не отличаются от генераторов постоянного тока. Машины постоянного тока обратимы и могут работать как в генераторном, так и в двигательном режиме.
Двигатели постоянного тока (ДПТ) обладают важными преимуществами перед другими электродвигателями: они позволяют плавно и глубоко регулировать скорость вращения ротора (якоря) и создают большой пусковой момент, что определяет их широкое использование в качестве тяговых двигателей на электрифицированном транспорте, в лифтах, приводах тельферов и других подъемно-транспортных механизмах.
Особенностью ДПТ с ПВ являются необходимость обеспечения определенного момента со противления на валу, т.е. недопустимость работы в режиме холостого хода т.к. при этом двигатель идет в разнос.
|
|
|
Машина постоянного тока (рис. 1) имеет неподвижную часть-статор 1 и расположенные на нем главные 2 и дополнительные 3 полюса с обмотками возбуждения 4 и 5.
Подвижной частью машины является цилиндрический ротор (якорь) 6, набранный из изолированных друг от друга листов электрической стали для уменьшения потерь мощности в магнитопроводе якоря. В пазах якоря размещается обмотка якоря 7, выводы которой соединяются с пластинками коллектора 8, монтируемого на валу машины.
Как отмечалось выше, МПТ могут работать в режиме генератора или двигателя. Для работы МПТ в режиме двигателя необходимо от внешнего источника постоянного тока подать 
напряжение на щетки машины и обмотку возбуждения. При этом в обмотках возбуждения и якоря возникает электрический ток В результате взаимодействия тока якоря с магнитным потоком, создаваемым обмоткой возбуждения в магнитопроводе статора, возникает электромагнитный момент ДПТ, под действием которого якорь приходит во вращение. При этом электромагнитный момент, развиваемый ДПТ
полюсов электродвигателя; Ф - магнитный поток одной пары полюсов ДПТ; IЯ -ток якоря двигателя.
|
|
|
При вращении якоря в его обмотке возникает э. д. с. индукции, направленная навстречу току и приложенному напряжению питания. Поэтому э.д.с. якоря обычно называют противо - э. д. с. и она равна
E = C Фω
где ω - угловая скорость или частота вращения якоря ДПТ, рад/с; Се -коэффициент, зависящий от конструктивных элементов машины; Ф-магнитный поток одной пары главных полюсов ДПТ.
В зависимости от способа электромагнитного возбуждения ДПТ подразделяется на двигатели с независимым, параллельным, последовательным и смешанным возбуждением. У двигателей с независимым возбуждением обмотка возбуждения (ОВ) питается от независимого источника постоянного тока (рис. 2)
У двигателей с параллельным возбуждением ОВ рассчитана на полное напряжение питания и включается параллельно цепи якоря (рис.3).
Рис. 2. ДТП с независимым возбуждением Рис. 3. ДТП с параллельным возбуждением
Двигатель с последовательным возбуждением имеют ОВ, которая включается последовательно с якорем, поэтому она рассчитана на полный ток якоря (рис.4).
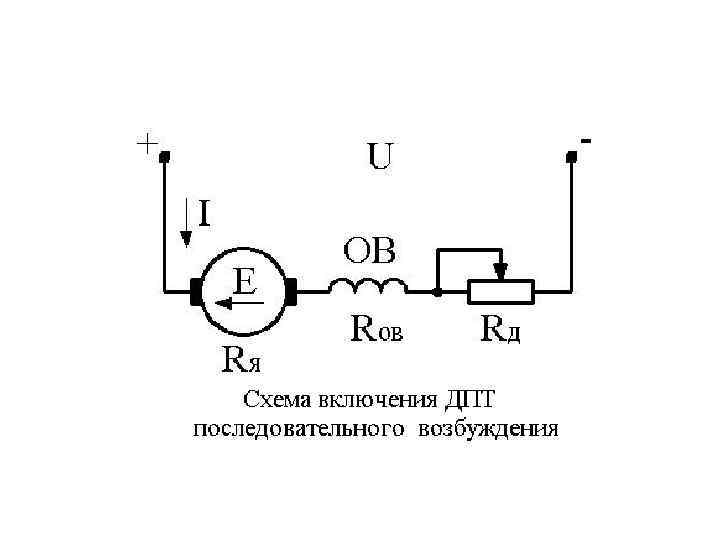
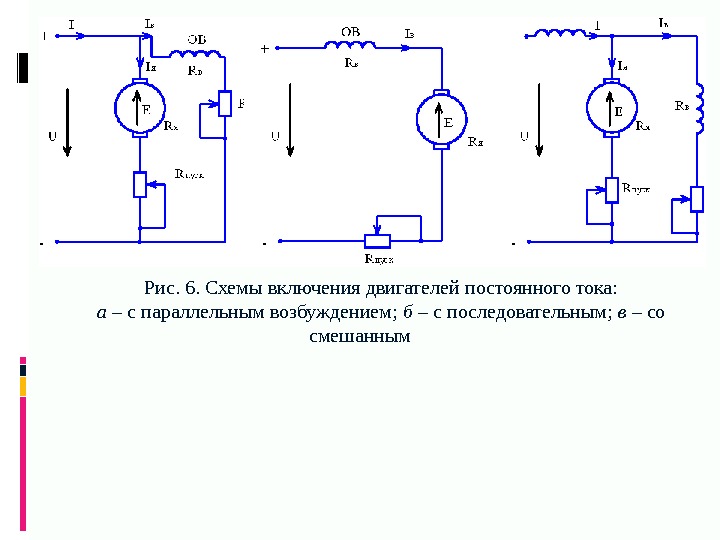
| Рис 4. ДПТ с последовательным возбуждением | Рис.5. ДПТ со смешанным возбуждением |
|
|
|
Двигатели со смешанным возбуждением имеют две обмотки, одна ОВ2 включается параллельно, другая ОВ1 - последовательное с якорем (рис.5). В данной лабораторной работе исследуются ДПТ с последовательным возбуждением (ПВ). Например, ДПТ с ПВ трамвайных вагонов имеют мощность 40...45 кВт, напряжение 550 В, двигатели электровозов имеют мощность 450...550 кВт, напряжение 3 кВ.
При пуске ДПТ (независимо от способа возбуждения) путем прямого включения в питающую сеть возникают большие пусковые токи (в 10...30 раз больше нормального), которые могут привести к выходу их из строя. Это происходит в результате выделения значительного количества теплоты в обмотке якоря и последующего нарушением ее изоляции. Поэтому пуск ДПТ производится специальными пусковыми реостатами Rп. Сопротивление Rп выбирается таким, чтобы пусковой ток не превышал кратковременного
допустимого значения (2...2,5) IН (IН - номинальный ток двигателя). Время пуска ДПТ составляет доли секунд. Таким образом, пусковое сопротивление в цепи якоря необходимо только при пуске. В процессе нормальной работы электродвигателя Rп должно быть отключено, т.е. R п =0.
Поэтому для ДПТ с ПВ в соответствии со вторым законом Кирхгофа (см. рис. 4) уравнение электрического сопротивления имеет вид
|
|
|
U = E + IЯ (RЯ + RB ) ,
где RЯ и RB сопротивление якоря и ОВ.
С учетом того, что е E = c Ф ω, уравнение частотной характеристики ДПТ с ПВ приводится к следующему виду:
( ) ( ) Я B Я Я B
Я
E E EIа
U R R I U R RIIа –
С Ф C Ф C Ф
− + +
ω = = −
Из формулы следует, что при отсутствии нагрузки на валу и токе якоря IЯ=0 частота вращения ДПТ при данном значении питающего напряжения 0 ,
e
U
C Ф
ω= =ω
где ω0 является частотой вращения идеального холостого хода
Частотные ω, рад/с (скоростные n=60/2πω, об/мин), характеристики ДПТ
ω=f(IЯ) при U=UH=const имеют вид (рис. 6) и их называют естественными
частотными характеристиками ДПТ, так как RП=0 и RP=0 и Ф=ФН, зависимость
ω=F(M) - называют механической характеристикой ДПТ.
Выражая в уравнениях частотных характеристик ток IЯ через
электромагнитный момент двигателя М= СЕФIЯ, получим для ДПТ с ПВ
2 0 2
( Я B ) ( )
Я B
e E M E M
U R R M M R R
CФ С
Частотные ω, рад/с (скоростные n=60/2πω, об/мин), характеристики ДПТ ω=f(IЯ) при U=UH=const имеют вид (рис. 6) и их называют естественными частотными характеристиками ДПТ, так как RП=0 и RP=0 и Ф=ФН, зависимость ω=F(M) - называют механической характеристикой ДПТ.
Выражая в уравнениях частотных характеристик ток IЯ через электромагнитный момент двигателя М= СЕФIЯ, получим для ДПТ с ПВ
Рис. 6. Частотные естественные характеристики ДПТ
Для ДПТ с параллельным возбуждением (шунтовых) естественная механическая характеристика (прямая 1, рис. 6) называется "жесткой".
Для ДПТ с ПВ и изменением IЯ, М (т.е. от его нагрузки МС) меняется и магнитный поток, поэтому естественная механическая характеристика будет "мягкой" и имеет вид, представленный на рис. 6 (зависимость 2). Благодаря наличию двух обмоток возбуждения (см. рис 5) свойства ДПТ со смешанным возбуждением представляет собой нечто среднее между свойствами ДПТ с параллельным и последовательным возбуждением. Поэтому
механическая характеристика, представленная на рис. 6, имеет вид (зависимость 3).
Способы регулирования скорости вращения ДПТ с ПВ
При использовании электропривода часто технологический процесс требует изменение частоты угловой скорости вращения электродвигателя при неизменной нагрузке на валу ротора (MС=const). Такое регулирование угловой скорости вращения ω, как видно из выражения механической характеристики ω=F(M), можно осуществить изменением U, RP, Ф. Надо помнить, что эти характеристики будут называться искусственными механическими характеристиками (в отличии от естественных характеристик, рассмотренных выше) и, кроме того, изменение вследствие колебания нагрузки не входит понятие регулирования ω.
Регулирование скорости вращения ДПТ с ПВ изменением питающего напряжения можно представить с помощью семейства механических характеристик, изображенных на рис. 7.
| Рис. 7. Семейство механических характеристик ДПТ С ПВ при UН >U1 >U2 >U3 | Рис. 8. Семейство механических характеристик ДПТ с ПВ при RP1< RP2< RP3 |
При этом величина напряжения питания регулируется, как правило, при
помощи теристорных преобразователей напряжения или систем "генератор-двигатель".
Семейство механических характеристик ДПТ с ПВ при различных значениях регулирующего сопротивления RP представлено на рис. 8. И в этом случае также осуществляется регулирование ω вниз от основной скорости.
Регулирование целесообразно проводить при постоянном моменте сопротивления Мс. Этот способ нашел достаточно широкое применение в крановых и тяговых ДПТ с ПВ.
Регулирование угловой скорости вращения изменением величины потока возбуждения выполняется шунтированием обмотки возбуждения дополнительным реостатом RШ, изменение положения которого влияет на ток возбуждения. Регулирование осуществляется в этом случае вверх от основной скорости вращения.
Дата добавления: 2020-11-27; просмотров: 259; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!