Интегрированная система судна и место в ней ИСМ
Интегрированная система судна
1.1 Интегрированная система
1.2 Интегрированная система судна и место в ней ИСМ
Интегрированная система ходового мостика
2.1 Состав интегрированных систем ходового мостика
2.2 Требования к ИСМ
Навигационно-информационная система
3.1 Назначение системы 3.2 Состав системы 3.3 Виды ЭК и типы навигационно-информационных систем 3.4 Краткие сведения об ECDIS
Список использованной литературы
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
АИС – автоматическая идентификационная система; АР – авторулевой; БД – база данных; БЗ – база знаний; ГДУ – главная движительная установка; ГК – гирокомпас; ГЛОНАСС – глобальная навигационная спутниковая система; ДП – диаметральная плоскость; ЖК – жидкокристаллические; ИИЭР – Институт инженеров по электротехнике и радиоэлектронике; ИМО – Международная морская организация; ИС – интегрированная система; ИСМ – интегрированная система ходового мостика; ИСС – интегрированная система судна; ИСУ – интегрированная система управления; КВ – короткие радиоволны; МАМС – Международная ассоциация маячных служб; МГО – Международная гидрографическая организация; МИО – морской информационный объект; МППСС – международные правила предупреждения столкновения судов; МЭК – Международная электротехническая комиссия; НАВТЕКС – навигационный телекс; НИС – навигационно-информационная система; НКД – неподвижный круг дальности; ПВ – промежуточные радиоволны; ПИ – приемоиндикатор; ПК – персональный компьютер; ПКД – подвижный круг дальности; РГВ – расширенный групповой вызов; РДР – регистратор данных рейса; РЛС – радиолокационная станция; САВТ – система автоматического вождения судна по заданной траектории; САРП – средства автоматической радиолокационной прокладки; САС – средства автосопровождения; СМН – система мониторинга нагрузок на корпусе; СМПВ – система мониторинга параметров волнения; СМТ – средства микропроцессорной техники; СНВ – система ночного видения; СНС – спутниковая навигационная система; СОК – система обеспечения качества; СОМ – система оценки мореходности; СПЗ – система приема звуковых сигналов; СПП – система планирования пути; СППР – система поддержки принятия решений; СПС – система предупреждения столкновений; СУ – система управления; СУД – станция управления движением; СУДС – береговая система управления движением судов; СЭП – средства электронной прокладки; ТС – технические средства; УКВ – ультракороткие волны; ЦИВ – цифровой избирательный вызов; ЦСМ – централизованная система мониторинга и сигнализации; ЭДЦ – элементы движения цели; ЭК – электронные карты. GMDSS - Global Maritime Distress and Safety System; GNSS – Global Navigation Satellite System; GPS – Global Position System; ECDIS - Electronic Chart Display and Information System; ECS - Electronic Chart System; ENC - Electronic navigation chart; LAN - Local area net; ОМВО - One man bridge operations; RCDS - Raster Chart Display System; SAR – Search and rescue.
|
|
|
|
|
|
|
|
|
|
|
|
Интегрированная система судна
Интегрированные системы
Понятие интегрированной системы. Под интеграцией систем понимается целенаправленное объединение их программных и аппаратных средств в целостную систему, реализующую заданную функцию и удовлетворяющую предусмотренным требованиям. Интегрированная система (ИС) состоит из нескольких частей, причем целью объединение этих частей является выполнение новой задачи, для решения которой требуется использовать функции объединяемых частей. При построении современных ИС применяется системный подход. Основной общий принцип этого подхода заключается в рассмотрении частей системы с учётом их взаимодействия. Системный подход включает в себя выявление структуры системы, типизацию связей, определение атрибутов, анализ влияния внешней среды. Применительно к процессу судовождения системный подход состоит в учете всех особенностей этого процесса, всех существенных связей между различными частями системы вождения судна, между ней и внешней средой, между системой и оператором с целью достижения максимальной эффективности в решении задач судовождения. Эффективность интегрированной системы определяется не только качеством разработки и реализации каждого ее уровня, но и оптимальностью их взаимодействия. Интегрированные системы именуют также комплексными системами. Конфигурация ИС – это совокупность из определенного числа частей, образующих интегрированную систему той или иной мощности. Под мощностью ИС понимается характеристика объема решаемых системой задач. Минимальный комплект интегрированной системы, при котором она еще отвечает своим основным целям, называется ее базовой конфигурацией. Совокупность частей интегрированной системы, участвующих в данный момент при решении задач, называют используемой конфигурацией ИС. Открытость интегрированных систем. Интеграция систем является одним из основных механизмов повышения уровня автоматизации различного рода процессов. Чтобы обеспечить совершенство этого механизма, к ИС предъявляются определенные требования. Пожалуй, самым важным требованием к интегрированным системам является обеспечение их открытости. Она состоит в том, что должна быть возможность подключения к системе дополнительного оборудования и организации его работы в составе ИС. Это требование определяет способность ИС к расширению функций, к модернизации, к дальнейшей автоматизации процессов в той или в другой предметной области. Открытость систем в настоящее время обеспечивается использованием единой дискретной основы построения аппаратуры, стандартизацией оборудования, применением магистрально-модульного и модульно- иерархического принципа формирования структуры и рядом других мер. Единая дискретная основа означает, что все отдельные части ИС должны управляться микропроцессорной техникой, преобразовывать данные и выдавать их в цифровой форме. Такое построение аппаратуры позволяет более просто и надежно организовывать информационное взаимодействие между частями системы, а также между системой и другим оборудованием. Когда все части имеют микропроцессорную основу, то для образования ИС они объединяются в сеть с помощью информационного канала и специального программного обеспечения и взаимодействуют в соответствии с определенным протоколом. Стандартизация оборудования направлена на обеспечение требуемых эксплуатационных, технических характеристик ИС и совместимости различного вида входящей в ИС аппаратуры, выпускаемой различными фирмами и организациями. Различают конструктивную, информационную и энергетическую совместимость аппаратуры. Конструктивная совместимость предполагает согласованность конструктивных параметров частей ИС, позволяющая соединять функциональные устройства в единое конструктивное целое. Информационная совместимость определяется условиями для единообразной передачи сообщений между частями системы. Энергетическая совместимость состоит в обеспечении, по возможности, одинакового электропитания объединяемых частей. Касаясь интегрированных систем ходового мостика, необходимо отметить следующее. Минимальные эксплуатационные требования к морским навигационным приборам и системам определяются Международной морской организацией - ИМО (IMO - International Maritime Organization). На основе эксплуатационных требований Международная электротехническая комиссия вырабатывает технические стандарты к электрическому и электронному оборудованию. МЭК также определяет протоколы взаимодействия входящих в ИСМ устройств. Отдельные части ИСМ должны удовлетворять и касающихся их требованиям других международных организаций. Например, необходимо, чтобы система с электронными картами ECDIS отвечала стандартам Международной гидрографической организации – МГО (IHO – International Hydrographic Organization). Бортовая аппаратура автоматической идентификационной системы должна соответствовать требованиям Международного телекоммуникационного союза (ITU – International Telecommunication Union). Создание интегрированных систем базируется на международных стандартах, определяющих, как должны работать друг с другом компоненты этих систем. Во всех странах стандарты информационного взаимодействия называются протоколами. Протокол в информационной системе – это документ, четко определяющий процедуры и правила взаимодействия входящих и подключаемых к системе устройств. Протоколом устанавливается список команд, которыми могут обмениваться устройства, порядок передачи команд, правила взаимной проверки работы, размеры передаваемых блоков информации и т.д. Протоколы создаются для того, чтобы изготавливаемые разными объединениями и фирмами устройства могли работать друг с другом. Стандарты взаимодействия (интерфейса) навигационной аппаратуры изложены в протоколе МЭК 61162. Этот документ совпадает по содержанию с протоколом NMEA–0183 национальной морской электронной ассоциации США (NMEA – National Maritime Electronic Association). Условия стандарта на интерфейс включают: –вид и количество сигналов, –систему кодирования, –название и действие управляющих сигналов, –значения напряжения для сигналов «0» и «1», –тип соединительного элемента (штекерный разъем, пайка и т.п.), –распределение сигналов в соединительном элементе и др. Модульность состоит в построении аппаратуры и/или программного обеспечения из отдельных, в определенной мере автономных структур (модулей, блоков, подсистем), которые могут функционировать как отдельно при выполнении своих локальных задач, так и совместно при решении общей задачи. Модульное построение облегчает приспособление систем к особенностям судов и к отличиям выполняемых ими задач и облегчает расширение функций систем при их совершенствовании. Применение эффективных методов интеграции систем. Автоматизация производственных процессов на начальном этапе привела к применению микропроцессоров (компьютеров) для управления отдельным оборудованием. При дальнейшей автоматизации появилась необходимость создания локальных объединений компьютеризованных устройств с целью централизации управления, совместного использования информационных ресурсов и для решения комплексных задач. Такое объединение по существу сводится к обеспечению информационного взаимодействия между компьютерами, управляющими отдельными устройствами. При магистрально-модульном методе отдельные части объединяются в интегрированную систему путем подсоединения компьютеров, управляющих этими частями, к коммуникационной среде в виде магистрального канала. В небольших по размерам сетях, в частности в судовых, для обеспечения взаимодействия отдельных ЭВМ обычно используется один магистральный канал (моноканал), замкнутый в виде петли (кольца), в которой циркулирует информация. Приборы, обеспечивающие подключение микропроцессорных систем к каналу, называются блоками доступа к нему, либо интерфейсными устройствами. При использовании модульно-иерархического метода части (модули), из которых образуется ИС, располагаются по уровням их значимости. Модули на низшем уровне решают узкие задачи, а другие модули, высшие по иерархии, обеспечивают решение задач более высокого уровня путем управления и коррекции модулей низшего уровня.
Интегрированная система судна и место в ней ИСМ
Морское судно является подвижным плавучим объектом, предназначенным для выполнения определенной целевой функции (перевозки грузов, пассажиров, лова рыбы, прокладки различного вида кабелей, выполнения гидрографических работ и т.д.). Оно оснащено оборудованием для:
– обеспечения движения и маневрирования, – осуществления внешней и внутренней радиосвязи, – снабжения энергией различных ее судовых потребителей, – поддержания условий обитаемости экипажа и функционирования судовых механизмов, – борьбы за живучесть судна и за предотвращение потери эксплуатационных свойств, – достижения предписанных целей функционирования, – выполнения других функций.
Совокупность судового оборудования, выполняющего указанные функции, называют судовыми техническими средствами (ТС). К ним относят механизмы движительно-рулевого комплекса, источники выработки разных видов энергии, механизмы, агрегаты, установки всех судовых систем и устройств.
Управляющие судовыми техническими средствами комплексы представляют собой сложные эргатические (человеко-машинные) системы. Как всякая эргатическая система, управляющий судовой комплекс включает в себя две части: “человека” и искусственную систему (средства автоматики). На современных судах для решения задач управления судовым оборудованием на всех уровнях используются средства микропроцессорной техники (СМТ).
Интегрированная микропроцессорная система, управляющая судовыми процессами (судовождением, выработкой энергии, и т.д.) с целью обеспечения безопасности и выполнения задачи функционирования судна, ниже называется интегрированной системой судна (ИСС). Ее объект управления включает в себя корпус судна и совокупность всех судовых технических средств.
ИСС является многоконтурной системой и включает разного вида и различного уровня управляющие устройства и системы, осуществляющие сбор и обработку информации о состоянии различных управляемых судовых объектов и внешней среды, выработку решений о воздействии на объекты и их исполнение.
Автоматизация судовых процессов на базе СМТ производилась поэтапно. Вначале автоматизировались простейшие операции. Затем создавались подсистемы управления одним или совокупностью технических средств для выполнения определенных функций (функционально ориентированные подсистемы). Примером может служить система управления судном по курсу и ряд других. Затем функционально ориентированные подсистемы интегрировались в системы для решения более сложных задач (проблем). В свою очередь полученные интегрированные системы объединялись в проблемно-ориентированные управляющие системы более высокого уровня.
 Микропроцессорные средства позволили отойти от организации систем управления, основанной на жестких пространственных связях между частями системы. Единый способ преобразования и передачи информации в СМТ позволяет интеграцию устройств управления нижнего уровня с целью создания системы для решения задач более высокого уровня обеспечивать с помощью программных средств и информационных каналов между интегрируемыми объектами. Это освобождает судно от различного вида механических, электрических, пневматических, гидравлических и другого вида «жестких» передач между интегрируемыми устройствами и позволяет резко уменьшить стоимость судовых систем управления и их установки на судне.
Микропроцессорные средства позволили отойти от организации систем управления, основанной на жестких пространственных связях между частями системы. Единый способ преобразования и передачи информации в СМТ позволяет интеграцию устройств управления нижнего уровня с целью создания системы для решения задач более высокого уровня обеспечивать с помощью программных средств и информационных каналов между интегрируемыми объектами. Это освобождает судно от различного вида механических, электрических, пневматических, гидравлических и другого вида «жестких» передач между интегрируемыми устройствами и позволяет резко уменьшить стоимость судовых систем управления и их установки на судне.
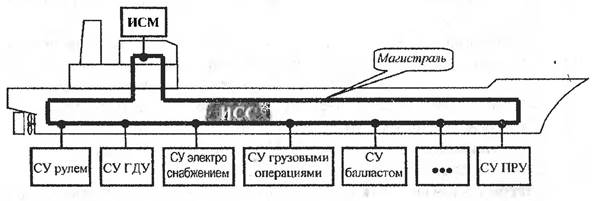
Рис. 1.1 Схема интегрированной системы судна
Объем задач, решаемых электронными управляющими комплексами различных судов, и структура этих комплексов неодинаковы. Это зависит от степени автоматизации задач управления судном. Электронные управляющие судном комплексы могут состоять из отдельных несвязанных подсистем, решающих определенные локальные задачи. На современных судах электронные проблемно-ориентированные подсистемы объединяются в единую интегрированную систему судна. Эта система также называется судовым интегрированным управляющим комплексом. Типовая интегрированная система судна (рис. 1.1) включает в себя:
•административную систему; •интегрированную систему ходового мостика, •систему управления электроснабжением (Power supply system), •систему дистанционного управления главной движительной установкой - ГДУ (Main engine control system), •систему дистанционного управления рулем судна (Rudder control system), •систему дистанционного управления подруливающими устройствами (Thruster control system), •систему управления грузовыми операциями. Например, для танкера это системы: управления погрузкой/выгрузкой (Tank handling system), замера уровней в танках (Tank sounding system), разогрева груза (Tank heating system) и др., •систему управления балластировкой судна (Anti heeling system), •и ряд других.
Объединение названных систем в ИСС обычно производится с помощью магистрального кольцевого информационного канала.
По существу ИСС представляет собой локальную информационную сеть, чаще всего основанную на фиброоптической технологии. Отдельные входящие в ИСС системы также могут иметь структуру сетей.
Выход из строя одной из систем в сети ИСС не влияет на работоспособность других систем, если только выполнение их функций не зависит напрямую от информации вышедшей из строя части. Сетевое построение также обеспечивает открытость ИСС, позволяющую расширять ее состав путем подключения к магистрали новых систем и сетей. Интегрированная система ходового мостика является главной в ИСС и исполняет роль ее управляющего центра.
Дата добавления: 2020-11-23; просмотров: 193; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!