Плоское напряженное состояние
НАПРЯЖЕНИЯ И ДЕФОРМАЦИИ
Понятие о напряжениях, связь с внутренними усилиями
В брусе
Основываясь на модели сплошного тела, можно считать, что внутренние силы непрерывно распределены по всему сечению. Мерой внутреннего силового поля является напряжение. Есть два представления о напряжениях: среднее напряжение на данной площадке и истинное напряжение в данной точке.
Выделим в сечении С в окрестности точки К элементарную площадку  . Равнодействующую внутренних сил на этой площадке обозначим
. Равнодействующую внутренних сил на этой площадке обозначим  . Отношение
. Отношение

выражает среднее напряжение на данной площадке. Уменьшая размеры площадки, в пределе получим

Векторная величина р есть истинное напряжение в точке К в сечении С. Напряжения, как и поверхностная нагрузка, выражаются в Н/м2 (Па).
Полагая, что R − непрерывная функция А, получаем

Если R зависит от одной переменной А, то

Напряжение p можно разложить на две составляющие: а) по нормали v к плоскости сечения – нормальное напряжение σv; б) в плоскости сечения – касательное напряжение τv. Такое разложение представляет практический интерес, поскольку опыты обнаруживают два характерных вида разрушения материала: вследствие отрыва частиц материала друг от друга (разрыв) и вследствие сдвига частиц материала по сечению (срез).
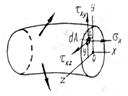 Внутренние усилия в брусе находятся в тесной связи с составляющими напряжений. При выбранной в п.2.1 системе координат нормальное напряжение обозначим σx, а вместо одного касательного напряжения покажем два: τxy – параллельное оси у, τxz – параллельное оси z (рис.4.1).
Внутренние усилия в брусе находятся в тесной связи с составляющими напряжений. При выбранной в п.2.1 системе координат нормальное напряжение обозначим σx, а вместо одного касательного напряжения покажем два: τxy – параллельное оси у, τxz – параллельное оси z (рис.4.1).
|
|
|
Первый индекс в обозначении касательного напряжения (х) указывает, что оно действует на площадке, перпендикулярной оси х; второй индекс указывает, какой оси параллельно напряжение. Нормальное напряжение считают положительным если Рис.4.1
его направление совпадает с направлением внешней нормали к плоскости сечения. Касательное напряжение на этой площадке считают положительным,
если его направление совпадает с направлением соответствующей оси коорди-нат.
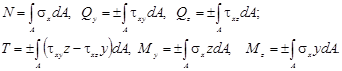
Суммируя проекции элементарных сил  a также их моменты относительно осей Ох, О y, О z получаем
a также их моменты относительно осей Ох, О y, О z получаем
Правила знаков внутренних усилий установлены независимо от направления координатных осей, знаки же напряжений связаны с этими осями. Это приводит к необходимости согласования знаков в отдельных уравнениях, выражающих связь внутренних усилий и напряжений.
Интегральные формулы позволяют определить внутренние усилия через напряжения, если установлены законы распределения последних по сечению. Поскольку эти законы зависят от вида деформации, то обратная задача (определение напряжений через внутренние усилия) решается путем совместного использования условий равновесия и условий деформирования тела. Задача становится статически неопределимой.
|
|
|
В общем случае напряженное состояние в точке – состояние тела в окрестности этой точки, определяемое совокупностью всех напряжений, действующих на все элементарные площадки, содержащие рассматриваемую точку.
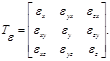
В дифференциальные уравнения равновесия бесконечно малого прямоугольного параллелепипеда входят шесть независимых скалярных величин, соответствующих составляющим напряжений по его граням. Они определяют тензор напряжений:
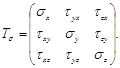
При этом учитывается свойство парности касательных напряжений (τxy = τyx, τxz = τzx, τyz= τzy): на двух взаимно перпендикулярных площадках составляющие касательных напряжений, перпендикулярные к линии пересечения площадок, равны по величине и взаимно направлены либо к линии пересечения, либо от нее.
Если площадка dA совпадает с поверхностью тела, то составляющие напряжения трансформируются в составляющие внешних сил, действующих на
|
|
|
поверхности тела. Соответствующие уравнения выражают условия на поверх-ности, или статические граничные условия.
Площадка, на которой касательные напряжения равны нулю, называется главной. Через точку проходят три главные площадки. По ним действуют главные напряжения, которые обозначаются σ1, σ2, σ3 (σ1 ≥ σ2 ≥ σ3).
Плоское напряженное состояние
В общем случае при переходе из одной точки в другую главные напряжения изменяются непрерывно по величине и направлению. Случай, когда одно из главных напряжений становится равным нулю, называют плоским (двухосным) напряженным состоянием в точке. В соседних точках тела напряженное состояние может быть пространственным (трехосным).
Встречаются и такие случаи, когда во всех точках тела напряженное состояние плоское и при этом площадки с нулевым главным напряжением параллельны друг другу. В таком случае все тело испытывает плоское напряженное состояние. Примером может служить пластинка, подверженная воздействию поверхностной и (или) объемной нагрузки, распределенной равномерно по толщине. При этом равны нулю главные напряжения на площадках в плоскости пластинки, а два других отличны от нуля и, вообще говоря, изменяются при переходе из одной точки в другую.
|
|
|
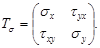
Три независимые скалярные величины, соответствующие составляющим напряжений, определяют тензор напряжений:
Для определения главных напряжений представляет интерес исследование напряжений, действующих лишь на площадках, перпендикулярных к главной площадке с нулевым главным напряжением. Рассмотрим прямую призму с основанием ВС D высотой dz (рис.4.2).
Уравнения равновесия запишем в виде проекции сил на направления σα и τα: 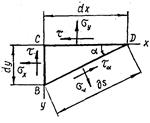
σα dzds – (σy dzds cosα) cosα– (τ dzds cosα)sinα –– (σx dzds sinα) sinα – (τ dzds sinα) cosα = 0,
τα dzds + (σy dzds cosα) sinα – (τdzds cosα) cosα –– (σx dzds sinα) cosα + (τdzds sinα) sinα= 0.
После сокращения на dzds и преобразо-вания получим
σα = σxsin2α + σycos2α+τsin2α;
τα=  (σx – σy)sin2α+ τcos2α. Рис. 4.2
(σx – σy)sin2α+ τcos2α. Рис. 4.2
Чтобы определить положение главных площадок, следует либо приравнять нулю производную dσα/ dα, либо положить равными нулю касательные напряжения τα ввиду их отсутствия на главных площадках. В обоих случаях
получаем следующее уравнение для угла наклона главных площадок (α0):
(σx – σy) sin2α0+ τcos2α0 = 0 ,
откуда
tg2α0= 2τ /(σу– σх) ,
чему соответствуют углы α0′ и α0′+ 90°, которые определяют две взаимно перпендикулярные площадки.
Исследуя вторую производную d 2σα/ dα2, можно убедиться, что на главной площадке под углом α0′ при σy >σx действует максимальное главное напряжение σ1 ,а на площадке под углом α0′+ 90° действует минимальное главное напряжение σ2.
Для определения главных (экстремальных нормальных) напряжений отразим значение угла α0 в выражении σα, используя при этом формулы для sin2α0, соs2α0, соs2α0, sin2α0, приведенные в п.3.4. В итоге

Если одно из напряжений σ x или σ y равно нулю, то формула примет вид
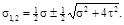
Экстремальные касательные напряжения можно выразить через главные напряжения: ± ( σ1− σ2), что соответствует выражению

Они действуют на площадках, наклоненных к главным под углом 45° и направлены от σmin к σmax (рис.4.3). В общем случае на этих площадках σα ≠ 0.
Если оси х и у совмещены с главными осями 1 и 2, то
σα = σ1sin2α + σ2cos2α ;
τα= (σ1 − σ2)sin2α.
 При α = 45° и σ2 = −σ1 = −σ имеем τα = σ, σα = 0. Такое напряженное состояние называется чистым сдвигом, а площадки – площадками чистого сдви-га.
При α = 45° и σ2 = −σ1 = −σ имеем τα = σ, σα = 0. Такое напряженное состояние называется чистым сдвигом, а площадки – площадками чистого сдви-га.
В случае σ1 = σ2 = σ на всех площадках, проходящих через исследуемую точку, τα = 0, σα = σ. Такое напряженное состояние называется равномерным двухосным растяжением (или сжатием). Рис. 4.3
При одноосном напряженном состоянии (σ2 = σ3 = 0) имеем
σα = σ1sin2α; τα=  σ1sin2α.
σ1sin2α.
Экстремальные касательные напряжения равны ± σ1 /2.
Перемещения и деформации
Твердое тело, как правило, закреплено. В таком случае перемещение точки тела вызывается только его деформированием. Это перемещение характеризуется вектором  с проекциями u , v , w на оси x , у, z , являющимися функциями координат: u = u(x , у, z), v = v(x , у, z), w = w(x , у, z). В силу сплошности тела эти функции и их частные производные требуемого порядка по x , у, z непрерывны, кроме, возможно, особых точек, линий или поверхностей.
с проекциями u , v , w на оси x , у, z , являющимися функциями координат: u = u(x , у, z), v = v(x , у, z), w = w(x , у, z). В силу сплошности тела эти функции и их частные производные требуемого порядка по x , у, z непрерывны, кроме, возможно, особых точек, линий или поверхностей.
Элементарный параллелепипед, вырезанный в окрестности какой-либо точки, деформируется таким образом, что изменяется длина его ребер и искажаются первоначально прямые углы между гранями, т.е. изменяются объем и форма.
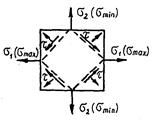
 Для определения линейной деформации в точке А вдоль оси n (рис.4.4) возьмем в теле на этой оси малый отрезок АВ длиной ∆l . После деформирования тела он обратится в отрезок А'В', составляющий с отрезком АВ угол ∆α, и будет иметь длину ∆l '. Исходя из незначительного изменения геометрических характеристик тела в результате деформирования, можно считать Рис. 4.4
Для определения линейной деформации в точке А вдоль оси n (рис.4.4) возьмем в теле на этой оси малый отрезок АВ длиной ∆l . После деформирования тела он обратится в отрезок А'В', составляющий с отрезком АВ угол ∆α, и будет иметь длину ∆l '. Исходя из незначительного изменения геометрических характеристик тела в результате деформирования, можно считать Рис. 4.4
угловое перемещение (угол поворота) ∆α малым по сравнению с единицей, так что cos∆α ≈ 1. Величина ∆λ = ∆l ' – ∆l представляет собой абсолютное изменение первоначальной длины отрезка АВ. Величина ∆λ/∆l есть средняя линейная деформация вдоль оси n в точке А.
Уменьшая размеры отрезка, в пределе получаем

Безразмерная величина εn есть истинная линейная деформация вдоль оси n в точке А.
Полагая, что λ − непрерывная функция l, получим
εn = ∂ λ /∂l.
Если λ зависит от одной переменной l, то
εn = dλ /dl.
Для определения деформации сдвига в точке А в плоскости mn возьмем на этой плоскости два малых отрезка АВ и АС, пересекающихся в точке А под углом 90°. После деформирования тела они обратятся в отрезки А'В' и А'С' с
иным углом пересечения и расположатся в другой плоскости m ' n ', составляющей с первоначальной угол ∆α. Принимая, как и раньше, cos∆α ≈ 1, определим деформацию сдвига как разность величин углов В'А'С' и ВАС. Наложим угол В'А'С' на угол ВАС (рис.4.5) и установим углы поворота отрезков относительно своих первоначальных положений – α1 и α2. Величина α1 + α2 = γmn и есть деформация сдвига в точке А в плоскости mn.
 Положительными принимают линейную деформа-цию, соответствующую растяжению, и деформацию сдвига, отвечающую уменьшению первоначального угла пересечения отрезков.
Положительными принимают линейную деформа-цию, соответствующую растяжению, и деформацию сдвига, отвечающую уменьшению первоначального угла пересечения отрезков.
Полагая деформации малыми, мы можем в дальнейшем пренебрегать ими по сравнению с едини-цей, а также их высокими степенями по сравнению с первой степенью.
Рис. 4.5 Деформированное состояние в точке – состояние тела в окрестности данной точки, определяемое совокупностью деформаций всех линейных элементов, проходящих через данную точку. В случае малых деформаций оно полностью определяется линейными деформациями трех взаимно перпендикулярных линейных элементов тела, проходящих через данную точку, и тремя деформациями сдвига этих линейных элементов. Соответствующие шесть независимых скалярных величин определяют тензор деформаций:
 |
Здесь

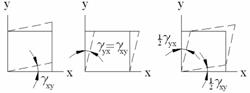
 (при γyx=γxy),…Последнее оправдывается идентичностью трех ситуаций для грани деформированного параллелепипе-да, что видно, например, из рис. 4.6 (в плоскости xy).
(при γyx=γxy),…Последнее оправдывается идентичностью трех ситуаций для грани деформированного параллелепипе-да, что видно, например, из рис. 4.6 (в плоскости xy).
Рис. 4.6
Главные оси деформации – три взаимно перпендикулярные прямые, прохо-дящие через данную точку тела и совпадающие по направлениям с такими тре-мялинейными элементами тела, которые остаются взаимно перпендикулярны-ми и после деформации. Линейные деформации по направлениям этих осей на-
зываются главными деформациями и обозначаются ε1, ε2, ε3 (ε1 ≥ ε2 ≥ ε3).
Кинематические граничные условия на части поверхности тела с заданным вектором перемещений  имеют вид
имеют вид 
Дата добавления: 2020-11-15; просмотров: 72; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!