Граф связей системы модуля главного движения.
Структура модуля главного движения.
Структура модуля представлена на рис. 1 и состоит из асинхронного электродвигателя АД и механической системы привода МС:
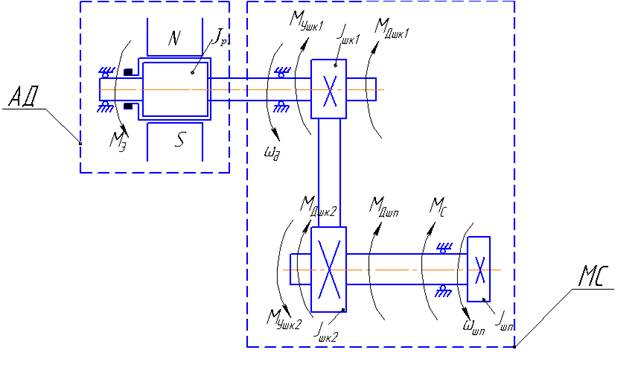
Рис. 1. Функциональная схема «АД – ременная передача – шпиндель».
Электродвигатель при подаче напряжения на статор создаёт крутящий момент M Э, который воспринимается механической системой. На валу двигателя расположен ведущий шкив ремённой передачи, через которую вращение передаётся на ведомый шкив, расположенный на шпинделе. Ременная передача имеет упругий элемент – ведущую ветвь ремня. Расчетная схема передачи показана на рис. 2:
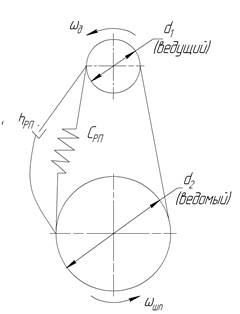
Рис. 2. Расчетная схема ременной передачи.
На основе функциональной и расчетной схем составляется математическая модель системы.
Математическая модель модуля главного движения.
Как принято при моделировании, вначале составляются топологические, затем компонентные уравнения элементов системы:
Топологические уравнения.
Первый механический элемент:
Этот элемент состоит из ротора двигателя и расположенного на нём ведущего шкива
M Э – МИ1 – МУшк1 = 0;
Здесь: M Э – момент, создаваемый электродвигателем,
МИ1 – момент инерции ротора двигателя со шкивом,
МУшк1 – упругий момент сопротивления от растяжения ремня на ведущем шкиве.
Второй механический элемент:
|
|
|
Этот элемент состоит из шпинделя и расположенного на нём ведомого шкива
M Ушк2 – МДшк2 – МДшп – МИ2 – МС = 0.
Здесь: МУшк2 – упругий момент на ведомом шкиве,
МДшк2 – диссипативный момент на ведомом шкиве,
МДшп – диссипативный момент в подшипниках шпинделя,
МИ2 – момент инерции шпинделя со шкивом,
МС – момент сопротивления на шпинделе от силы резания.
Модель двигателя здесь не рассматриваем, эти модели есть в программах моделирования на ЭВМ.
Компонентные уравнения.
МИ1 = ( J Р + J шк1 ) ·  ;
;
МУшк1 = F у · r 1 = СРП · ∆х· r 1 ;
МУшк2 = F у · r 2 = СРП · ∆х· r 2 ;
МДшк2 = F Д · r 2 = h РП ·  · r 2 ;
· r 2 ;
МДшп = μ · ω шп ;
МИ2 = ( J шк2 + J шп ) ·  ,
,
∆х = х1 – х2 ,
х1 = Фд · r 1 ,
х2 = Фшп · r 2 .
В формулах обозначены:
МИ, МУ, МД – момент инерции, упругий момент и диссипативный момент соответствующих элементов,
J р - момент инерции ротора,
J шк1 и J шк2 - моменты инерции ведущего и ведомого шкивов,
J шп - момент инерции шпинделя.
F у – упругая сила растяжения ремня,
F Д – диссипативная сила рассеивания энергии при растяжении ремня,
СРП – жёсткость ветви ремня,
∆х – разность смещений х1 и х2 точек контактов ремня со шкивами,
|
|
|
r 1 и r 2 – радиусы шкивов,
h РП – коэффициент рассеивания энергии ремённой передачи,
μ - коэффициент рассеивания энергии в подшипниках шпинделя,
ω шп – частота вращения шпинделя,
ω р – частота вращения ротора двигателя,
 - углы поворота ротора двигателя и шпинделя.
- углы поворота ротора двигателя и шпинделя.
Следующий этап – составление системы дифференциальных уравнений подстановкой компонентных уравнений в топологические. На данном практическом занятии этот этап выполняться не будет, так как целью занятия является составление структурной модели системы на основе графов связей.
Граф связей системы модуля главного движения.
Граф связей составляется на основе топологических и компонентных уравнений. Методика составления графа связей подробно была изложена в лекциях и предыдущих практических занятиях. На рис. 3 представлен граф связей системы модуля главного движения. Здесь появились новые обозначения:
Рис. 3. Граф связей системы «ЭД – ременная передача – шпиндель».
На основе графа связей составляется структурная модель системы. Методика составления структурной модели также была изложена на предыдущих лекциях и практических занятиях.
|
|
|
Задание на практику:
Составить структурную модель (на основе графа связей) и выражения передаточных функций (по компонентным уравнениям элементов без численных значений).
Результаты представить в течение недели.
Дата добавления: 2020-11-15; просмотров: 47; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!