Регулирование скорости синхронного двигателя.
После вхождения синхронного двигателя в синхронизм его скорость при изменениях момента нагрузки на валу до некоторого максимального значения Мmах остается постоянной и равной синхронной скорости

|
Так как изменение числа пар полюсов zp у серийно выпускаемых двигателей не применяется, то частотное регулирование является практически единственным способом регулирования угловой скорости синхронных двигателей. Оно характеризуется в основном такими же показателями, что и частотное регулирование скорости асинхронных двигателей с короткозамкнутым ротором. Это регулирование плавное, двухзонное. Диапазон регулирования вверх от номинальной синхронной скорости ограничивается механической прочностью ротора, его балансировкой и качеством подшипников. Диапазон регулирования вниз от номинальной синхронной скорости может достигать значений D = 1: (50 - т-100) и более с учетом абсолютной жесткости механических характеристик двигателя и обеспечения синусоидальности напряжения питания. Стабильность скорости высокая. Допустимая нагрузка при постоянном возбуждении и независимой вентиляции соответствует номинальному моменту.
Использование полупроводниковых преобразователей частоты открывает большие возможности в отношении формирования требуемых статических и переходных процессов частотно-регулируемых синхронных электроприводов.
|
|
|
В отличие от асинхронного короткозамкнутого двигателя при частотном регулировании скорости синхронный двигатель обладает тремя каналами управления моментом: изменением тока возбуждения /в, изменением напряжения обмоток статора Uj и изменением частоты f j
напряжения обмоток статора.
Механические характеристики производственных механизмов и электроприводов преобразователь частоты - синхронный двигатель для законов регулирования класса Uj jfj = const приведены на рис. 5.56.
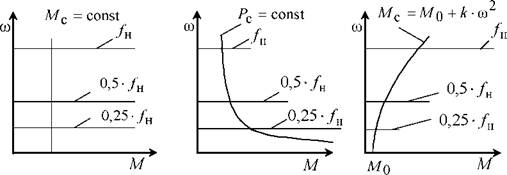 Рис. Механические характеристики производственных механизмов и электроприводов преобразователь частоты - синхронный двигатель
Рис. Механические характеристики производственных механизмов и электроприводов преобразователь частоты - синхронный двигатель
|
Рассмотренные законы управления при частотном регулировании скорости синхронного двигателя справедливы только в первом приближении, особенно для явнополюсного синхронного двигателя, так как неучет реактивного электромагнитного момента приводит к значительным (до 20 %) погрешностям механических свойств двигателя.
Синхронный двигатель обладает очень важным свойством - при подаче на статорные обмотки постоянного напряжения (f = 0) он создает тормозной момент при неподвижном роторе, обеспечивая механическую фиксацию ротора в заданном положении.
|
|
|
Переходный процесс в электроприводах с асинхронным двигателем
При исследовании переходных режимов в приводах с АД в первом приближении пренебрегаем электромагнитными процессами, так как они протекают значительно быстрее электромеханических процессов.
Рассмотрим переходный процесс в АД с ФР

Рис. Механические характеристики АД с ФР при пуске.
При линейной зависимости момента двигателя и момента сопротивления от скорости в пределах рассматриваемых интервалов, переходный процесс описывается системой уравнений:

где β, βс – модули жесткости механической характеристики двигателя и механизма;
М1, Мс0 – моменты двигателя и механизма при скорости, равной нулю.
Решая систему уравнений относительно угловой скорости, получим дифференциальное уравнение
 / поделим на
/ поделим на  (1)
(1)

 (2)
(2)
где ωс – точка пересечения характеристик двигателя и механизма, установившаяся скорость вращения.
 - механическая постоянная времени электропривода, с.
- механическая постоянная времени электропривода, с.
Постоянная времени Тм является важным параметром электропривода, характеризующим темп изменения момента и угловой скорости двигателя в переходных процессах. Тм можно трактовать как время разгона двигателя из неподвижного состояния до установившегося значения скорости, если начальная величина динамического момента сохранялась бы в процессе разгона неизменной.
|
|
|
Общее решение уравнения (2) выражается так:
 (3)
(3)
Так как скорость и момент двигателя в рассматриваемом случае связаны между собой линейно, то зависимость момента от времени аналогична:
 (4)
(4)
Полученные выражения для момента и скорости при принятых допущениях имеют универсальный характер. Они остаются справедливыми для различных переходных процессов (пуск, торможение, сброс и наброс нагрузки) при условии линейно изменющихся от скорости моментов М и Мс. В каждом конкретном случае в выражения (3), (4) должны быть подставлены соответствующие значения ωнач, ωуст, Мнач, Муст и Тм.
Если в частном случае Мс=const (характеристика вертикальная прямая), то βс=0, и тогда

 , где Δω, ΔМ – приращения скорости и момента на прямолинейном участке механической характеристики АД.
, где Δω, ΔМ – приращения скорости и момента на прямолинейном участке механической характеристики АД.
Дата добавления: 2020-04-25; просмотров: 490; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!