Контроллер ДПТ ( Motorcontroller )
Знакомство со станцией
Цель работы:
· Изучение конструкции мехатронной станции и принципов действия входящих в неё элементов;
· Произведение базовых пусконаладочных работ;
· Получение практических навыков по определению и настройке входов и выходов станции.
Ход работы.
1. Изучить внимательно теоретический раздел.
2. Ознакомиться с последовательностью подготовки станции к работе.
3. Рассмотреть пример таблицы входов/выходов.
Теоретические раздел
Общий вид станции
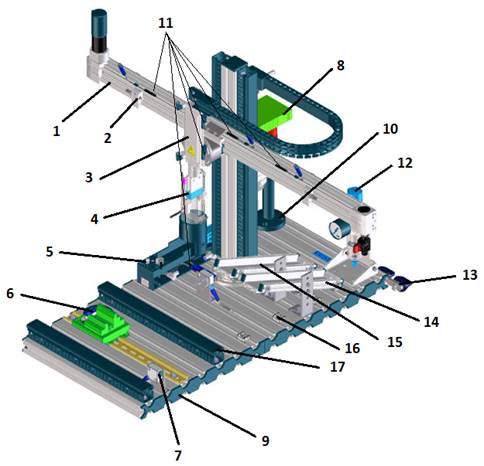
Рисунок 1.1 - Общий вид станции погрузочно-разгрузочных работ (Handling station )
На рисунке 1 представлен общий вид станции с указанными элементами:
1 – модуль линейного перемещения по оси X каретки схвата 3 (с электромеханическим зубчато-ременным приводом на одной станции (далее – станция 1) и с бесштоковым пневмоцилиндром на другой станции (далее – станция 2));
2 – демпфирующий ограничитель хода каретки 3;
3 – каретка с пневмоприводом для вертикального перемещения схвата 4 по оси Z;
4 – cхват (gripper) с пневмоприводом для захвата заготовок (workpiece);
5 – магазин деталей (magazine)
6 – Колодка ввода/вывода (распределитель) с 24-х контактным разъемом SysLink. Служит для коммутации проводов датчиков и приводов и соединения их по проводу SysLink с ПЛК или SimulBox. Светодиоды установлены на входных и выходных клеммах для простого отображения активности цепей и для быстрой диагностики и устранения неисправностей;
|
|
|
7 – оптический датчик;
8 – контроллер ДПТ (двигателя постоянного тока);
9 – профильная плита, на которой закреплены остальные корпусные элементы;
10 – сигнальная колона (светофор);
11 – герконы (герметичные контакты) – датчики, срабатывающие под воздействием внешнего магнитного поля, например от магнита, установленного в каретке 3;
12 – блок подготовки воздуха (воздушный редуктор). Имеет на себе ручку регулировки местного давления, а также манометр для его индикации;
13 – крепление для механического соединения двух станций между собой;
14 – лоток ската 2;
15 – лоток ската 1;
16 – держатель кабеля (cable holder), нужен для фиксации проводов и шлангов к основанию станции;
17 – кабель-канал, необходим для аккуратной укладки проводов, подводимых к колодке 6.
Станция сконструирована таким образом, чтобы перемещать заготовки из магазина в один из лотков с возможностью сортировки деталей по цвету.
Питается станция через разъём SysLink постоянным напряжением +24V, а также линией сжатого воздуха (0,4-0,6 МПа) через пневмошланг, подведённый к воздушному редуктору на станции.
Колодка входов/выходов ( I / O terminal )
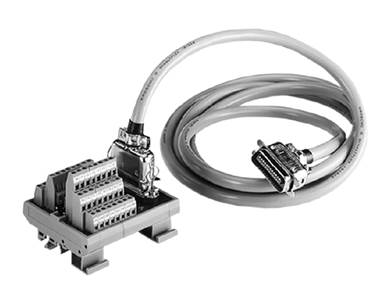
Рисунок 1.2.1 – Колодка с зажимающими винтами и с кабелем
|
|
|
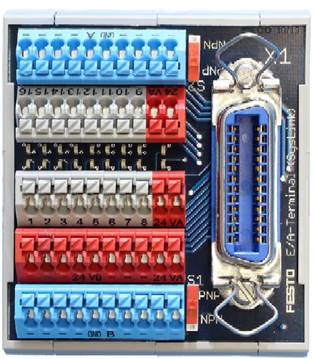
Рисунок 1.2.2 – Колодка с быстрозажимными разъемами
Колодка содержит в себе 8 входов (на рисунке 1.2.2 серые разъемы 1-8) и 8 выходов (9-16). Также в ней имеются линии +24V и GND для запитки датчиков и приводов. Все разъемы соединены с соответствующими контактами в 24-х контактном разъёме. Светодиоды около каждого входа и выхода индицируют их работу. Колодка фиксируется на стандартную DIN рейку, размещенную на станции между двух кабель-каналов.
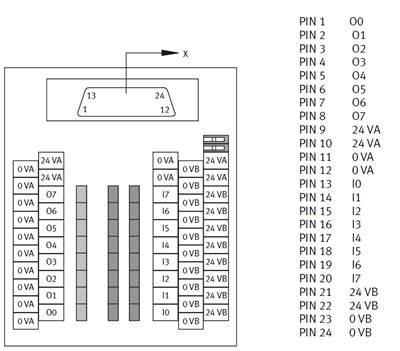
Рисунок 1.2.3 – Разметка разъёмов колодки с винтовыми зажимами
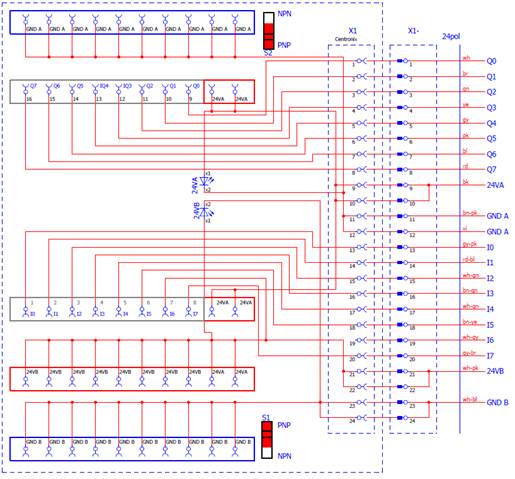
Рисунок 1.2.4 – Схема соединений в колодке с быстрозажимными разъемами
ВНИМАНИЕ: переключатели на колодке должны всегда находиться в положении PNP во избежание непредвиденных ситуаций!
Кабель SysLink


Рисунок 1.3.1 – Шнур SysLink; черный слева, серый справа
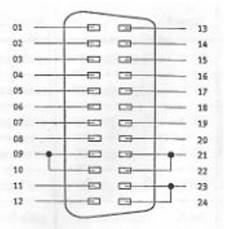
Рисунок 1.3.2 – Распиновка 24-х контактного разъёма
Шнур SysLink служит для подключения сложных промышленных систем, в частности управляющих элементов с датчиками и приводами. Контакты 1-8 передают биты выходов, 13-20 – входов; 9-10 и 21-22 – +24V; 11, 12, 23-24 – 0V.
Контроллер ДПТ ( Motorcontroller )

Рисунок 1.4.1 – Внешний вид ДПТ контроллера
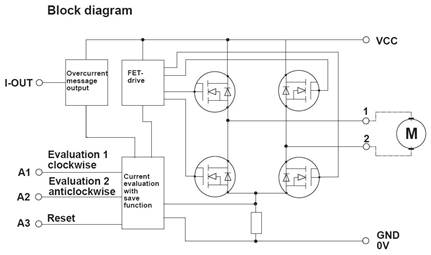
Рисунок 1.4.2 – Схема контроллера ДПТ
Контроллер выполнен по схеме Н-моста, в котором в один момент времени работают только два диагональных транзистора, переключая таким образом направление вращения двигателя. Входы A1 и A2 включают вращение по часовой и против часовой соответственно. Выход I-OUT выдаёт сигнал о слишком большом потреблении тока. На передней панели устройства также присутствуют регулировочные винты для настройки скорости вращения двигателя.
|
|
|
ВНИМАНИЕ: при использовании симуляционного пульта крайне не рекомендуется доводить каретку до крайних положений на стенде с электромеханическим приводом оси Х во избежание вынужденной остановки и, как следствие, перегрева двигателя.
Дата добавления: 2020-04-25; просмотров: 194; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!