СРЕДСТВА АВТОМАТИЧЕСКОЙ РАДИОЛОКАЦИОННОЙ ПРОКЛАДКИ (САРП)
Общие понятия. Структурная схема САРП.
С точки зрения повышения степени автоматизации радиолокационной проводки судов следует различать три уровня решения данной задачи:
1. Электронная прокладка – самый низкий уровень автоматизации, когда обнаружение цели, захват на сопровождение и сброс с него выполняются вручную, а само сопровождение носит полуавтоматический характер. При этом оператор должен постоянно контролировать поведение целей и корректировать вектора их движения.
2. Автосопровождение – средний уровень автоматизации, при котором обнаружение, захват на сопровождение и сброс производятся вручную, а сопровождение выполняется автоматически.
3. Автоматическая радиолокационная проводка – наивысший уровень автоматизации. При этом все перечисленные функции выполняются автоматически, и, кроме того, обязательно предусмотрена имитация маневра на расхождение.
Данный раздел описывает принципы работы устройств, позволяющих решать задачи второго и третьего уровней.
САРП (английское сокращение ARPA – Automatic Radar Plotting Aids) – это радиолокационно-вычислительная система. Она обеспечивает автоматическое сопровождение эхо–сигналов заданных целей, оценивает степень их опасности и выдаёт рекомендации по безопасному расхождению. САРП позволяет решать задачи предупреждения столкновения судов и проводки судна по линии заданного пути.
|
|
|
Согласно Главе V Конвенции SOLAS-74 все морские суда валовой вместимостью 10000 рег.т. и более должны быть оборудованы САРП.
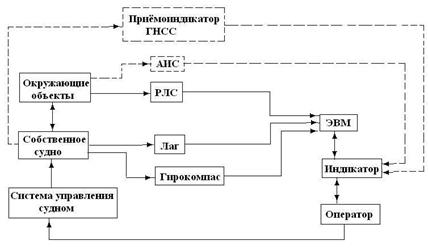
Упрощённая структурная схема САРП представлена на рис. 17.
Основу САРП составляет ЭВМ, использующая в качестве датчиков навигационной информации РЛС, лаг и гирокомпас. ЭВМ на основе этих данных обеспечивает расчёт траекторий движения объектов, опознавание по заданному критерию опасных целей, прогнозирование ситуаций при проигрывании маневра своего судна и отображение этой информации на дисплее. В современных САРП предусмотрено сопряжение с рядом других навигационных средств – приёмоиндикаторами ГНСС, станциями АИС. Использование их в качестве вспомогательных датчиков информации существенно уточняет и дополняет картину навигационной обстановки.
|
Рис. 17. Схема САРП
Функции САРП. Требования ММО к САРП
23 ноября 1995 г. ММО приняла Резолюцию А.823(19) "Эксплуатационные требования к средствам автоматической радиолокационной прокладки (САРП)". Согласно этой Резолюции, САРП должны выполнять следующие функции.
1.Обнаружение. Характеристики должны быть не хуже тех, которые могут быть получены при использовании экрана РЛС.
|
|
|
2.Захват. Захват целей на автосопровождение может быть ручным или автоматическим, при относительных скоростях до 100 узлов. При использовании режима автозахвата должна быть предусмотрена возможность запрета захвата в определенных зонах обзора.
3.Сопровождение. Должно обеспечиваться автоматическое сопровождение, обработка, одновременное отображение и непрерывное обновление данных не менее чем по 20 целям. Сопровождаются цели, видимые на экране в пяти из десяти последовательных оборотах антенны.
4.Отображение. Устройство отображения может быть либо автономным, либо входить в состав РЛС. Должны предусматриваться, по крайней мере, шкалы дальности 3, 6 и 12 миль. Должна допускаться работа в режиме относительного движения при ориентации изображения «Север» и «Направление». Может быть и режим истинного движения.
Информация о курсе и скорости цели должна выдаваться в векторной или графической форме, предусматривается выбор как истинного, так и относительного движения, с указанием стабилизации: относительно грунта или воды.
Через одну минуту после автоматического или ручного захвата цели на экране САРП должна отображаться тенденция её движения, и в течение трех минут – предвычисленный вектор перемещения. Резолюция регламентирует и допустимые погрешности выдаваемой САРП информации. Например, ошибка в дистанции кратчайшего сближения через минуту после начала сопровождения может достигать 2.0 мили, через три минуты – 0.7 мили.
|
|
|
Наблюдатель должен иметь возможность выбрать любую сопровождаемую цель для получения информации. Отображаются:
– текущее расстояние до цели D;
– текущий пеленг на цель П;
– предвычисленная дистанция кратчайшего сближения Dкр;
– предвычисленное время кратчайшего сближения Tкр;
– вычисленный истинный курс цели Kц;
– вычисленная истинная скорость цели Vц.
5.Предупредительная сигнализация. Должна обеспечиваться сигнализация:
– о сближении любой цели на заданное расстояние или о пересечении ей зоны, выбранной оператором (NEW TARGET);
– о появлении опасной цели (COLLIZION WARNING), имеющей расстояние и время кратчайшего сближения меньше значений, установленных оператором;
– о сбросе цели с автосопровождения (LOST TARGET);
|
|
|
– о сбоях в работе САРП или судовых приборов, дающих информацию на САРП (SYSTEM WARNING).
6.Имитация маневра. Должна предусматриваться возможность имитации маневра своего судна на расхождение со всеми сопровождаемыми целями.
Кроме перечисленных в Резолюции функций, большинство САРП предоставляют судоводителю дополнительные возможности, облегчающие решение навигационных задач: режим навигационных электронных линий, режим электронных карт и т.д.
Дата добавления: 2020-04-08; просмотров: 257; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!