Кінематична схема механізму керування редуктором діапазонів
Кінематичні схеми механізмів керування редуктором діапазонів складаємо використовуючи макет редуктора діапазонів . Вимірявши всі необхідні довжини ланок та переміщення виконавчих органів, наносимо на кінематичні схеми показані на рисунках 4 та 5.
Побудову кінематичних схем керування проводимо згідно відносних положень штурвала зведених в таблицю 3.1 та нанесенням всіх необхідних розмірів для побудови теоретичного профілю кулачка
Маючи всі необхідні розміри, поруч з кінематичними схемами механізмів розраховуємо кутові відхилення проміжних ланок.
Таблиця 3.1 - положення шестерень, блоків відповідно до штурвала
| Діапазони регулювання | ||||||
| І | ІІ | ІІІ | ||||
| 1 | 2 | 3 | 4 | 5 | 6 | |
| Ш1 | П | Л | Л | Л | Л | Л |
| К, Ш 2 | Н | Н | Л | Н | П | Н |
| Б1 | Л | Л | Л | Л | П | Л |

Рис. 4 Кінематична схема механізму управління шестернею 1

Рис. 5 Кінематична схема механізму управління шестернею 2 і блоком 1
Побудова профілю кулачків
Побудова профілю кулачків буде проходити через виміри переміщень ланок та їх довжини. Розпочнемо із побудови профілю для систем керування шестернею 1. Вибираємо 1 положення головного механізму керування в якому вмикається 1 діапазон, в цьому положенні ланка механізму на якій знаходиться ролик який ходить по пазу кулачка приймає вертикальне положення. Оскільки ми знаємо довжину цієї ланки(виміряли) і взаємне розміщення центра її обертання то і знаємо першу точку форми кулачка. Далі провертаємо штурвал в наступне положення бачимо що шестерня 1 перемістилася на шліцевому валу вліво на 20мм. Із прямокутного трикутника взнаємо кут повороту ланки управління, який дорівнює 10˚48´. Щоб визначити кут повороту ланки на якій є ролик управління скористаємось формулою представленою нижче. Маючи довжину цієї ланки можемо відкласти 2 точку профілю кулачка. Відповідно у 3 - 6 положеннях точка профілю кулачка буде знаходитись на тому ж радіусі що і в 2 положенні. З’єднавши послідовно плавною кривою всі точки отримаємо траєкторію руху центра ролика управляючої ланки.
|
|
|


Рис.6 Ілюстрація побудови кулачка для керування шестернею 1.
Розглянемо побудову профілю кулачка для управління шестернею 2 і опосередковано блоком 1.
Вибираємо 2 положення штурвала управління . Спостерігаємо що при переході з 2 в 3 положення шестерня 2 зміщається вліво на 30мм відповідно кут повороту куліси α. А при переході з 4 в 5 положення відповідно зміщається в право на 25мм відповідно кут повороту куліси β.
|
|
|
Розпочинаємо побудову з 2 положення штурвала в якому ланка на якій знаходиться ролик управління нахилена на 30˚ до горизонталі вимірявши довжину цієї ланки знаходимо першу точку кулачка яка має свій радіус на кулачку R 2 .
Провертаємо штурвал в 3 положення ланка з роликом відповідно поверне в низ на кут α знаючи довжину ланки визначаємо 2 точку профілю кулачка із своїм радіусом R 1.
Для визначення 3 точки кулачка повернемо штурвал в 5 положення в якому ланка з роликом поверне в верх на кут β відносно нейтрального (другого) положення штурвала. Маючи кут повороту міжцентрові відстані валів знаходимо третю точку профілю кулачка з відповідним радіусом R 3.
Для побудови інших точок використовуємо вже отримані радіуси.
В 1 положенні точка профілю буде знаходитись на радіусі R 2 .
В 4 положенні точка профілю буде знаходитись на радіусі R 2 .
В 6 положенні точка профілю буде знаходитись на радіусі R 2.
З’єднавши точки плавною кривою отримаємо траєкторію руху центра ролика.


Рис.7 Ілюстрація побудови кулачка для керування
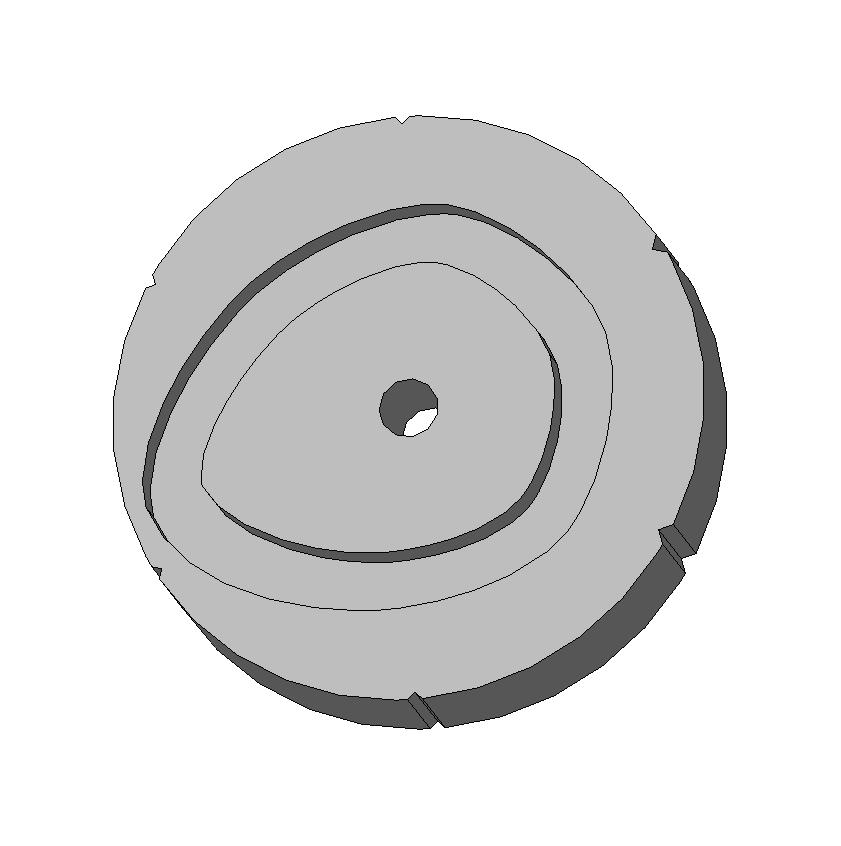
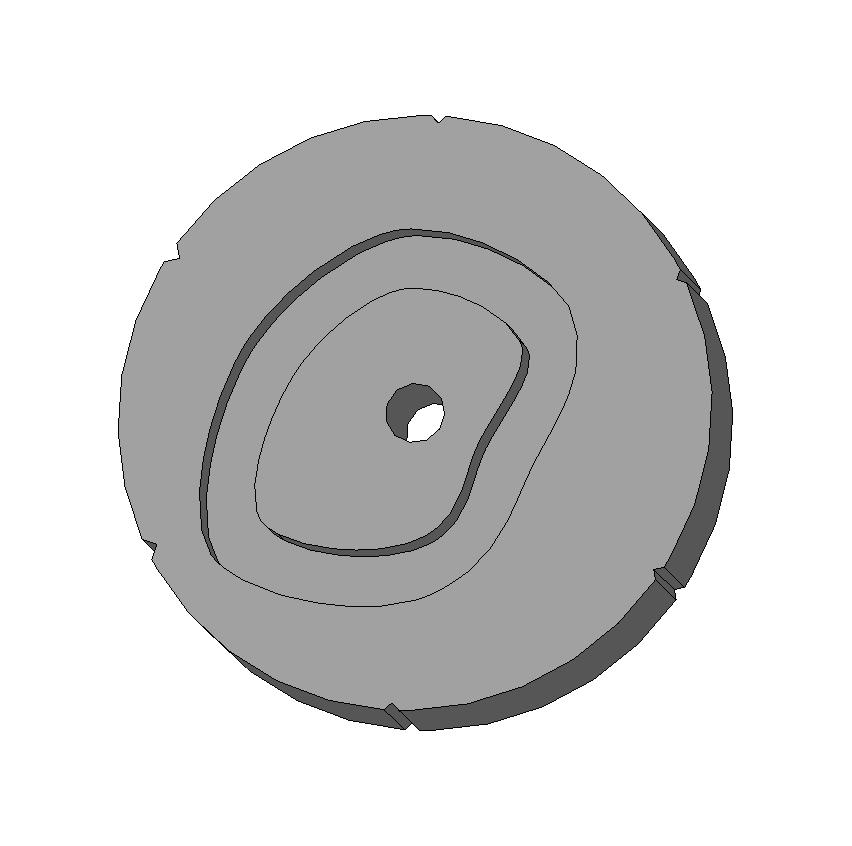
Рис.8 3D зображення диска керування
Висновок : на даній лабораторній роботі ми ознайомились з різними
|
|
|
типами систем керування приводами верстатів та принципом їх роботи. Ознайомились з конструкцією та принципом роботи електромагнітних муфт, а також областю застосування. Побудували кінематичні схеми механізмів керування, створили робоче креслення дискового кулачка.
Дата добавления: 2020-01-07; просмотров: 202; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!