Параллельное соединение звеньев
При параллельном соединении на вход всех звеньев подается общий сигнал, а на выходе образуется сигнал, являющийся суммой выходных сигналов звеньев. Результирующая передаточная функция равна сумме передаточных функций отдельных звеньев:
 . (4.2)
. (4.2)
В пакете Simulink параллельное соединение получаем с помощью сумматора (Sum), который находится в разделе Math основной библиотеки Simulink (рис.4.2).
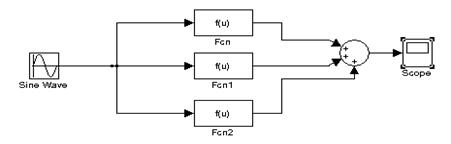
Рис.4.2. Параллельное соединение звеньев в пакете Simulink
Звено, охваченное обратной связью
При соединении обратной связью выходной сигнал первого звена является входным для второго. Причем входной сигнал первого звена образуется в результате сложения или вычитания входного сигнала первого звена и выходного сигнала второго звена. Результирующая передаточная функция будет описываться выражением
 . (4.3)
. (4.3)
Знак (−) в этой формуле ставится при положительной обратной связи, т.е. при сложении сигналов, а знак (+) при отрицательной обратной связи, т.е. при вычитании сигналов. Если второе звено отсутствует в цепи обратной связи, то передаточная функция примет вид
 . (4.4)
. (4.4)
В пакете Simulink соединение с обратной связью получаем с помощью сумматора, указывая знак обратной связи (рис.4.3). Для этого необходимо два раза нажать левой кнопкой мыши на его изображении, в появившемся окне приводятся знаки входов сумматора слева направо по часовой стрелке, которые по умолчанию оба положительны (++). Чтобы сделать второй вход отрицательным, необходимо изменить второй знак на отрицательный.
|
|
|
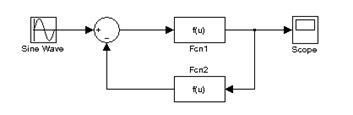
Рис.4.3. Звено, охваченное обратной связью,
в пакете Simulink
В случае охвата обратной связью группы звеньев, что характерно для управления по отклонению, передаточная функция замкнутой системы будет иметь вид
 (4.5)
(4.5)
где W(s) – передаточная функция цепочки звеньев от входного до выходного воздействия; Wр(s) – передаточная функция разомкнутой системы, то есть цепочки из всех звеньев системы, получающейся после разрыва обратной связи.
Для системы, изображенной на рис. 4.3, W(s) = W1(s), а Wp(s) = W1(s)×W2(s) и передаточная функция замкнутой системы превращается в уравнение (4.3).
5. РЕШЕНИЕ ЗАДАЧ АНАЛИЗА ЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Задача анализа линейных систем автоматического управления включает в себя определение свойств системы в целом (показателей устойчивости и качества) при известных характеристиках входящих в нее звеньев.
Таким образом, для проведения анализа системы автоматического управления необходимо и достаточно определить устойчивость, запасы устойчивости и показатели качества системы автоматического управления и сравнить их с предельными показателями устойчивости и качества, заданными для данной системы.
|
|
|
Дата добавления: 2019-11-25; просмотров: 193; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!