Математические модели устройств СУ
С повышением степени детализации описания СУ переходят на следующий уровень абстрагирования (второй), являющийся более низким по отношению к предыдущему – уровень устройств (средств) СУ.
Как и на первом уровне ММ устройств, СУ может быть представлена в виде структурной схемы. Например, одним из часто встречающихся устройств в составе СУ является электронный усилитель, ММ которого приведена на рис. 4.6.
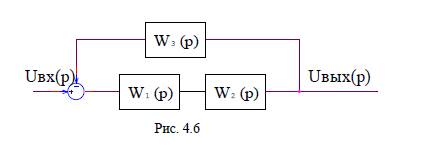
Электронный усилитель работает в малосигнальном режиме и состоит из двух каскадов и цепи обратной связи, имеющих передаточные функции W1(p), W2(p) и W3(p) соответственно. Математическая модель может быть получена непосредственно по схеме рис. 4.6:

т. е. передаточная функция усилителя

где K= W1(p) W2(p).
Математическое описание многих устройств СУ, а также объектов управления, в общем случае есть система обыкновенных дифференциальных уравнений, записанная на общепринятом математическом языке, безотносительно к методу численного решения. Применительно к системам нелинейных ОДУ различают две формы представления:
общая – система ОДУ представлена в неявном виде

где V – вектор фазовых переменных, F – вектор-функция;
нормальная – система уравнений представлена в явном виде, разрешенном относительно вектора производных

Нормальная форма представления удобна для использования ряда методов анализа технических систем.
Параметрами ММ устройств СУ будем считать составляющие коэффициентов дифференциальных уравнений, которые несут определенный физический смысл (например, моменты инерции, коэффициенты усиления, постоянные времени).
|
|
|
Линеаризованная форма представления – представление уравнений модели в линейном виде. Линеаризацию выполняют с помощью разложения нелинейных элементов вектора F в ряд Тейлора с сохранением в разложении только линейных членов. После линеаризации систему (4.9) представляют в форме
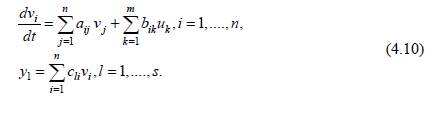
В этой модели имеется n взаимосвязанных дифференциальных уравнений 1-го порядка, в правую часть которых входят m различных внешних воздействий Uk, а также s алгебраических соотношений, связывающих s выходных (управляемых) процессов yl с переменными состояния vi, число которых (n) совпадает с числом уравнений. Коэффициенты aij, bik, cli – параметры модели.
Уравнения (4.10) удобно представить в матричной форме

где V = (V1, V2, …, Vn) – вектор переменных состояния, U = (U1, U2, …, Um) – вектор внешних воздействий, Y = (Y1, Y2,..., Ys) – вектор выходов, A = {aij, i = 1, 2,..., n; j = 1, 2,..., n}, B = {bik, i = 1, 2,..., n; k = 1, 2,..., m}, C = {cli, l = 1, 2,..., s; i = 1, 2,..., n} – матрицы параметров.
Алгебраизованная форма представления – результат представления дифференциальных уравнений в полученных после дискретизации точках в алгебраизированном виде с помощью формул численного интегрирования.
|
|
|
ММ есть система алгебраических уравнений вида  ,
,
где значения переменных соответствуют значениям в момент времени tn. Вид матрицы Якоби Яn и вектора правых частей Вn определяется выбранным методом алгебраизации. Для получения ММ системы в алгебраизованной форме реализуют одну из неявных разностных формул численного интегрирования в общем виде:

где Vn – значение векторов в момент времени tn, n – номер шага интегрирования, ηn – коэффициент зависящий от выбранного метода интегрирования и значения шага, μn – вектор зависящий от значения векторов V на предыдущих шагах.
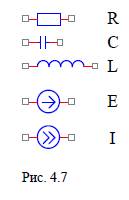
В физически однородных устройствах СУ (подсистемах) различают три типа простых элементов: емкостного типа С, индуктивного типа L и резистивного типа R. В каждой из подсистем используются специфические системы обозначений элементов на эквивалентных схемах.
В дальнейшем будем использоваться единую система обозначений для элементов всех подсистем, обычно применяемую при изображении электрических эквивалентных схем. При этом элементы представляют собой двухполюсники (рис. 4.7) C, R, L, E, I.
|
|
|
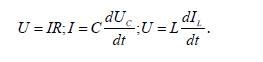
Ветви типа E соответствует компонентное уравнение E = f(Z), где в качестве Z могут фигурировать время, фазовые переменные или константа, E – разность переменных типа потенциалов для узлов этой ветви. Ветви типа I соответствует компонентное уравнение I = f(Z), где в качестве Z могут фигурировать время, фазовые переменные или константа, I – переменная типа потока. Компонентные уравнения ветвей типа R, C, L соответственно:
Таким образом, если при моделировании СУ на уровне устройств нужно отобразить только топологические связи элементов устройств СУ, то достаточно использовать графы, если нужно отобразить топологию и функционирование устройств СУ, то целесообразно использовать эквивалентные схемы.
Общий алгоритм составления эквивалентных схем имеет следующие этапы:
- выделение в СУ однородных физических подсистем;
- составление эквивалентных схем однородных подсистем без учета их взаимовлияния;
- установление связей между подсистемами.
Проектировщик в эквивалентной схеме отражает те элементы и свойства реального объекта, которые, по его мнению, оказывают существенное влияние на функционирование объекта. Чем можно пренебречь, ему подсказывают опыт и интуиция, так как процедура составления эквивалентной схемы не полностью формализована.
|
|
|
Таким образом, рассмотренные ММ могут служить для решения задач в процессе проектирования устройств, соответствующих различным классам СУ: нелинейным и линейным, нестационарным и стационарным, непрерывным и дискретным.
Дата добавления: 2019-11-25; просмотров: 211; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!