Связи, заменив их механическое действие на тело силами реакций связей.
Как уже говорилось, начнём с рассмотрения вопросов равновесия материальных тел, под которым (не вдаваясь пока в подробности) будем понимать состояние покоя тела по отношению к какому либо другому телу, например, по отношению к Земле.
Основные определения и аксиомы статики
В статике изучаются условия равновесия и методы преобразования одних силовых систем в другие, эквивалентные данным.
Определение 1.
Множество приложенных к телу сил называется системой сил.
Определение 2.
Две системы сил называются эквивалентными, если приложение каждой из них к одному и тому же покоящемуся свободному твёрдому телу приводит к одному и тому же движению:
Определение 3.
Система сил, под действием которой свободное твёрдое тело может оставаться в покое, называется уравновешенной или эквивалентной нулю:
Определение 4.
Если система сил эквивалентна одной силе, то эта сила называется равнодействующей системы сил:
Аксиомы устанавливают простейшие правила действия над силами и системами сил.
Аксиома 1.
Две силы, приложенные в одной точке тела, эквивалентны одной силе, приложенной в той же точке и равной геометрической сумме этих сил
(Рис. 1.3).

| 
| |||
| Рис. 1.3 | Рис. 1.4 |
Аксиома 2.
Не изменяя действия системы сил на тело, к ней можно добавить или от неё отнять уравновешенную систему сил.
Аксиома 3.
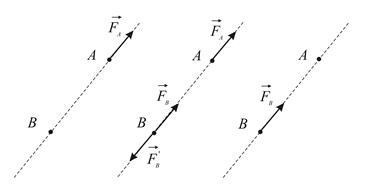
Система двух сил, приложенных к абсолютно твёрдому телу, эквивалентна нулю тогда и только тогда, когда эти силы равны по модулю и действуют по одной прямой в противоположные стороны (Рис. 1.4).
Сформулированные аксиомы позволяют рассматривать систему сил, приложенную к абсолютно твёрдому телу, как систему скользящих векторов. В самом деле, аксиома 1 позволяет рассматривать силу как вектор. Покажем, что это вектор скользящий.
|
| Рис.1.5 |
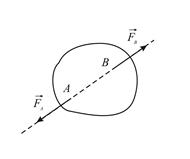
Пусть в точке A абсолютно твёрдого тела приложена сила  . Выберем на линии действия силы любую точку B, в которой приложим силы
. Выберем на линии действия силы любую точку B, в которой приложим силы  и
и  (Рис.1.5), причём
(Рис.1.5), причём  . На основании аксиом 1 и 2 получаем:
. На основании аксиом 1 и 2 получаем:  так как
так как  Но силы и
Но силы и  также образуют уравновешенную систему сил и, следовательно, могут быть отброшены.
также образуют уравновешенную систему сил и, следовательно, могут быть отброшены.
Таким образом,
Не изменяя действия силы на абсолютно твёрдое тело, силу можно переносить в любую точку её линии действия.
Момент силы относительно точки
Представим себе, что у некоторого тела закреплена одна точка. Сила, приложенная к такому телу, пытается повернуть тело вокруг оси, проходящей через закреплённую точку перпендикулярно плоскости, содержащей эту точку и линию действия силы. Причём вращательный эффект силы зависит не только от её модуля, но и от того как она приложена по отношению к закреплённой точке.
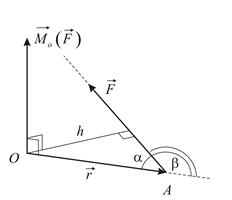
Введём величину, характеризующую описанное явление. Пусть задана сила  , приложенная в точке A абсолютно твёрдого тела и некоторый центр O (Рис. 1.6).
, приложенная в точке A абсолютно твёрдого тела и некоторый центр O (Рис. 1.6).
Моментом силы относительно точки называется вектор, равный векторному произведению радиуса-вектора, проведённого из данного центра в точку приложения силы, и этой силы:

|
| Рис.1.6 |
Из определения следует, что момент силы относительно точки расположен перпендикулярно плоскости, содержащей силу и точку, относительно которой вычисляется момент, причём, направлен в ту сторону, откуда поворот тела вокруг точки под действием силы виден против хода часовой стрелки. Модуль момента равен произведению модуля силы на кратчайшее расстояние от точки до линии действия силы (плечо силы):

Вектор момента обычно изображают приложенным в той точке, относительно которой он вычисляется.
Проведём через точку  , относительно которой вычисляется момент силы, какую-либо ось.
, относительно которой вычисляется момент силы, какую-либо ось.
Дата добавления: 2019-09-02; просмотров: 266; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!