Тактические характеристики РЛС
Тактические характеристики РЛС – это система показателей, используемых для оценки боевых возможностей РЛС и проведения тактических расчетов.
Основным тактическими характеристиками являются:
форма и размеры ЗО;
состав выдаваемой информации;
точность измерения координат целей;
разрешающие способности по измеряемым координатам;
информационная способность;
помехозащищенность;
эксплуатационная надежность;
мобильность;
живучесть
Технические характеристики РЛС
Технические характеристики РЛС должны быть направлены на выполнение тактических требований, т. е. являются основой обеспечения боевых возможностей.
Передающие устройства генерируют высокочастотный зондирующий сигнал и характеризуются следующими техническими данными:
Средняя мощность генерируемого сигнала – это усредненная за период повторения мощность СВЧ-сигнала.
Импульсная мощность генерируемого сигнала – это средняя в течение импульса мощность сигнала, отдаваемая передатчиком в антенну
Длительность генерируемого сигнала– это время, в течение которого генератор вырабатывает энергию СВЧ.
Частота повторения сигнала – величина, показывающая количество импульсных посылок энергии СВЧ вырабатываемых передатчиком в единицу времени.
47. Потенциальная точность измерения РЛС по координатам
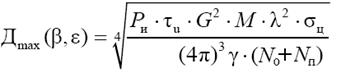
Точность измерения координат целей (наклонной дальности Д, азимута β, угла места ε или высоты H) является одной из важнейших характеристик РЛС, определяющих ее возможности при решении задач целеуказания активным родам войск (ЗРВ и ИА) и наведение своих истребителей
|
|
|
ИЗМЕРЕНИЕ НАКЛОННОЙ ДАЛЬНОСТИ ДО ЦЕЛИ
Определение наклонной дальности Дн до цели импульсным методом основывается на измерении времени распространения радиоволн от РЛС до цели и обратно, т. е. фиксации моментов излучения зондирующего сигнала и приема отраженного сигнала и измерения временного интервала между этими моментами. Скорость распространения радиоволн принимается постоянной и равной 3*105 км/с , а их траектория – прямолинейной
ОБЕСПЕЧЕНИЕ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ. Принципиально для измерения дальности достаточно, чтобы зондирующий сигнал представлял собой одиночный импульс.
ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ. Измерение дальности основано на частотной модуляции непрерывного излучаемого сигнала
ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ Оноснован на измерении разности фаз импульсных непрерывных синусоидальных колебаний и принятых эхо-сигналов. Основная трудность применения фазового метода – преодоление неоднозначности измерения разности фаз, поскольку фазометрическое устройство позволяет измерять фазовые сдвиги только в пределах от 0 до2π
|
|
|
ИЗМЕРЕНИЕ АЗИМУТА ЦЕЛИ
Для измерения азимута в большинстве РЛС РТВ применяется амплитудная пеленгация путем анализа огибающей пачечного сигнала на максимум. Амплитудная пеленгация в радиолокации базируется на использовании высоконаправленных антенн, обеспечивающих высокую разрешающую способность по угловым координатам (азимуту) и необходимую дальность действия
48. Виды ошибок при измерении координат, их влияние на точность
Как правило, при обнаружении устанавливается факт наличия цели и производится грубая оценка ее координат. На одной из последующих стадий обработки сигналов производится более точная оценка координат. Ошибки измерений разделяются на грубые, систематические и случайные.
Грубые ошибки — результат грубого просчета оператора или следствие возникшей в аппаратуре неисправности. Такие погрешности значительно больше остальных ошибок в данном ряду измерений, и поэтому они легко выявляются еще на этапе обнаружения целей.
Систематические ошибки вызываются длительно действующими факторами, например, задержкой сигнала в целях РЛС или несовершенством метода измерений. Такие ошибки в той или иной мере компенсируются калибровкой аппаратуры.
|
|
|
Случайные ошибки зависят от случайных обстоятельств, которые не поддаются предварительному учету.
Среднее значение случайных ошибок х равно сумме произведений ошибок, точнее, средних значений интервалов Δхi , на их частоту пх /n
Площадь под кривой распределения, выражающая суммарную вероятность ошибок, равна единице. Эта сумма распределяется непрерывно по всем значениям случайных ошибок.
Наиболее сложно компенсировать случайные погрешности, для чего необходимо увеличивать количество измерений, отношение сигнала к шуму и выбирать соответствующий вид зондирующего сигнала.
49. Виды зондирующих сигналов и их основные параметры.
-непрерывные немодулированные;
-непрерывные амплитудно-модулированные;
-непрерывные частотно-модулированные;
-импульсные.
Основными параметрами зондирующих радиоимпульсов являются:
- длина волны l (частота несущего колебания f = с/l);
- импульсная мощность Ри = Рср ·Т/tи;
- длительность импульса tи;
- частота (период) повторения импульсов Fп (Тп = 1/ Fп);
|
|
|
- ширина спектра радиоимпульса Δf0 (Пи).
50. Виды зондирующих сигналов
В радиолокационных станциях применяются различные виды зондирующих сигналов:
-непрерывные немодулированные;
-непрерывные амплитудно-модулированные;
-непрерывные частотно-модулированные;
-импульсные.
Выбор того или иного вида зондирующего сигнала зависит от характера решаемых РЛС задач и условий ее функционирования. В РЛС РТВ, как, впрочем, и в большинстве РЛС иного назначения, применяются импульсные зондирующие сигналы. Это связано с тем, что их применение позволяет обеспечить простоту измерения дальности до цели.
Основными параметрами зондирующих радиоимпульсов являются:
- длина волны l (частота несущего колебания f = с/l);
- импульсная мощность Ри = Рср •Т/tи;
- длительность импульса tи;
- частота (период) повторения импульсов Fп (Тп = 1/ Fп);
- ширина спектра радиоимпульса Δf0 (Пи).
51. Структура сигналов ЛЧМ и ФКМ.
В линейно частотно модулированном (ЛЧМ) сигнале частота изменяется с начальной f0 до f0 ± Δf, то есть частота может как линейно нарастать, так и уменьшаться.
ФКМ радиоимпульс состоит из ряда примыкающих друг к другу прямоугольных парциальных радиоимпульсов, имеющих одинаковую длительность (τo) и частоту, а начальные фазы φ изменяются по определенному закону.
Наибольшее распространение получили фазокодоманипулированные сигналы (ФКМ), которые составлены на основе двоичных кодов: Баркера, М- кодов и т.д
52. Диапазоны радиолокационных сигналов.
Важным фактором при выборе диапазона длин волн является характер отражения радиоволн от целей. Если размеры цели и радиусы кривизны от- дельных ее участков много меньше длины волны, то сильнее сказывается яв- ление дифракции волн, интенсивность отражения мала. При этом цель можно уподобить антенне с очень малой действующей высотой. Учитывая размеры реальных целей, приходим к выводу, что для того, чтобы длина волны была много меньше этих размеров или соизмерима с ними, в радиолокации необходимо использовать диапазон ультракоротких волн (УКВ). Другая причина использования этого диапазона, особенно волн более коротких, чем метровые, связана с размерами антенн. Дело в том, что угловая ширина ДНА независимо от ее типа прямо пропорциональна длине волны и обратно пропорциональна соответствующему размеру. Для зеркальной антенны в виде усеченного параболоида ширина луча по точкам половинного значения мощности
Θ0,5 = 65λ dA , (1.1)
где λ – длина волны, a dA – максимальный линейный размер зеркала в плоскости луча. Например, при λ = 3 см для получения ширины луча Θ0,5 = 3° требуется dA = 65 см, а чтобы луч имел такую ширину при длине волны λ = 3 м, размер зерка- ла dA должен составлять 65 м. При выборе диапазона волн важное значение имеют особенности распро- странения радиоволн в атмосфере, в частности, резонансное поглощение (на- пример, для кислорода на частоте 60 ГГц поглощение составляет около 14 дБ/км), что вынуждает избегать применения соответствующих частот.
53. Достоинства и недостатки сантиметрового диапазона.
- Распространяются практически только в пределах прямой видимости.
- Используются специальные остронаправленные антенны: параболические, рупорные и др.
- Для волн короче 1,5 см начинают проявляться процессы молекулярного поглощения электромагнитного поля.
54. Активные помехи и их классификация.
Активные помехи создаются специальными приёмо-передающими или передающими радиоустройствами — станциями или передатчиками радиопомех, пассивные — различными искусственными отражателями радиоволн. По характеру воздействия активные Р. п. делят на маскирующие и имитирующие (дезориентирующие). Маскирующие помехи создаются хаотическими, шумовыми сигналами, среди которых трудно выделить сигналы, полученные от объектов; имитирующие — сигналами, похожими на сигналы от объектов, но содержащими ложную информацию. Активные маскирующие помехи часто имеют вид радиочастотных колебаний, модулированных шумами, или шумовых колебаний, подобных собственным шумам РЛ приёмника. В зависимости от ширины частотного спектра их подразделяют на прицельные, имеющие ширину спектра, соизмеримую с полосой пропускания РЛ приёмника, и заградительные, «перекрывающие» определённый участок радиочастотного диапазона. Активные помехи могут также иметь вид зондирующих РЛ сигналов, модулированных по амплитуде, частоте, фазе, времени задержки или поляризации (их формируют из зондирующих сигналов, принимаемых на станции помех). Такие помехи называются ответными, они могут быть как имитирующими, так и маскирующими.
55. Пассивные помехи и их классификация
Пассивные помехи отображаются на экране индикатора РЛС в виде отдельных точек или же целых засвеченных областей. При этом отражения от местных предметов (МП) в основном отображаются в ближней зоне работы станции (до 50…80 км). При наличии явления сверхрефракции возможно появление на экранах индикаторов РЛС отражений от местных предметов, находящихся за линией радиогоризонта. Интенсивность пассивных помех, образованных отражениями от местных предметов, зависит от расстояния до источников отражения, характера подстилающей поверхности, метеоусловий и т.д.
Отражения от метеообразований наблюдаются на экране индикатора РЛС в виде засвеченных областей неопределенной формы, находящихся от станции на достаточно большом расстоянии.
Отражения от точечных источников (так называемые "ангел-эхо") наблюдаются на экране индикатора РЛС в виде отдельных отметок. При этом количество таких отметок может быть весьма значительным.
Искусственные пассивные помехи создают самолеты, сбрасывая пачки дипольных отражателей (ДО) с высот 5-10 км с темпом 0,5-2 пачки на 100 м пути, обеспечивающих sпп ³ 50-150 м2. Самолеты ТА могут нести до нескольких сотен пачек ДО, самолеты СА и РЭБ – до нескольких тысяч пачек.
Пассивные помехи от сбрасываемых пачек наблюдаются на экране индикатора РЛС в виде отдельных отметок на маршруте полета постановщика помех, которые со временем расплываются и создают единое облако засвета.
Время развития облака пассивных помех составляет единицы-десятки минут, время существования – от 0,5 ч до нескольких часов. Раскрытие пачек ДО после сброса занимает 10-30 с, поэтому самолет-постановщик наблюдается впереди создаваемого им облака.
Пассивные помехи (ПП). КЛАССИФИКАЦИЯ
Источниками ПП могут быть:
- участки земной поверхности – горы, сопки и т.д.:
- искусственные сооружения – вышки, здания, мосты и т.д.;
- облака гидрометеообразований, турбулентности атмосферы;
- облака искусственных металлических (металлизированных) отражателей – диполей, лент – либо специальных аэрозолей;
- пылевые облака, поднятые смерчами и пылевыми бурями, вулканическим извержением, наземными и поземными ядерными взрывами,
- крупные скопления птиц, насекомых;
- искусственно ионизированные области;
- ложные цели.
56. Влияние активных помех на зону обнаружения РЛС.
При достаточно большом динамическом диапазоне приемника шумовые колебания создают эффект, аналогичный резкому увеличению внутреннего шума, что затрудняет обнаружение и измерение параметров радиолокационного сигнала при больших дальностях до цели. Очень мощные активные помехи, как и взаимные, могут воздействовать по побочным каналам приема.
По мере увеличения интенсивности помех может произойти полное подавление сигнала. Поэтому воздействие маскирующей помехи при малом динамическом диапазоне приемника особенно опасно. Но даже и при очень большом динамическом диапазоне приемника воздействие помехи может значительно ухудшить или полностью помешать обнаружению или сопровождению цели.
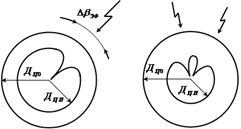
Рис. Изменение ЗО РЛС при воздействии одного
или нескольких постановщиков активных помех.
Количественно изменение зоны обнаружения РЛС при воздействии шумовых помех характеризуют коэффициентом сжатия КД(β) и шириной сектора эффективного подавления ΔβЭФ
Коэффициент сжатия КД(β)= ДЦП/ДЦО – это отношение дальности обнаружения цели при воздействии внешних помех на РЛС к дальности обнаружения этой же цели без воздействия активных помех (высота полета фиксирована).
Сектор эффективного подавления ΔβЭФ – это сектор в направлении на источник помех, в пределах которого обнаружение цели невозможно. Он измеряется в градусах и определяется в основном шириной главного лепестка ДНА.
Активная шумовая помеха (АШП) на экранах РЛС засвечивает часть экрана ИКО, скрывая отметки от целей и утомляя глаза оператора неясным и неустойчивым изображением. Если мощность передатчика помех относительно невелика, то действие помехи на РЛС будет сказываться только тогда, когда антенна станции направлена на передатчик помех. На ИКО эта помеха проявится в виде узкого засвеченного сектора. Ширина сектора будет примерно равна ширине диаграммы направленности РЛС.
При приближении к точке стояния РЛС передатчика помех (или его увеличении мощности) ширина сектора засвета на экране РЛС увеличивается. При этом ИКО будут появляться засветы от боковых лепестков. При дальнейшем приближении (увеличении мощности) передатчика помех – ИКО РЛС будет засвечен полностью и может наступить такой момент, когда на экране пропадет какая либо информация за исключением масштабных отметок. Это означает, что приемный тракт РЛС перегружен активными помехами и получить информацию на его выходе невозможно.
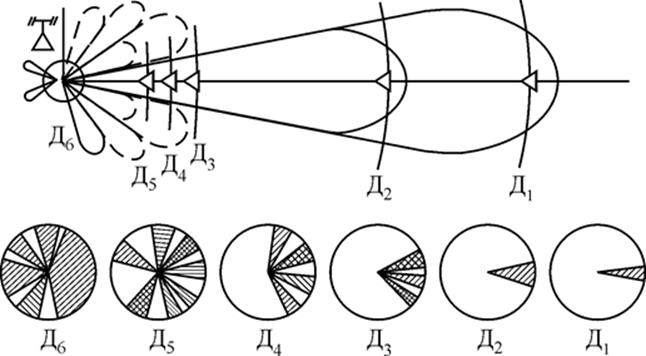
Рис. Вид засветов на ИКО в зависимости от приближения ПАП к РЛС
Несинхронная импульсная помеха (НИП) наблюдаются на экранах РЛС и ПРВ в виде засвеченных секторов, кругов и спиралей. Она так же, как и АШП, мешает и утомляет оператора РЛС.
57 Методы защиты от активных помех.
Для обеспечения помехозащищенности РЛС от АШП можно использовать:
Метод "силовой" борьбы, предусматривающий увеличение плотности потока мощности, излучаемой РЛС в заданную область пространства.
Метод «силовой» борьбы обеспечивает снижение коэффициента сжатия – К сж Метод направлен на повышение отношения сигнал/помеха на выходе приемного устройства (а следовательно, на увеличение дальности обнаружения цели в шумовых помехах) за счет увеличения энергии зондирующего сигнала ЭИ=РИ τИ MП, повышения ее концентрации в пространстве в районе цели – увеличение коэффициента усиления антенны на излучение G и повышение его энергии при приеме – увеличение коэффициента усиления антенны на приём А. . Он не преследует цели ослабления помехи на входе приемного устройства или в трактах обработки.
Метод пространственной селекции, предусматривающий создание условий, затрудняющих постановку АШП по основному лепестку ДН приемной антенны, и снижение уровня приема помеховых колебаний, воздействующих по боковым лепесткам ДНА.
Улучшение пространственной селекции является важнейшим способом защиты РЛС от активных помех всех видов. Оно достигается за счет сужения главного лепестка и уменьшения уровня боковых лепестков диаграммы направленности антенны, в результате чего обеспечивается сужение сектора эффективного подавления и уменьшение коэффициента сжатия зоны обнаружения РЛС.
3 Метод поляризационной селекции, предусматривающий использование поляризационных различий сигналов и помех.
В настоящее время применяются помехи с равномерной эллиптической (круговой) или наклонной под 45° к горизонту линейной поляризацией. Такие помехи воздействуют на РЛС с любой поляризацией зондирующего сигнала. Несовершенство помех с такими видами поляризации состоит в том, что горизонтальная и вертикальная составляющие их вектора поляризации коррелированны между собой, т.е. жестко связаны по амплитуде и фазе, следовательно, могут быть взаимно скомпенсированы с помощью поляризационного автокомпенсатора, если в РЛС предусмотреть их раздельный прием.
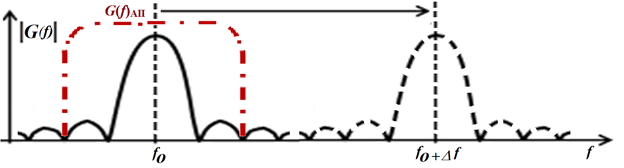
Метод частотной селекции, предусматривающий создание условий, снижающих эффективность или затрудняющих применение противником прицельных по частоте помех.
Этот метод будет эффективным в тех случаях, когда ширина спектра зондирующего сигнала по крайней мере соизмерима с шириной спектра АШП. Несущая частота зондирующего сигнала должна меняться в диапазоне Δf ˃ G(f)АП. Изменение несущей частоты fО по заранее заданному, случайному или квазислучайному законам от группы к группе импульсов, либо от импульса к импульсу.
Перечисленные методы защиты эффективными только при достаточно большом динамическом диапазоне тракта приема и обработки сигналов.
Для создания большого (требуемого) динамического диапазона в приемных трактах РЛС используются автоматические регулировки усиления:
- временная автоматическая регулировка усиления (ВАРУ);
- быстродействующая автоматическая регулировка усиления (БАРУ);
- мгновенная автоматическая регулировка усиления (МАРУ);
- шумовая автоматическая регулировка усиления (ШАРУ);
- шумовая временная автоматическая регулировка усиления (ШВАРУ).
58. Влияние пассивных помех на обнаружение целей.
Пассивные помехи отображаются на экране индикатора РЛС в виде отдельных точек или же целых засвеченных областей. При этом отражения от местных предметов (МП) в основном отображаются в ближней зоне работы станции (до 50…80 км). При наличии явления сверхрефракции возможно появление на экранах индикаторов РЛС отражений от местных предметов, находящихся за линией радиогоризонта. Интенсивность пассивных помех, образованных отражениями от местных предметов, зависит от расстояния до источников отражения, характера подстилающей поверхности, метеоусловий и т.д.
Отражения от метеообразований наблюдаются на экране индикатора РЛС в виде засвеченных областей неопределенной формы, находящихся от станции на достаточно большом расстоянии. Отражения от точечных источников (так называемые "ангел-эхо") наблюдаются на экране индикатора РЛС в виде отдельных отметок. При этом количество таких отметок может быть весьма значительным. Искусственные пассивные помехи создают самолеты, сбрасывая пачки дипольных отражателей (ДО) с высот 5-10 км с темпом 0,5-2 пачки на 100 м пути, обеспечивающих sпп ³ 50-150 м2. Самолеты ТА могут нести до нескольких сотен пачек ДО, самолеты СА и РЭБ – до нескольких тысяч пачек.
Пассивные помехи от сбрасываемых пачек наблюдаются на экране индикатора РЛС в виде отдельных отметок на маршруте полета постановщика помех, которые со временем расплываются и создают единое облако засвета. Время развития облака пассивных помех составляет единицы-десятки минут, время существования – от 0,5 ч до нескольких часов. Раскрытие пачек ДО после сброса занимает 10-30 с, поэтому самолет-постановщик наблюдается впереди создаваемого им облака.
59. Методы защиты от пассивных помех.
Физическими основами защиты РЛС от пассивных помех (ПП) являются различия в параметрах полезных и мешающих сигналов.
В РЛС РТВ основные методы защиты от ПП используют скоростные (частотные) отличия цели и помехи. Абсолютное большинство аэродинамических целей характеризуется высокой скоростью движения. Следовательно, спектр отраженного от таких объектов сигнала смещается по частотной оси относительно спектра зондирующего сигнала (ЗС) на величину доплеровской добавки Fд= 2Vr/l, где Vr –радиальная скорость цели, l – длина волны ЗС.
ПП собственной радиальной скорости не имеет и может лишь незначительно перемещаться под действием ветра, ее доплеровская добавка близка к нулю. Методы защиты от ПП, основанные скоростных (частотных) отличий цели и помехи, называются когерентными, а аппаратура, решающая задачи на основе этих методов – когерентной.
Поляризационная селекция применяется для выделения сигналов на фоне отражений от гидрометеоров и облаков дипольных отражателей. Для ослабления отражений от гидрометеоров целесообразно применение волны с круговой поляризацией, так как в этом случае отраженная волна также имеет круговую поляризацию, но противоположного направления вращения вектора электрического поля, вследствие чего она оказывается несогласованной по поляризации с антенной, работающей в режиме приема. Для ослабления отражений от облаков дипольных отражателей целесообразно применение волны с горизонтальной поляризацией, так как дипольные отражатели преимущественно имеют вертикальную поляризацию.
Примечание: При использовании аппаратуры защиты от ПП следует помнить, что при этом в РЛС снижается дальность обнаружения целей на 10 – 15%. Поэтому, включение защиты от ПП необходимо только в тех зонах воздушного пространства, где обнаружение и проводка воздушных объектов из-за засветов на экранах индикаторов от ПП невозможна. Зоны засвета выделяются стробами, в которых включается режим защиты от ПП. При этом – засветы от местных предметов помещаются в строб «Местные», в котором не вводится поправка действия ветра на ПП. Засветы от дипольных помех помещаются в стробы «Дипольные», в которых для большей эффективности подавления ПП можно вводить поправку на действие ветра.
60. Назначение антенно-фидерной системы и РПУ.
Антенно-фидерная система
Антенно-фидерные устройства РЛС предназначены для передачи электромагнитной энергии зондирующих сигналов от передатчика к антенне, направленного излучения ее в пространство, направленного приема отраженных эхо-сигналов и передачи их энергии на вход приемника.
Основными элементами антенно-фидерных устройств РЛС являются линии передачи высокочастотной энергии и антенная система.
Функции передачи энергии от передатчика к антенне и от антенны к приемнику выполняет линии передачи высокочастотной энергии – фидеры
РПУ (Радиопередающие устройства)
Радиопередающее устройство (РПУ) является одной из основных составных частей РЛС и предназначено для формирования электромагнитных колебаний (локационных зондирующих сигналов) с заданными техническими характеристиками.
Выбор структуры построения радиопередающего устройства определяется общими тактико-техническими требованиями, предъявляемыми к РЛС.
В зависимости от целевого назначения РЛС и вида зондирующего сигнала РПУ строят по двум основным схемам:
-однокаскадныеРПУ ("мощный автогенератор");
-многокаскадные РПУ ("задающий генератор-усилитель мощности").
РПУ первого типа – «мощный автогенератор»
Распространенность, до недавнего времени, однокаскадных радиопередатчиков в радиолокационных станциях объясняется:
- во-первых, существовавшими ранее трудностями усиления колебаний СВЧ диапазона;
- во-вторых, рядом достоинств, которыми обладают однокаскадные радиопередатчики.
Это, прежде всего, простота схемного решения и конструктивного исполнения, малый вес и габариты, небольшая стоимость, простота и малые эксплуатационные расходы, при малых значениях τи высокое разрешение сочетается с однозначной селекцией целей по дальности.
Основные недостатки:
- нельзя одновременно получить высокое разрешение по дальности и скорости, высокое разрешение по дальности и большую дальность обнаружения;
- плохая скрытность из-за сравнительно высокой спектральной плотности мощности при одинаковых с другими сигналами значениях длительности τии пиковых мощностей Ри;
- при однокаскадном построении мощных импульсных РПУ основные трудности возникают при реализации требований к стабильности частоты. Поэтому в РЛС с однокаскадным РПУ обязательной является система автоматической подстройки частоты (АПЧ).
- в однокаскадном РПУ ограничены возможности осуществления внутриимпульсной модуляции генерируемых колебаний по частоте и фазе.
Наиболее важными элементами однокаскадного радиопередающего устройства (РПУ с мощным автогенератором) являются импульсный модулятор и автогенератор.
РПУ второго типа – «задающий генератор-усилитель мощности»
Высокие требования к стабильности несущей частоты зондирующих сигналов, необходимость генерирования сложных и когерентных сигналов привели к появлению передающих устройств, выполненных по многокаскадной схеме. В качестве первого каскада используются маломощные задающие генераторы (возбудители), а качестве последующих – многокаскадный усилитель мощности. Количество каскадов усиления мощности зависит от требуемой энергии зондирующих сигналов.
Разработка многокаскадных РПУ оказалась возможной благодаря созданию мощных усилительных ЭВП: пролетных клистронов, ЛБВ, амплитронов и др.
Во всех типах РПУ «Задающий генератор – усилитель мощности» стабильность частоты зондирующего сигнала определяется в основном маломощным задающим генератором (ЗГ), частоты которых стабилизируются известными методами, например с помощью кварца. Возбудитель может быть выполнен по схеме, позволяющей осуществлять быстрое, в течение нескольких микросекунд, переключение с одной рабочей частоты на другую. Кроме того, с помощью возбудителя формируются сложные широкополосные сигналы с внутриимпульсной модуляцией (частотно-модулированные зондирующие сигналы).
61 Назначение РПрУ и АПЧ
Система АПЧ служит для стабилизации разности частот генератора и гетеродина приемника, равной поминальному значению промежуточной частоты приемника. Система АПЧ устраняет погрешности в установке частот генератора при перестройке, автоматически компенсирует уход частоты под влиянием температуры и влажности, а также вследствие вращения антенны и других дестабилизирующих факторов. Система АПЧ работает по принципу двухканальной подстройки частоты генератора двумя исполнительными органами (грубо и точно).
РПУ представляет собой одноламповый генератор высокой частоты с импульсной анодной модуляцией. Генератор собран по схеме однотактного двухконтурного автогенератора с общей сеткой на импульсном триоде. Модулятор предназначен для формирования мощных модулирующих импульсов напряжения положительной полярности с заданной частотой повторения и длительностью, поступающих на генераторную лампу передающего устройства. Модуля- тор включает в себя схему формирования модулирующих импульсов и канал поджигающих импульсов. В качестве накопителя энергии применяется искусственная линия, а в качестве коммутирующего прибора – тиратрон.
62 Назначение системы вращения и качания антенного устройства.
Системы вращения антенн (СВА) предназначены для осуществления обзора пространства в горизонтальной плоскости с заданными параметрами зоны обзора и программой. Эти системы обеспечивают как круговое вращение антенны с узким в горизонтальной плоскости лучом в пределах 0-360, так и программное управление антенной в секторе, а также установку антенны на заданный азимут.
Различные условия боевой обстановки (обнаружение РЛС низколетящих, высотных, малоразмерных и маневрирующих целей в простых условиях или в условиях активных и пассивных помех) требуют применения гибких методов обзора пространства, изменения скорости вращения, остановки антенны на заданном направлении или попеременное изменение направления сканирования в заданном секторе.
В связи с этим в РЛС РТВ используются следующие основные режимы работы СВА:
круговое вращение с постоянной заданной скоростью;
установка антенны на заданный азимут;
сканирование в заданном азимутальном секторе.
Системы вращения и наклона антенн предназначены для осуществления обзора пространства в горизонтальной плоскости с заданными пара- метрами зоны обзора. Различные условия боевой обстановки (обнаружение РЛС низколетящих, высотных, малоразмерных и маневрирующих целей в простых условиях или в условиях активных и пассивных помех) требуют применения гибких методов обзора пространства, изменения скорости вращения, остановки антенны на заданном направлении или изменения направления сканирования в заданном секторе
63 Назначение индикаторного устройства и аппаратуры синхронизации.
Индикаторное устройство включает в себя ИКО, ВИКО и ИК (блок 56). ИКО предназначены для визуального наблюдения за отображением воздушной обстановки, считывания координат ВО (наклонной дальности и азимута) и определения государственной принадлежности ВО в зоне обзора станции по сигналам от НРЗ.
Координаты считываются с экранов ИКО, ВИКО (блок 10) и выдаются голосом или передаются полуавтоматически с помощью электронного визира (азимут) и маркера (наклонная дальность) при целеуказании. В состав ИКО входят: блок горизонтальной развертки (блок 7), блок вертикальной развертки (блок 8), видеоусилитель (блок 9), блок электронно-лучевой трубки (ЭЛТ) – блок 10, блок эхо-сигналов (блок 19), блок сигналов изображения (блок 25) и калибратор (блок 18). Также в ИКО преду- смотрено три масштаба дальности. Отметки дальности формируются в блоке 18. ВИКО может устанавливаться для работы в аппаратной машине или на выносном посту, удаленном от РЛС до 500 м. Кроме радиально-круговой развертки (РКР) на ВИКО имеется визирная развертка, используемая для полуавтоматической выдачи целеуказаний по азимуту и дальности.
64. Назначение СУЗИК и электропитания.
СУЗиК
Система управления, защиты и контроля (СУЗиК) предназначена для управления режимами работы РЛС и сигнализации о включенных режимах. Система состоит из аппаратного пульта управления (АПУ) – блоков 11М, 12М и выносного пульта управления (ВПУ) – блоков 22М, 23М, с которых производится управление работой станции.
Электропитание
В качестве первичного источника питания РЛС используются дизельные электроагрегаты мощностью 10 кВт, установленные в прицепах ПС-1 и ПС-2, или промышленная сеть 220/380 В, 50 Гц с изолированной или заземленной нейтралью. Напряжение промышленной сети подается через прицеп ПС-1 на разделительный трансформатор (блок 38). Переключение питания РЛС от электроагрегатов или сети производится на силовом щите (блок 44), установленном в силовом прицепе ПС-1. При работе РЛС на высоте более 1 000 м над уровнем моря или при повышенной ветровой нагрузке на антенну электропитание РЛС обеспечивается двумя агрегатами, работающими параллельно. Питание устройств и блоков РЛС осуществляется постоянными и переменными (стабилизированными или нестабилизированными) напряжениями, вырабатываемыми вторичными источниками питания. В станции предусмотрен «Дежурный режим», при котором включен только накал электровакуумных приборов (ЭВП) блоков 47, 50, 104.
65. Характеристики боевых возможностей РЛС.
Основные тактические характеристики РЛС.
Все характеристики радиолокационных станций можно подразделить на тактические и технические.
Тактические характеристики РЛС
- максимальная дальность обнаружения целей;
- зона обзора РЛС и ее параметры;
- разрешающие способности по дальности и угловым координатам;
- точность определения координат целей;
- информационная способность;
- помехозащищенность;
- эксплуатационная надежность и мобильность.
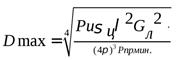
Максимальная дальность обнаружения РЛС является основной характеристикой. Она зависит от технических параметров станции, эффективной отражающей поверхности цели и определяется формулой
 (2.1)
(2.1)
где;
Dмакс — максимальная наклонная дальность обнаружения целей;
Pи — импульсная мощность передатчика РЛС, кВт;
σ — эффективная отражаются поверхность цели, м2;
λ — длина рабочей волны, м;
Gл — коэффициент усиления антенны;
Рпр.мин — чувствительность приемника, Вт.
Из величин, входящих в формулу, видно, что дальность обнаружения тем больше, чем больше импульсная мощность передатчика, коэффициент усиления антенны, эффективная отражающая поверхность цели, длина рабочей волны и чем выше чувствительность приемника.
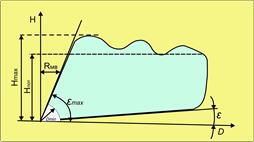
Рис. 3.1. Зона обнаружения РЛС.
Зоной обзора РЛС называется часть воздушного пространства, в пределах которого РЛС может обнаруживать цели с заданной вероятностью и измерять их координаты с заданной точностью. Она зависит от формы диаграммы направленности антенны, пределов работы РЛС по азимуту и углу места цели.
Радиолокаторы-дальномеры работают, как правило, в круговом режиме, а по углу места цели предел работы ограничивается шириной диаграммы направленности антенны в вертикальной плоскости и пределами наклона при качании по углу места цели.
Разрешающие способности радиолокатора характеризуют его возможность обеспечить раздельное наблюдение и измерение координат двух близко находящихся одна от другой целей. Различают разрешающие способности РЛС (рис. 3.2) по дальности, азимуту и углу места цели.
Рис. 3.2. Разрешающая способность РЛС.
Разрешающая способность по дальности — это наименьшее расстояние между двумя целями, находящимися на одном азимуте, при котором еще возможно раздельное измерение дальности каждой цели.
Разрешающая способность по азимуту — это наименьший угол в горизонтальной плоскости, между двумя целями, находящимися на одинаковой дальности и на одинаковых высотах, при котором еще возможно раздельное измерение азимута каждой целя.
Она зависит главным образом от ширины диаграммы направленности в горизонтальной плоскости. Чем уже диаграмма направленности, тем выше разрешающая способность по азимуту.
Разрешающая способность РЛС по углу места цели — это наименьший угол в вертикальной плоскости между двумя целями, находящимися на одном азимуте и одной дальности, при котором еще возможно измерение угла места каждой цели.
Она зависит в основном от ширины диаграммы направленности антенны в вертикальной плоскости.
Точность определения координат целей характеризуется разностью между истинными координатами цели и координатами этой цели, определенными радиолокационной станцией.
Об этой точности судят по величине ошибок измерения координат. Эти ошибки зависят от точности настройки блоков РЛС, ориентирования и считывания координат, целей оператором с экранов индикаторов.
Информационная способность РЛС — это количество одновременно сопровождаемых целей, по которым выдается информация с заданной дискретностью. Она зависит от количества индикаторов, с которых производится съем координат, способа съема информации (ручного, полуавтоматического, автоматического).
Мобильность — это возможность РЛС передислоцироваться на новую позицию. Она определяется временем развертывания (свертывания), скоростью передвижения, проходимостью, запасом хода.
66. Модуляторы РПУ, принцип работы и их классификация.
Модулятор
- это функциональный узел обеспечивающий усиление сигнала возбудителя и ввод в него заданного закона модуляции или его части (например, модулятор обеспечивает изменение частоты сигнала, а преобразование непрерывного сигнала в импульсный осуществляется в последующих каскадах РПУ). Основными факторами, влияющими на выбор схемы модулятора для конкретного РПУ, являются: требуемый закон или законы модуляции ЗС, требования к стабильности частоты передатчика, возможности РПУ по перестройке частоты.
Модулятор обеспечивает изменение частоты сигнала, а преобразование непрерывного сигнала в импульсный осуществляется в последующих каскадах РПУ. Реализован на пролетном многорезонаторном клистроне.
Модуляторы собираются по двум схемам:
- с полным разрядом накопителя (искусственной линии);
- с частичным разрядом накопителя (искусственной линии).
Общий принцип работы модулятора заключается в медленном накоплении энергии на протяжении паузы между импульсами запуска и быстрой реализации накопленной энергии в определённые временные интервалы. Энергия накапливается в искусственной линии, основным элементом которой являются высоковольтные конденсаторы. Разряд искусственной линии осуществляется через специальный коммутирующий элемент.
В модуляторах с полным разрядом накопителя конденсаторы накопительной линии полностью разряжаются на нагрузке. В качестве коммутирующего элемента в таких модуляторах может использоваться тиратрон – специальный стеклянный или керамический триод, внутри которого находится газ. С приходом импульса запуска газ внутри тиратрона ионизируется – «поджигается». Сопротивление тиратрона становится равным 0 и конденсаторы накопительной линии начинают разряжаться через тиратрон на нагрузке – первичной обмотке импульсного трансформатора. Тиратрон «горит» до момента полного разряда конденсаторов накопительной линии.
По окончанию разряда тиратрон «тухнет», его сопротивление становится очень большим, конденсаторы накопительной линии начинают заряжаться. С приходом очередного импульса запуска цикл повторяется.
В модуляторах с частичным разрядом накопителя происходят те же процессы, только время разряда определяется временем длительности модулирующего импульса, который приходит на управляющий электрод коммутирующего элемента. В качестве коммутирующего элемента в таких модуляторах используется мощный электровакуумный триод или лучевой тетрод. Время разряда конденсаторов накопительной линии определяется длительностью открытого состояния коммутирующего элемента – длительностью импульса на управляющем электроде.
В результате мощность в импульсе значительно превышает мощность первичного источника питания – Римп = Рср ·Tп/ τи .
67. РПрУ, классификация и основные характеристики.
По диапазону рабочих волн различают приемные устройства, работающие во всех освоенных частотных диапазонах. По схемному построению приемные устройства бывают трех типов: детекторные; прямого усиления; супергетеродинные.

К основным характеристикам радиоприемных устройств относятся:
- чувствительность; Под чувствительностью РПрУ РЛС понимается минимальный сигнал РПРmin, наводимый в антенне, при котором на выходе приемного устройства будет обнаружен этот сигнал с заданными вероятностями правильного обнаружения Д и ложной тревоги F.
- коэффициент шума; Коэффицент шума приемника – это число, показывающее во сколько раз отношение сигнал-шум на выходе РПрУ меньше, чем отношение сигнал-шум на его входе
- избирательность; Избирательностью РПрУ называется его способность выделять полезный сигнал из смеси сигналов и помех.
- помехозащищенность; Помехозащищенность – способность приемника выделять полезные сигналы на фоне помех.
- уровень сигнала на выходе; Уровень сигнала на выходе (выходная мощность Р сВЫХ) приемника определяется свойствами оконечного устройства.
- динамический диапазон; Диапазон уровней входных сигналов, при котором обеспечивается обнаружение этих сигналов с заданными показателями качества
- диапазон принимаемых частот; Диапазон принимаемых частот – это совокупность частот Δf = f0 max - f0 min, на которые может настроиться приемник, сохраняя в заданных пределах свои технические параметры.
- стабильность характеристик; Характеризуется отношением отклонения величин параметров приёмника к их номинальному значению и выражается в процентах.
- потребление энергии. Величина, равная произведению питающего напряжения и потребляемого тока приёмным устройством и измеряются в Ваттах.
68. Принципы построения антенно-фидерных систем РЛС.
Основными элементами антенно-фидерных устройств РЛС являются линии передачи высокочастотной энергии (фидеры)и антенная система (выполняет функцию направленного излучения и направленного приема электромагнитной энергии)
Конструкция фидеров определяется длиной волны, величиной передаваемой мощности, схемными и конструктивными особенностями тракта. В РЛС применяются следующие типы фидеров – двухпроводные и коаксиальные линии, волноводы. В РЛС метрового диапазона – коаксиальные линии с диэлектрическим заполнением. В РЛС дециметрового диапазона используются жесткие коаксиальные линии с воздушным заполнением. В РЛС сантиметрового диапазона фидеры выполняются на прямоугольных волноводах, поперечные размеры которых должны обеспечивать заданный диапазон и уровень передаваемой мощности.
Двухпроводные линии передачи, состоящие из двух параллельных проводников, используются в метровом диапазоне волн.
Коаксиальная линия состоит из двух соосно расположенных проводников – внутреннего и внешнего (Коаксиальные линии широко используются для передачи высокочастотных колебаний в дециметровом диапазоне волн. В отличие от открытой двухпроводной линии, коаксиальный фидер не излучает, так как электромагнитное поле в нем заключено внутри металлической трубы. Коаксиальныелинии бывают воздушные, жесткой конструкции, и заполненные диэлектриком с гибкими проводниками (кабели).
69. Основные параметры антенных устройств.
Основными параметрами антенных устройств являются:
- коэффициент усиления антенн; G характеризует степень выигрыша по мощности с учетом направленных свойств антенны и наличия в ней потерь. Антенны современных РЛС имеют коэффициент усиления от нескольких сотен до десятков тысяч.
- форма ДНА; Форма ДНА существенно влияет на точность и разрешающую способность по угловым координатам, помехозащищенность. Форма ДНА в вертикальной плоскости определяет степень рациональности распределения излучаемой энергии по углу места. Правильно выбранная форма ДНА в этой плоскости позволяет сократить энергетические затраты при обеспечении заданной дальности обнаружения.
- уровень боковых лепестков; влияет на интенсивность принимаемых активных и пассивных помех и тем самым определяет помехозащищенность РЛС.
- диапазон излучаемых и принимаемых сигналов; определяется полосой частот, в пределах которой основные параметры антенны не выходят за пределы допустимых значений.
- поляризация излучаемых и принимаемых сигналов. влияет на интенсивность мешающих отражений от земной или водной поверхности.
70. Антенные переключатели, назначение и принцип работы.
Антенные переключатели применяют в импульсных РЛС, имеющих общую антенну для передачи и приема. Они служат для автоматического переключения антенны с выхода передатчика к входу приемник. Передатчик РЛС генерирует импульсы с мощностью от сотен киловатт до нескольких мегаватт.
Из входной секция подаются на вход коммутатора мощные зондирующие радиоимпульсы от передающего устройства далее щелевой мост делит высокочастотные сигналы между своими плечами пополам и передает этот сигнал фазами.
Ферритовый мост передает высокочастотный сигнал в каждый из своих волноводов с изменением фазы в соответствии с внешним магнитным полем.
Фазосдвигающая секция передает высокочастотного сигналы в двух волноводах с изменением фазы в одном волноводе относительно другого на 90°.
Выходная секция предназначена передает мощный зондирующий радиоимпульс на антенное устройство либо на эквивалент антенны.
71. Принцип работы индикатора кругового обзора (ИКО)
На электронно-лучевую трубку подаются:
- напряжения или токи для создания разверток (растра);
- видеосигналы с выхода приемника;
- импульсы масштабных отметок;
- сигналы формирования подвижного электронного маркера;
- сигналы коммутации для изменения режимов работы;
- напряжения, обеспечивающие исходный режим работы.
В соответствии с этим индикатор на ЭЛТ должен включать следующие основные устройства, которые часто называют каналами:
-канал формирования разверток;
-канал сигналов;
-канал формирования электронного маркера;
-канал коммутации;
-устройство управления режимом работы трубки;
-канал масштабных меток по D, β, h.
Для получения изображения на экране ИКО должен быть создан полярный растр, называемый радиально-круговой разверткой (РКР) электронного пучка. Если используются ЭЛТ с магнитным управлением, то необходимо создавать однородное отклоняющее магнитное поле.
Для поворота и изменения напряженности магнитного поля на практике применяются следующие способы:
1. Способ вращающихся отклоняющих катушек (ОК), питаемых током неизменной амплитуды
2. Способ неподвижных ОК (двух пар и более), питаемых током изменяющейся амплитуды
72. Принцип работы индикатора высоты.
Для получения изображения на экране индикатора высоты должен быть созданы в зависимости от режима работы индикаторов 2 вида растров – полярный (режим «Дальность-высота») или прямоугольный (режим «Дальность-угол места»)
Полярный растр на индикаторе создаётся быстрым отклонение луча как по горизонтали, так и по вертикали.
Для отображения развёртки, положение которой будет соответствовать углу места положения антенны, на систему отклонения по вертикали подаётся напряжения с датчика угла места. Датчик механически соединён с антенной и с него снимается напряжение, пропорциональное sinε угла места антенны
73. Назначение наземных радиолокационных запросчиков (НРЗ), их классификация.
Система государственного радиолокационного опознавания (РЛО) «свой-чужой» предназначена для определения государственной принадлежности объектов, обнаруженных РЛС, по принципу «свой-чужой» и получения информации об индивидуальных признаках своих объектов (индивидуальное опознавание ИО)
Наземные радиолокационные запросчики (НРЗ-П) делятся по варианту выполнения и по мощности передающего устройства.
По варианту выполнения: стационарные – устанавливаются в стационарном здании РЛС, имеют собственную антенную систему; возимые (выполненные в прицепе) – антенна устанавливается на крыше прицепа; самоходные (выполненные в кузове автомобиля УРАЛ или КАМАЗ) - антенна устанавливается на крыше кузова. В данном исполнении в кузове размещаются также два агрегата питания типа АБ-8М; встроенные – встраиваются в аппаратуру РЛС, элементы антенной системы НРЗ конструктивно
По мощности : большой мощности – Ри =5,6 ÷ 18 кВт; средней мощности – Ри =1,5 ÷ 5,6 кВт; малой мощности – Ри = 0,7 ÷ 1,5 кВт
74. Режимы опознавания, характеристика каждого.
I режим (ОО) – режим общего неимитостойкого опознавания. Реализуется в III и VII диапазонах волн.
II режим (ГО) – режим общего имитостойкого опознавания (гарантированное опознавание). Реализуется в VII диапазоне волн с использованием изделия 6110;
III режим (ИО) – режим индивидуального опознавания по принципу "Где - ты?" Реализуется в III и VII диапазонах волн без использования аппаратуры ИО-4М.
Режимы IV и VI могут быть использованы при наличии дополнительной аппаратуры ИО-4М (рис.6).
Режим IV – режим индивидуального опознавания по принципу "Где - ты?" или "Кто - ты?". В этом режиме можно определить местонахождение воздушного объекта по индивидуальному .
Режим VI обеспечивает получение полетной информации о высоте и запасе топлива.
К дополнительным режимам опознавания относятся:
- смена линии опознавания "Самолет-Корабль" (С-К);
- контрольное опознавание К1, К2 в III диапазоне волн;
- прием сигнала "Бедствие", производится в I режиме IIIд и I, II режимах VIIд;
- прием сигнала "Тревога" от воздушных объектов, терпящих бедствие, производится в VIIд при выключенном запросе. Индикация световая.
К режимам, реализуемым аппаратурой сопряжения, относятся:
"Снятие" – используется для снятия с экрана ИКО эхо-сигналов и сигналов опознавания от воздушных объектов, отвечающих сигналом общего опознавания;
"Регламентация" – ограничение по времени включения НРЗ на ПДУ.
Дата добавления: 2019-07-17; просмотров: 1226; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!