Аппроксимация переходной характеристики объекта по управляющему каналу
Согласно заданным в таблице1 экспериментальным точкам строится экспериментальная характеристика переходного процесса. Исследуемый объект – двухканальный (канал: u-y и канал: f-y) по каналу регулирования (u-y) является объектом с самовыравниванием (рис.2). Объекты с самовыравниванием аппроксимируют передаточными функциями с введением звена запаздывания.

Рис. 2. Переходная характеристика ОУ с самовыравниванием
 , (1.1)
, (1.1)
где:
Коб – коэффициент передачи;
t - время запаздывания;
То – постоянная времени.
Простейшим частным случаем оператора (1.1), имеющим в инженерной практике наибольшее применение, является передаточная функция вида:
 . (1.2)
. (1.2)
Для определения параметров объекта по управляющему каналу проведём касательную к экспериментальной переходной характеристике в точке перегиба, которая имеет координатами (tп; h(tп)). Далее определяем параметры передаточной функции по управляющему каналу (приложение 1):
Коб = hуст = 0,55; tо = 1,9с; То = 10,5с; h(tп) = 0,12; tп = 4с
Подставляя эти параметры в формулу (1.2), получаем первую математическую модель ОУ:


Более точную аппроксимацию переходной функции ОУ дает передаточная функция вида:
 (1.3)
(1.3)
Её оригинал имеет вид:
 (1.4)
(1.4)
Задача математического описания в этом случае заключается в поиске таких Та1, Та2 и  , при которых кривая (1.4) максимально приближается к истинной экспериментальной кривой. Записывая аналитические выражения критерия приближения, получаем уравнения для выбора этих параметров. Для упрощения расчётов, в литературе предложена номограмма:
, при которых кривая (1.4) максимально приближается к истинной экспериментальной кривой. Записывая аналитические выражения критерия приближения, получаем уравнения для выбора этих параметров. Для упрощения расчётов, в литературе предложена номограмма:
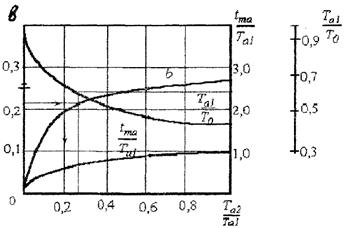
Рис. 3. Номограмма для определения параметров передаточных функций
По номограмме (рис.3.) можно найти  ,
,  по известным
по известным  и
и  . По известному значению находим значение
. По известному значению находим значение  , после чего определяем
, после чего определяем  ,
,  и, следовательно:
и, следовательно:




Подставляя рассчитанные значения в формулу (1.3), получаем вторую математическую модель ОУ:
Третью модель определяем по методу Лукаса:
 ,
,
где  ;
;

Таким образом, получили третью математическую модель ОУ:
Далее с помощью программы «СС» на ЭВМ строим переходные процессы полученных функций и наносим их на график с экспериментальной характеристикой (приложение 1).
Вычислим погрешности аппроксимации полученных передаточных функций по интегральному критерию по формуле:

где:
 - аппроксимирующая переходная характеристика;
- аппроксимирующая переходная характеристика;
 - заданная переходная характеристика.
- заданная переходная характеристика.

Выбираем передаточную функцию, имеющую наименьшую погрешность аппроксимации:
 (1.5)
(1.5)
Аппроксимация переходной характеристики объекта по возмущающему каналу
Исследуемый объект по возмущающему каналу также является объектом с самовыравниванием (рис.2.). Поэтому первая аппроксимирующая передаточная функция примет форму оператора (1.1).
Проведём касательную к экспериментальной переходной характеристике в точке перегиба с координатами (tп; h(tп)) (приложение 2.). Определим параметры передаточной функции:
Коб = hуст = 0,28; tо = 3,1с; То = 9с; h(tп) = 0,06; tп = 5с
Получили передаточную функцию первой модели для возмущающего канала:
Далее для нахождения передаточной функции второй модели (1.3) как и в предыдущем пункте по номограмме (рис.3) находим:




Подставляя рассчитанные значения в формулу (1.3), получаем вторую математическую модель ОУ:
Для нахождения передаточной функции по методу Лукаса определяем следующие коэффициенты:
 ;
;

Таким образом, получили третью передаточную функцию для возмущающего канала:
Находим погрешности аппроксимации по интегральному критерию:
Выше представленные расчёты показывают, что наименьшую погрешность аппроксимации даёт третья модель, следовательно, она наилучшим образом аппроксимирует экспериментальную характеристику.

Дата добавления: 2019-07-17; просмотров: 272; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!