Типова структура модульного МК
Кафедра схемотехніки радіоелектронних систем
ОБЧИСЛЮВАЛЬНА ТЕХНІКА ТА МІКРОПРОЦЕСОРИ
напрям підготовки 0924 «Телекомунікації»
Мікропроцесорні системи.
Контролери в телекомунікаціях.
Мікроконтролери CISC архітектури.
Полтава – 2006
Навчальна література:
1. Мікропроцесорна техніка: Підручник/ Ю.І. Якименко та інш. – К.: ІВЦ Політехніка; Кондор, 2004. с. 323-352.
2. Схемотехніка електронних систем: У з кн. Кн. 3. Мікропроцесори та мікро контролери: Підручник/ В.І. Бойко, А.М. Гуржій, В.Я. Жуйков та ін. – 2-е вид. – К: Вища шк., 2004. – 399 с.
ВСТУП
У дійсний час діапазон застосування мікропроцесорної техніки постійно поширюється, до МПС різноманітного призначення типів пред'являються самі різні вимоги. Тому сформувалося кілька типів МПС, що розрізняються потужністю, універсальністю, швидкодією і структурними відмінностями. Основні типи МПС наступні:
- МК – найбільш простий тип МПС, у яких всі або більшість вузлів системи (процесор, пам’ять даних і програм, програмовані інтерфейси) виконані у вигляді однієї великої інтегральної мікросхеми (ВІС). Системна шина МК «схована» від користувача усередині мікросхеми. Можливості підключення зовнішніх пристроїв до МК обмежені. МК – це пристрої, що практично завжди використовуються не самі по собі, а в складі більш складних пристроїв (наприклад, контролерів). Пристрої на МК звичайно призначені для рішення однієї конкретної задачі або обмеженого кола задач – як правило, керування і регулювання;
|
|
|
- контролери – керуючі МПС, звичайно будуються на основі МК; створюються для рішення якоїсь окремої задачі або групи близьких задач. Структура контролера проста й оптимизована для досягнення максимальної швидкодії. Конструктивно контролери випускаються в одноплатному (модульному) виконанні.
- мікрокомп'ютери – більш потужні МПС з розвитими засобами сполучення з зовнішніми пристроями. Вони відрізняються від контролерів більш відкритою структурою, допускають підключення до системної шини декількох додаткових пристроїв. Мікрокомп'ютери можуть маті засоби збереження інформації на магнітних носіях і засоби зв'язку з користувачем (монітор, клавіатура). Мікрокомп'ютер розрахований на вирішення широкого кола задач, але до нової задачі його треба «пристосовувати» заново;
- комп'ютери – найбільш універсальні МПС. Вони обов'язково передбачають можливість модернізації, а також широкі можливості підключення нових пристроїв. Їхня системна шина звичайно доступна користувачеві. Крім того, зовнішні пристрої можуть підключатися до комп'ютера через кілька вбудованих портів зв'язку. Комп'ютер завжди має розвинуті засоби: зв'язку з користувачем, збереження інформації великого обсягу, зв'язку з іншими комп'ютерами.
|
|
|
Будь-яку задачу в принципі можна виконати за допомогою кожного з перерахованих типів МПС. Але при виборі типу МПС необхідно, з одного боку, уникнути надмірності, з другого – забезпечити необхідну для даної задачі гнучкість системи.
В дійсний час при розробці нових МПС найчастіше вибирають шлях використання МК (приблизно в 80% випадків). Однокристальні МК (ОМК) є зручним інструментом для створення сучасних вбудованих пристроїв керування різним обладнанням, наприклад, автомобільною електронікою, побутовою технікою, мобільними телефонами тощо.
Класичні МПС на базі мікросхем мікропроцесорних комплектів випускаються зараз досить рідко, через складність розробки і налагодження цих систем. Даний тип МПС вибирають в основному тоді, коли МК не можуть забезпечити необхідних характеристик.
Загальні відомості про МК
Класифікація і загальні архітектурні риси МК
Основні вимоги, що споживачі пред'являють до ОМК можна сформулювати в такий спосіб:
- низька вартість,
- висока надійність,
- високий ступінь мініатюризації,
|
|
|
- мале енергоспоживання,
- працездатність у жорстких умовах експлуатації;
- достатня продуктивність для виконання всіх необхідних функцій.
Виконання всіх цих суперечливих умов одночасно важко, тому розвиток і удосконалення ОМК пішло шляхом спеціалізації, і в даний час кількість моделей ОМК надзвичайно велика. Однак можна виділити деякі архітектурні риси, які є загальними практично для всіх сучасних МК:
- система команд ОМК зорієнтована на виконання задач керування і регулювання;
- алгоритми, що реалізуються на ОМК, мають багато розгалужень залежно від зовнішніх сигналів (подій);
- дані, з якими оперують ОМК, мають невелику розрядність;
- універсальність і можливість розширення функцій керування значно нижчі, ніж у системах з МП;
- інтеграція в одному корпусі мікросхеми (на одному кристалі) практично всіх блоків МПС – ПЗП, ОЗП, пристроїв введення-виведення, тактового генератора, контролера переривань і т.д. Тому в вітчизняної літературі МК часто називають однокристальними ЕОМ.
- побудова більшості МК на основі гарвардської архітектури (використання роздільних областей пам’яті та шин для збереження і передавання даних та команд).
|
|
|
Взагалі, сучасні МК, як і інші МПС, будуються на основі однієї з двох базових архітектур: фон-нейманівської або гарвардської.
В архітектурі фон-Неймана використання єдиної області пам'яті дозволяє оперативно перерозподіляти ресурси між областями програм і даних, що істотно підвищує гнучкість МПС із точки зору розроблювача програмного забезпечення. Розміщення стека в загальній пам'яті полегшує доступ до його вмісту. Невипадково тому фон-нейманівська архітектура стала основною архітектурою універсальних комп'ютерів.
Гарвардська архітектура майже не використовувалася до кінця 70-х років, поки виробники МК не зрозуміли, що вона дає суттєві переваги розроблювачам систем керування.
Справа в тому, що для реалізації більшості алгоритмів керування такі переваги фон-нейманівської архітектури як гнучкість і універсальність не мають великого значення. Аналіз реальних програм керування показав, що необхідний обсяг пам'яті даних МК, використовуваний для збереження проміжних результатів, як правило, на порядок менше необхідного обсягу пам'яті програм. У цих умовах використання єдиного адресного простору приводить до збільшення формату команд за рахунок збільшення числа розрядів для адресації операндів. Застосування окремої, невеликої за обсягом пам'яті даних сприяло скороченню довжини команд і прискоренню пошуку інформації в пам'яті даних.
Гарвардська архітектура забезпечує потенційно більш високу швидкість виконання програми в порівнянні з фон-нейманівською за рахунок паралельної реалізації деяких операцій. Наприклад, вибірка наступної команди може відбуватися одночасно з вибіркою операндів для виконанням попередньої, і немає необхідності «зупиняти» АЛП процесора на час вибірки команди. Це надає можливость забезпечувати виконання різних команд за однакове число тактів.
Однак, гарвардська архітектура є недостатньо гнучкою для реалізації деяких програмних процедур. Тому порівняння МК, виконаних на основі різних архітектур, варто проводити стосовно до конкретних задач.
МК звичайно класифікують по розрядності оброблюваних чисел:
- чотирирозрядні – найпростіші і найдешевші;
- восьмирозрядні – найбільш чисельна група, що забезпечує оптимальне співвідношення вартості і можливостей; до цієї групи відносяться МК серії MCS-51 (Intel) і сумісні з ними, PIC (MicroChip), HC68 (Motorola), Z8 (Zilog) та ін.;
- шістнадцатирозрядні – MCS-96 (Іntel) та ін. – більш високопродуктивні;
- тридцатидворозрядні – звичайно є модифікаціями універсальних мікропроцесорів, використовуються для вирішення найбільш складних задач (наприклад, адаптивного керування).
Найбільш розповсюджені у дійсний час восьмирозрядні ОМК, широко використовувані в промисловості, побутовій і комп'ютерній техніці. Причиною життєздатності 8-розрядних МК є використання їх для керування реальними об'єктами, де застосовуються, в основному, алгоритми з переважно логічними (побітовими) операціями, швидкість виконання яких практично не залежить від розрядності процесора.
Сучасні 8-розрядні МК мають наступні особливості:
- модульна організація, при якій на базі одного процесорного ядра проектується ряд (лінійка) МК, що розрізняються обсягом і типом пам'яті програм, обсягом пам'яті даних, набором периферійних модулів, частотою синхронізації;
- використання закритої архітектури МК. Тобто МК являє собою закінчену систему обробки даних, нарощування можливостей якої з використанням паралельних магістралей адреси і даних не передбачається;
- використання типових функціональних периферійних модулів (таймери, процесори подій, контролери послідовних інтерфейсів, АЦП й ін.), що мають незначні відмінності в алгоритмах роботи в МК різних виробників;
- декілька режимів функціонування периферійних модулів, що задаються в процесі ініціалізації регістрів спеціальних функцій МК.
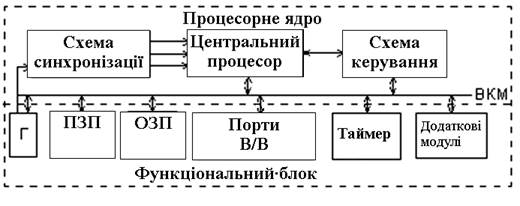
Типова структура модульного МК
При модульному принципі побудови всі МК одного сімейства містять процесорне ядро, однакове для всіх МК даного сімейства, і змінюваний функціональний блок, що відрізняє МК різних моделей. Структура модульного МК подана на рис. 1.
| |
Процесорне ядро містить у собі:
· центральний процесор;
· внутрішню контролерную магістраль (ВКМ) у складі шин адреси, даних і керування;
· схему синхронізації МК;
· схему керування режимами роботи МК.
Змінюваний функціональний блок містить у собі модулі пам'яті різного типу й обсягу, порти введення/виведення, модулі тактових генераторів (Г), таймери. У відносно простих МК модуль обробки переривань входить до складу процесорного ядра. У більш складних МК він являє собою окремий модуль з розвиненими можливостями. До складу змінюваного функціонального блоку можуть входити і такі додаткові модулі, як компаратори напруги, АЦП і інші. Кожен модуль проектується для роботи в складі МК з урахуванням протоколу ВКМ. Даний підхід дозволяє створювати різноманітні МК у межах одного сімейства.
Процесорне ядро сучасних 8-розрядних МК може бути побудовано на основі CISC- архітектури (повна система команд -- Complicated Instruction Set Computer), або RISC-архітектури (скорочена система команд -- Reduced Instruction Set Computer).
CISC-процесори виконують великий набір різноманітних команд, даючи розроблювачеві можливість вибрати найбільше підходящу команду для виконання необхідної операції. Вибірка команди на виконання здійснюється побайтно протягом декількох циклів роботи МК. Час виконання команди може складати від 1 до 12 циклів. До МК із CISC-архітектурою відносяться МК фірми Intel з ядром MCS-51, що підтримуються в даний час великою кількістю виробників.
Схема синхронізації МК забезпечує формування сигналів синхронізації, необхідних для виконання командних циклів центрального процесора та мітки часу, які необхідні для роботи таймерів МК. Вона звичайно будується на основі дільників частоти опорної імпульсної послідовності. Сучасні МК містять вбудовані тактові генератори, але практично всі МК допускають роботу від зовнішнього джерела сигналу з метою завдання довільної тактової частоти МК.
У МК використовується три основних види пам'яті:
Пам'ять програм являє собою ПЗП, призначену для збереження програм і констант.
Пам'ять даних призначена для збереження змінних у процесі виконання програми і являє собою, як правило, статичне ОЗП. Термін «статичне» означає, що вміст комірок ОЗП зберігається при зниженні тактової частоти МК до як завгодно малих значень.
Регістри МК – внутрішні регістри процесора (акумулятор, регістри стану, індексні регістри) і регістри, що служать для керування периферійними пристроями (регістри спеціальних функцій).
Обсяг пам'яті даних МК, як правило, невеликий і складає звичайно десятки і сотні байт. Цю обставину необхідно враховувати при розробці програм для МК.
Незважаючи на існуючу тенденцію переходу до закритої архітектури МК, у деяких випадках виникає необхідність підключення додаткової зовнішньої пам'яті. Для цього використовуються порти введення-виведення. Такий спосіб дозволяє уникнути реалізації складних шинних інтерфейсів, однак приводить до зниження швидкодії системи при звертанні до зовнішньої пам'яті.
Кожен МК має декілька паралельних портів введення-виведення, які виконують роль пристроїв часового узгодження функціонування МК і об'єкта керування, що у загальному випадку працюють асинхронно. Звертання до регістра даних порту здійснюється тими ж командами, що і звертання до пам'яті даних. Крім того, у багатьох МК окремі розряди портів можуть бути опитані або встановлені бітовими командами процесора.
Більшість задач керування, що реалізуються за допомогою МК, виконуються у реальному часі. Під цим розуміється здатність системи одержати інформацію про стан керованого об'єкта, виконати необхідні розрахункові процедури і видати керуючі впливи (сигнали) на протязі інтервалу часу, достатнього для бажаної зміни стану об'єкта.
Покладати функції керування в реальному масштабі часу тільки на центральний процесор неефективно, тому що це займає ресурси, необхідні для розрахункових процедур. Тому в більшості сучасних МК використовується апаратна підтримка роботи в реальному часі з використанням таймерів.
Модулі таймерів служать для прийому інформації про час настання тих або інших подій від зовнішніх датчиків подій, а також для формування керуючих впливів у часі. Таймер – це 8-ми або 16-розрядний лічильник зі схемою керування. Схемотехнікою МК передбачається можливість використання таймера в режимі лічильника зовнішніх подій, тому його часто називають таймером/лічильником. Напрямок рахування – тільки прямий, тобто при надходженні вхідних імпульсів вміст лічильника інкрементується (збільшується на одиницю).
Лічильник може використовувати, у якості джерела вхідних сигналів як імпульсну послідовність з виходу керованого дільника частоти fBUS, так і сигнали зовнішніх подій. У першому випадку говорять, що лічильник працює в режимі таймера, у другому – у режимі лічильника подій.
Наступним етапом розвитку модулів підсистеми реального часу МК стали модулі процесорів подій. Вперше модулі процесорів подій були використані компанією Intel у МК сімейства 8x51Fx. Цей модуль одержав назву програмувального лічильного масиву (Programmable Counter Array — PCA). Він забезпечує більш широкі можливості роботи в реальному масштабі часу і меньше витрачає ресурси центрального процесора, чим таймери/лічильники. Тенденція розвитку підсистеми реального часу сучасних МК – збільшення числа каналів процесорів подій і розширенні їхніх функціональних можливостей.
Обробка переривань у МК відбувається відповідно до загальних принципів обробки переривань у МПС. Модуль переривань приймає запит переривання і організує перехід до виконання програми, що перериває. Запити переривань можуть надходити як від зовнішніх джерел, так і від джерел, розташованих у різних внутрішніх модулях МК (зовнішні та внутрішні переривання). Як входи для прийому запитів зовнішніх переривань найчастіше використовуються виводи паралельних портів.
Адреса, що завантажується в програмний лічильник при переході до обробки переривання, називається «вектор переривання». Питання про пріоритети при одночасному надходженні декількох запитів на переривання вирішується в різних МК по-різному. Є МК з однорівневою системою пріоритетів (усі запити рівноцінні), багаторівневою системою з фіксованими пріоритетами і багаторівневою програмованою системою пріоритетів.
Сучасні МК надають користувачеві великі можливості в плані економії енергоспоживання і мають наступні режими роботи:
- активний режим (Run mode) — основний режим роботи МК. У цьому режимі МК виконує робочу програму, і всі його ресурси доступні. Споживана потужність має максимальне значення PRUN.
- режим очікування (Wait mode, Idle mode або Halt mode). У цьому режимі припиняє роботу центральний процесор, але продовжують функціонувати периферійні модулі, що контролюють стан об'єкта керування. При необхідності сигнали від периферійних модулів переводять МК в активний режим, і робоча програма формує необхідні керуючі впливи. У режимі очікування потужність споживання МК знижується в порівнянні з активним режимом у 5...10 разів;
- режим останова (Stop mode, Sleep mode або Power Down mode). У цьому режимі припиняє роботу як центральний процесор, так і більшість периферійних модулів. Перехід МК зі стану останова в робочий режим можливий, як правило, тільки за перериваннями від зовнішніх джерел або після подачі сигналу скидання. У режимі останова потужність споживання МК PSTOP знижується в порівнянні з активним режимом приблизно на три порядки і складає одиниці мікроват.
З метою забезпечення надійного запуску, контролю роботи МК і відновлення працездатності системи (автоматічного скидання і ініціалізації) всі сучасні МК забезпечуються апаратними засобами забезпечення надійної роботи, а саме: схемою формування сигналу скидання МК, модулем моніторингу напруги живлення та сторожовим таймером.
2. Базова архітектура CISC МК.
В дійсний час, серед усіх 8-розрядних МК, сімейство MCS51 є безсумнівним чемпіоном з кількості різновидів і кількості компаній, що випускають його модифікації. Воно одержало свою назву від першого представника цього сімейства -- МК і8051, випущеного в 1980. Вдалий набір периферійних пристроїв, можливість гнучкого вибору зовнішньої або внутрішньої програмної пам'яті і невисока вартість забезпечили цьому МК успіх на ринку. З погляду технології МК і8051 був для свого часу дуже складним виробом -- у кристалі було використано 128 тис. транзисторів, що в 4 рази перевищувало кількість транзисторів у 16-розрядному мікропроцесорі 8086.
Важливу роль у досягненні такої високої популярності сімейства 8051 зіграла відкрита політика фірми Intel, спрямована на широке поширення ліцензій на ядро 8051 серед великої кількості провідних компаній - виробників світу.
У результаті на сьогоднішній день існує більш 200 модифікацій МК сімейства 8051, що випускаються майже 20-ю компаніями. Ці модифікації містять у собі кристали з найширшим спектром периферії: від простих 20-вивідних пристроїв з одним таймером до 100-вивідних кристалів з 10-розрядними АЦП, масивами таймерів-лічильників, апаратними 16-розрядними помножувачами і 64 Кб програмної пам'яті на кристалі. Основними напрямками розвитку є: збільшення швидкодії (підвищення тактової частоти і вдосконалення архітектури), збільшення обсягу ОЗП і FLASH- пам'яті на кристалі з можливістю внутрісхемного програмування, використання складних периферійних пристроїв.
Усі МК із сімейства MCS-51 мають загальну систему команд. Наявність додаткового устаткування впливає тільки на кількість регістрів спеціального призначення.
Дата добавления: 2019-07-15; просмотров: 122; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!