Элементы теории систем фазового регулирования. Система фазовой автоподстройки частоты
Основные определения

Рис. П.1.1 Структурная схема системы фазовой автоподстройки частоты

Рис. П.1.2 Характеристика управления ГУН
Структурная схема системы ФАПЧ представлена на рис.П.1.1 Она состоит из фазового детектора (ФД), фильтра низкой частоты петли регулирования, управляемой системы (УС), включающей генератор, управляемый по частоте напряжением (ГУН), и управляющий элемент (УЭ).
Управляющий элемент предназначен для изменения частоты управляемого генератора.
Зависимость частоты генератора fг от уровня управляющего напряжения Uу называют характеристикой управления fг (Uу) (рис.П.1.2). Обычно используют линейный участок этой характеристики. Крутизна управления, или по-другому крутизна управителя, определяется по формуле Sу = Dfг / DUу и имеет размерность Гц/В.
Фазовый детектор (ФД) создает напряжение, определяемое разностью фаз j колебаний управляемого генератора jг и колебаний опорного генератора jо.
Зависимость напряжения Uд на выходе ФД от разности фаз сравниваемых сигналов j = jг - jо называют дискриминационной характеристикой фазового детектора Uд (j), а Sд = dUд/dj - крутизной дискриминационной характеристики, или по-другому крутизной дискриминатора, с размерностью В/Гц. Удобно пользоваться нормированной дискриминационной характеристикой
F (j) = Uд (j) /E,
где E - максимальное напряжение на выходе ФД, которое зависит от амплитуд сравниваемых сигналов и схемы ФД. F (j) - периодическая функция, изменяющая свое значение в пределах ±1.
Характеристика ФД может иметь синусоидальную, рис.П.1.3а, треугольную, рис.П.1.3б, а также знаковую, трапецеидальную или пилообразную формы в зависимости от схемы ФД.

Рис. П.1.3Нормированные характеристики ФД
Фильтр нижней частоты (ФНЧ) применяется для выделения полезной низкочастотной составляющей из сигнала на выходе фазового детектора. В петле ФАП для повышения порядка могут быть применены идеальный и неидеальный интегрирующие фильтры. Неидеально-интегрирующий фильтр характеризуется коэффициентом передачи K (p) = 1/ (1+pT), где T = R*C, рис.1.4а. Пропорционально-интегрирующий фильтр с неидеальным интегратором, рис.1.4б, имеет коэффициент передачи K (p) = (1 + p m T) / (1 + p T), где T = C* (R+R1), m = R1/ (R+R1). Коэффициент передачи пропорционально-интегрирующего фильтра с идеальным интегратором описывается выражением K (p) = ( (а + p) / p), где а - коэффициент передачи интегрирующей ветви.

Рис. П.1.4 Схемы неидеальных ФНЧ:
а) неидеальный интегрирующий фильтр;
б) неидеальный пропорционально-интегрирующий фильтр
Функционирование системы ФАП состоит в следующем. Гармонический сигнал с частотой wг и фазой jг с выхода управляемого генератора ФАП поступает на первый вход фазового детектора, на второй вход которого поступает входной гармонический сигнал от опорного генератора с частотой wо и фазой jо. Разность частот (fг - fо) = Δfн в начальный момент времени определяет начальную частотную расстройку Δfн системы ФАП. Амплитуда напряжения Uд на выходе ФД зависит от разности фаз сигналов на его входах. Полученное напряжение Uд, после низкочастотной фильтрации, поступает на управляющий элемент, который так изменяет частоту управляемого генератора ФАП, что бы его частота wг и частота wо стали равными, а разность фаз на выходе ФД постоянной. Для обеспечения режима захвата и последующего удержания крутизна дискриминатора Sд и крутизна управителя Sу должны быть противоположными по знаку.
Соответственно ФАП, как система автоматического регулирования, является адаптивным (следящим) фильтром, обеспечивающим фильтрацию входного сигнала путем изменения частоты ГУН сигналом управления, формируемого, в общем случае, на выходе фильтра петли ФАП, который подключен к выходу фазового детектора. Для ФАП 1 - го порядка фильтр петли ФАП отсутствует и Uу = Uд. В зависимости от параметров кольца система ФАП может работать как при постоянной так и при изменяющейся частотной расстройке между входным сигналом ФАП и сигналом ГУН.
В результате моделирования должны быть получены качественные и количественные характеристики системы ФАП: полоса захвата, полоса удержания, время вхождения в синхронизм, а также переходные процессы фазы и частоты в системе.
Если частоты управляемого и опорного генератора равны, а эффект медленных изменений параметров управляемого генератора, определяющих его частоту, в среднем полностью компенсируются действием ФАП, то говорят, что система работает в режиме удержания.
Если в среднем разность частот вырабатываемых генераторами сигналов равна нулю, а разность их фаз периодически меняется, то система ФАП находится в режимеквазисинхронизма. Это неблагоприятный режим для системы и поэтому при проектировании необходимо добиться того, чтобы он не возникал.
Если в системе происходит непрерывное нарастание разности фаз управляемого и опорного генераторов, то говорят, что система находится в режиме биений. Переходное состояние системы, при котором режим биений переходит в режим удержания или квазисинхронизма, называется режимом захвата.
Под полосой удержания Δfуд понимается область расстроек, при которой возможен режим удержания. Полоса захвата Δfз - это область начальных расстроек, в которой при любых начальных условиях устанавливается режим удержания или квазисинхронизма.
На практике полоса удержания Δfуд определяется путем медленного изменения в режиме синхронизма частоты опорного генератора как в сторону повышения, так и в сторону понижения, до моментов выхода системы ФАП из синхронизма. Разность найденных частот характеризует полосу удержания. Соответственно полоса захвата Δfз определяется по наступлению синхронизма системы ФАП при медленном изменении начальной расстройки Δfн от больших значений к малым путем изменения частоты опорного генератора. Для ФАП 1 - го порядка Δfз = Δfуд = SуE, причем для шумовых возмущений со стороны входа системы - линеризированная модель ФАП является эквивалентом RC - фильтру с постоянной времени t =1/ SдSуE, а установившаяся фазовая ошибка в режиме слежения jуст = arcsin (Δfн/ SуE). Для систем ФАП большего порядка полосы удержания и захвата не равны друг другу.
Элементы теории систем фазового регулирования. Система фазовой автоподстройки частоты
Система фазовой автоподстройки частоты состоит из трех основных элементов: перемножителя, инвариантного во времени линейного фильтра и управляемого генератора, рис. П.2.1.
Представим входной сигнал ФАП в виде  , соответственно сигнал управляемого генератора ФАП -
, соответственно сигнал управляемого генератора ФАП -  , где А и K1 - соответственно эффективные напряжения входного сигнала и сигнала генератора управляемого напряжением (ГУН), θ (t) - полная фаза входного сигнала, а θ' (t) - полная фаза сигнала ГУН, причем θ (t) = w0 t + θ1 (t) и θ' (t) = w0 t + θ2 (t), а θ1 (t) и θ2 (t) - составляющие полной фазы относительно линейной фазы.
, где А и K1 - соответственно эффективные напряжения входного сигнала и сигнала генератора управляемого напряжением (ГУН), θ (t) - полная фаза входного сигнала, а θ' (t) - полная фаза сигнала ГУН, причем θ (t) = w0 t + θ1 (t) и θ' (t) = w0 t + θ2 (t), а θ1 (t) и θ2 (t) - составляющие полной фазы относительно линейной фазы.
Еслu отключить управляющий сигнал е ( t) от управляемого генератора, то генератор даст синусоидальный сигнал постоянной частоты w0. После подключения управляющего сигнала частота генератора становится равной [w0 + K2e (t)], где K2 - коэффициент пропорциональности размерности радиан на секунду на вольт.
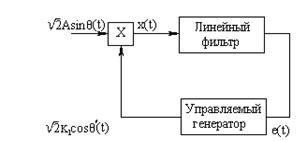
Рис. П.2.1 Система фазовой автоподстройки частоты
Таким образом, частота сигнала ГУН, определяемая производной от полной фазы сигнала на выходе управляемого генератора будет равна
Сигнал x (t) на выходе перемножителя фазового детектора, равный произведению сигналов входного сигнала и сигнала ГУН, определится выражением

Слагаемое суммарной частоты ослабляется совместным действием фильтра и управляемого генератора, так что его можно отбросить.
После прохождения сигналом фазового детектора линейного инвариантного во времени фильтра сигнал е (t) на выходе равен

Причем предполагается, что входной сигнал включен в момент t = 0. Слагаемое e0 ( t) представляет сигнал на выходе, зависящий только от начальных условий в схеме фильтра в момент t = 0. В случае, когда начальные условия можно выбирать произвольно, e0 (t) º0 при любых значениях t.
Функция h (t) называется импульсной переходной функцией фильтра и представляет обратное преобразование Лапласа от его передаточной функции F (р). В большинстве случаев линейный фильтр представляет электрическую схему, состоящую из линейных элементов с сосредоточенными постоянными (сопротивления, конденсаторы и индуктивности) и, возможно, из линейных усилителей. Соотношение между сигналами на входе и на выходе в такой системе описывается дифференциальным уравнением

где т £ п. Отношение двух многочленов

называется передаточной функцией схемы, описываемой приведенным выше дифференциальным уравнением.
С учетом сделанных обозначений частота сигнала ГУН определится выражением

Определяя фазовую ошибку в виде  а коэффициент усиления петли регулирования ФАП как
а коэффициент усиления петли регулирования ФАП как  получим интегро-дифференциальное уравнение, описывающее работу кольца фазовой автоподстройки при известной фазе входного сигнала q ( t):
получим интегро-дифференциальное уравнение, описывающее работу кольца фазовой автоподстройки при известной фазе входного сигнала q ( t):

Принимая во внимание, что


уравнение представляется в виде

которому соответствует модель, изображенная на рис.П.2.2.

Рис. П.2.2 Блок-схема системы фазовой автоподстройки частот
В схеме, полученной на основе математической модели, по отношению к схеме на основе физической модели, перемножитель заменяется вычитающим устройством и синусоидальной нелинейностью, а управляемый генератор - интегратором. Последняя из упомянутых замен означает, что фаза выходного сигнала управляемого генератора пропорциональна интегралу управляющего сигнала. Следует заметить также, что усиление петли регулирования возрастает при возрастании амплитуды принятого сигнала. Если фаза принятого сигнала q ( t) известна, то фазовую ошибку j (t) можно найти, решив нелинейное интегро-дифференциальное уравнение.
Дата добавления: 2019-07-15; просмотров: 258; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!