Разработка технологических и защитных блокировок
Разрешается работа привода поворота барабана закалочной машины только в том случае, если:
1. Выталкиватель находится в исходном положении (включено реле 25РВИ);
2. Доталкивателъ находится в исходном положении (включено реле 22РДИ);
3. Направляющие устройства в исходном положении (включены реле 24-1 РНИ и 24-2 РНИ);
4. Не осуществляется задача и выдача рельсов (включено реле 5ФРР и отключено реле 4ФРР);
5. Нет рельса в 11-й каретке барабана (отключено реле НРБ схемы сигнализации).
Если выполняются все эти условия, то собран узел «А», который дает разрешение на поворот барабана.
Для контроля прохождения рельсом определенных технологических зон использованы фотореле в количестве 14-ти штук и три емкостных датчика.
Защита электрооборудования
Схема предусматривает следующие защиты:
1. Максимально-токовая защита двигателя (реле FA1).
2. Реле контроля возбуждения FA2.
3. Превышение максимальной ЭДС двигателя (реле KV1)
4. Сеточная защита преобразователя по переменному току.
5. Сеточная защита преобразователя по постоянному току.
Уставки защит приведены в таблице 4 и протоколах наладки барабана.
Таблица 4
| Вид защиты | Монтажный символ элемента | Уставка | |
| 1. | Максимальная токовая защита | FA1 | 350А |
| 2. | Контроль тока возбуждения | FA2 | Iвт=4,3А; Iотп=3,2А |
| 3. | Превышение максимальной ЭДС | KV1 | 520 В |
| 4. | Сеточная защита по переменному току | БТЗ (АТР) | 600 В |
| 5. | Сеточная защита по постоянному току | БТЗ (АТР) | 390 В |
|
|
|
Раздел 4. КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ САУ ЭП
Математическая модель САУЭП
Моделирование работы системы произведено на основании структурной схемы с помощью математического пакета Matlab Simulink. Модель изображена на рисунке.
Рисунок 13. Модель системы, построенная с помощью математического пакета Matlab Simulink

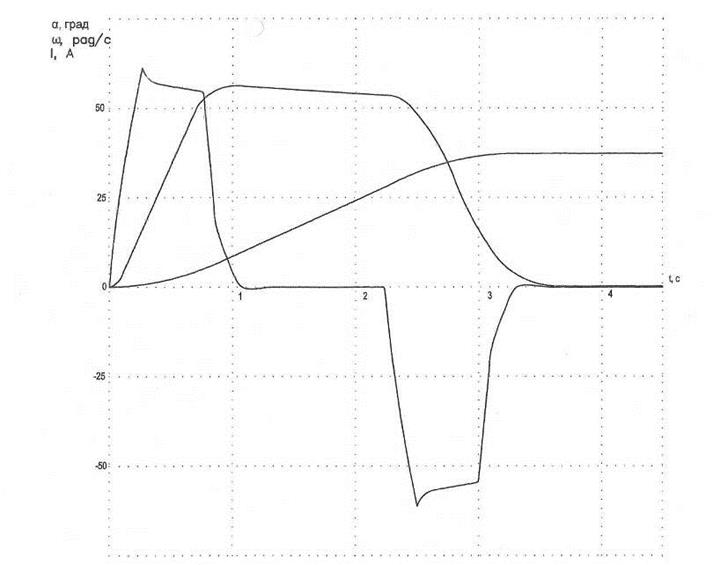
Рисунок 14. Графики переходных процессов скорости, угла поворота барабана и тока
ЗАКЛЮЧЕНИЕ
В настоящее время система автоматизации выполнена на релейно-контакторной базе. Данный вид схем не обеспечивает безаварийной работы, а главное быстрое устранение неполадок в системе, ввиду низкой степени информативности и самодиагностики. В связи с ее громоздкостью и трудностью определения неполадок необходимо осуществить ее перевод на базу программируемого контроллера. Модернизация БЗМ имеет перед собой две основных задачи:
- замена привода вращения БЗМ;
- автоматизация участка ЗМ.
Существует два варианта реализации поставленной задачи. Эти варианты различаются по глубине внедрения в систему.
Первый вариант предусматривает замену только узла автоматики ЗМ и релейной панели управления БЗМ. В этом случае в панели исполнительных механизмов будут выдаваться управляющие сигналы при работе в автоматическом режиме. Ориентировочно для реализации работы системы будет использовано около 130 входных дискретных сигналов и 50 выходных.
|
|
|
Второй вариант предусматривает упрощение релейно-контакторных панелей управления механизмами участка за счет передачи их функций контроллеру. Управление механизмами будет вестись через контроллер как в ручном, так и в автоматическом режимах. Будет обеспечен значительно больший объем информации об оборудовании и лучшее ее представление. Возникает необходимость ввода в контроллер всей информации с органов управления механизмами (ключей, кнопок, командоаппаратов). Ориентировочно для реализации системы по этому принципу потребуется около 300 входных дискретных сигналов и 100 выходных. Число сигналов может уменьшиться за счет ввода части информации через панель оператора.
Дата добавления: 2019-07-15; просмотров: 96; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!