Разработка алгоритма работы управляющей программы
Для обеспечения работы проектируемого устройства с заданными техническими требованиями необходимо запрограммировать наш микроконтроллер на определенную обработку данных и выдачу определенных сигналов. Управляющая программа должна обеспечить работу секундомера. Обеспечив цикл с задержкой в 0.1 с., а затем, подсчитав количество импульсов, пришедших в конце каждого цикла, мы и производим подсчет секунд. Счёт начинается при нажатии кнопки. Для составления программы необходимо сначала составить алгоритм работы устройства, т.е. конечный набор правил для выполнения некоторых процедур.
Схема алгоритма – одна из важнейших частей задачи, она состоит из отдельных операторов. Различают четыре вида операторов, каждый из которых имеет вход и выход рис.4.1 Стрелками обозначаются направление хода вычислений.
 |
(1) (2) (3) (4) (5)
(1) – оператор описание процесса обработки;
(2) – оператор проверки условий;
(3) – оператор начала (конца);
(4) – оператор разрыва схемы;
(5) – оператор ввода/вывода данных.
Рис.4.1 Виды операторов
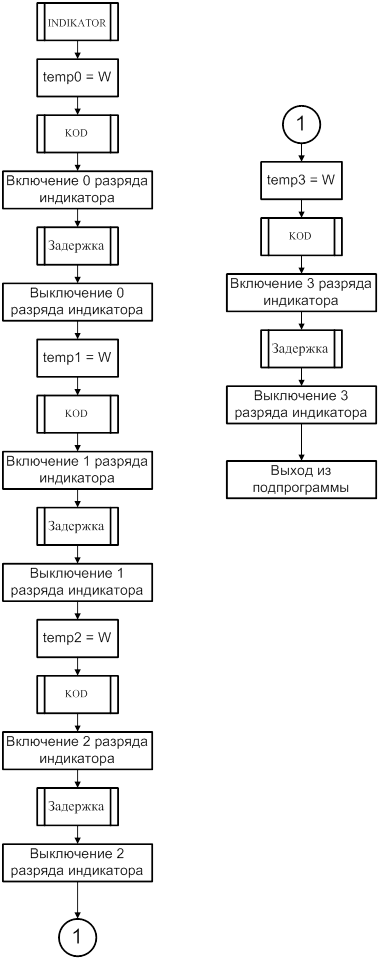
Применим в нашем случае разветвленный алгоритм (см. приложение A).
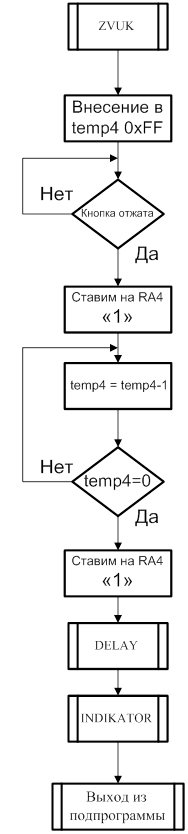
Работа нашей программы начинается с инициализации используемых регистров. Затем производится настройка портов, очистка ячеек памяти, задаются временные циклы, используемые для формирования требуемых величин задержек при работе. Происходит звуковая индикация, время задержки, в течении которой подается сигнал на динамик, равно 829мкс., т.е. с частотой около 1,2кГц, слышимой человеком. Подключаются подпрограммы INDIKATOR и KOD, необходимые для вывода подсчитанных секунд на семисегментные индикаторы.
|
|
|
Разработка управляющей программы
Программа, обеспечивающая работу нашего секундомера, написана на языке Assembler и построена в виде основной программы и подпрограмм.
Основная программа выполняет начальные установки режимов работы и регистров. Порты RA0-RA3 и RB0-RB6 настроены на вывод информации, порты RB0-RB6 отвечают за соответствующие сегменты индикатора. Порт RB7 считывает значение с кнопки. Порт RA4 производит вывод логической единицы, для звуковой индикации, которая осуществляется с помощью подпрограммы ZVUK, по первому нажатию кнопки. Подпрограммы INDIKATOR и KOD, необходимы для выработки сигналов, которые управляют семисегментными индикаторами. Подпрограмма DELAY формирует основную задержку на 0,1 с., задержка формируется одним внутренним и одним внешним циклами. Подпрограмма INCTIM меняем, в соответствии с отображаемыми цифрами, значения регистров temp0- temp3, для индикации.
Работа программы осуществляется по циклу. Вначале производится инициализация портов, очистка рабочих регистров. Запуск программы осуществляется нажатием кнопки “Пуск/Стоп/Сброс”. Внутри цикла осуществляется проверка на переполнение секундомера (если оно произошло, то происходит обнуление всех регистров и программа ожидает нажатия кнопки “Пуск/Стоп/Сброс”). При нажатии кнопки “Пуск/Стоп/Сброс” происходит остановка подсчета секунд, и программа ожидает обнуления. Текст программы приведен ниже.
|
|
|
LIST P=16F628
#include <P16F628.INC>
temp0 EQU H'20'
temp1 EQU H'21'
temp2 EQU H'22'
temp3 EQU H'23'
temp4 EQU H'24'
temp5 EQU H'25'
temp6 EQU H'26'
temp7 EQU H'27'
temp8 EQU H'28'
i EQU H'29'
t EQU H'30'
k EQU H'31'
N0 EQU H'32'
N1 EQU H'33'
org 0
goto Start
Start
clrf PORTA
bsf STATUS,RP0
movlw B'10000000'
movwf TRISB ;Настроить RB7 на ввод, RB0-RB6 на вывод
clrf TRISA
bcf STATUS,RP0
clrf PORTB
k1
clrf temp0
clrf temp1
clrf temp2
clrf temp3
clrf temp4
clrf temp5
clrf temp6
clrf temp7
clrf temp8
clrf i
clrf t
call INDIKATOR
btfss PORTB,7
goto k1
MOVLW 1
|
|
|
MOVWF i
MOVLW 1
MOVWF temp0
call ZVUK
goto c1
k2
call DELAY
c1
call INDIKATOR
btfsc PORTB,7
goto k3
c2
btfss i,0
goto c1
k7
call INCTIM
goto k2
k3
btfsc PORTB,7
goto k3
movf i,0
movwf t
incf i
btfss t,0
goto k1
goto c2
INCTIM
movlw 0xe6 ;230 раз
movwf temp4
k8 decfsz temp4,1
goto k8
;увеличение до 0,9 сек
incf temp0
movf temp0,0 ;инкрементировать на 0,1 сек
sublw 9 ;проверка: если >9, то перейти
btfsc STATUS,0 ;был заем - да, то clrf temp0 и на следующее увеличение
goto I0 ;иначе на IO
clrf temp0 ;очистка значения последнего разряда
;увеличение до 9 сек
incf temp1
movf temp1,0
sublw 9
btfsc STATUS,0
goto I1
clrf temp1
;увеличение до 59 сек
incf temp2
movf temp2,0
sublw 5
|
|
|
btfsc STATUS,0
goto I2
clrf temp2
;увеличение 10 мин
incf temp3
movf temp3,0
sublw 9
btfsc STATUS,0
goto I3
clrf temp3
return
I0
nop
nop
nop
nop
nop
I1
nop
nop
nop
nop
nop
I2 nop
nop
nop
nop
nop
I3 nop
nop
nop
nop
nop
return
INDIKATOR
movf temp0,0
call KOD
movwf PORTB
bsf PORTA,0 ;общий катод
nop
nop
nop
nop
bcf PORTA,0
movf temp1,0
call KOD
movwf PORTB
bsf PORTA,1
nop
nop
nop
nop
bcf PORTA,1
movf temp2,0
call KOD
movwf PORTB
bsf PORTA,2
nop
nop
nop
nop
bcf PORTA,2
movf temp3,0
call KOD
movwf PORTB
bsf PORTA,3
nop
nop
nop
nop
bcf PORTA,3
return
KOD
addwf PCL
retlw B'00111111' ;код 0
retlw B'00000110' ;код 1
retlw B'01011011' ;код 2
retlw B'01001111' ;код 3
retlw B'01100110' ;код 4
retlw B'01101101' ;код 5
retlw B'01111101' ;код 6
retlw B'00000111' ;код 7
retlw B'01111111' ;код 8
retlw B'01101111' ;код 9
ZVUK
movlw 100
movwf temp4
k6
btfsc PORTB,7
goto k6
bsf PORTA,4
k5
decfsz temp4,1
goto k5
bcf PORTA,4
call DELAY
call INDIKATOR
return
DELAY
movlw 0x81 ;128
MOVWF k ;k=ff=255
Cycl_1
movlw 0xff
movwf N0
Cycl_0
decfsz N0,1
goto Cycl_0
decfsz k,1
goto Cycl_1
return
end
Заключение.
Результатом курсового проекта является разработанная принципиальная электрическая схема цифровой секундомер на базе микроконтроллера PIC16F628 в соответствии с техническими требованиями. Разработан алгоритм и написана программа на языке assembler, на основании которой работает микроконтроллер.
Данное устройство очень просто в реализации. Оно содержит минимум элементом, что обеспечивает его дешевизну, и минимизацию затрат на питание. Благодаря простому управлению и индикации пользователь может легко им пользоваться.
В ходе проектирования приобретен опыт работы и умение проектировать цифровые и микропроцессорные устройства.
В ходе проектирования передатчика использовались программы: Microsoft Word, Microsoft Visio, Mplab IDE v7.20.
Список использованной литературы
1.PIC16F62X. Однокристальные 8-разрядные FLASH CMOS с микроконтроллеры компании Microchip technology incorporated: Пер. с англ. –М.: ООО «Микрочип», 2001. – 148 c. www.microchip.ru
2. Бурак А.И., Левкович В.Н. Интегрированная среда MPLab IDE разработки программ для микроконтроллеров PICmicro фирмы Microchip: Метод. пособие к лабораторным работам по курсу «Цифровые и микропроцессорные устройства». – Мн: БГУИР, 2003. – 31 с.
3.Левкович В.Н. Цифровые и микропроцессорные устройства: Лабораторный практикум для студ. спец. I-39 01 02 «Радиоэлектронные системы», I-39 01 03 «Радиоинформатика», I-39 01 04 «Радиоэлектронная защита информации». В 2 ч. Ч. 1. –Мн: БГУИР, 2005. - 38 с.: ил
4.Левкович В.Н., Кащеев А.А. Цифровые и микропроцессорные устройства: Лабораторный практикум для студ. спец. I-39 01 02 «Радиоэлектронные системы», I-39 01 03 «Радиоинформатика», I-39 01 04 «Радиоэлектронная защита информации».
В 2 ч. Ч. 2. –Мн: БГУИР, 2006. - 36 с.: ил.

Дата добавления: 2019-07-15; просмотров: 156; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!