Выбор передаваемых частот и полос пропускания
Передаваемые частоты должны располагаться в полосе частот от 0,4 до 3,2 кГц. Поскольку рекомендуется передавать частоты в полосе шириной 2,2 кГц, то, приняв центральную частоту равной 1,8 кГц, определим границы полосы частот от 0,7 кГц до 2,9 кГц. Поскольку канал связи имеет параболическую характеристику скорости распространения колебаний различных частот, минимум которой находится на центральной частоте 1,8 кГц (рис. 5.7), то крайние подканалы должны иметь большую ширину чем центральные, так как она определяется по формуле:
 , (5.8)
, (5.8)
где
tпос – время посылки;
 - задержка распространения сигнала;
- задержка распространения сигнала;
tнар – время нарастания сигнала.
В свою очередь время нарастания сигнала определяется:
 (5.9)
(5.9)
Соответственно крайние передающие частоты должны располагаться на большем расстоянии друг от друга. Выбранные частоты сведены в таблицу 5.7.
Таблица 5.7
| № подканала | Значение центральной частоты (кГц) | Ширина подканала (Гц) |
| 1 | 0.7 | 230 |
| 2 | 0,9 | 215 |
| 3 | 1,3 | 205 |
| 4 | 1,6 | 200 |
| 5 | 1,8 | 200 |
| 6 | 2,0 | 200 |
| 7 | 2,3 | 205 |
| 8 | 2,7 | 210 |
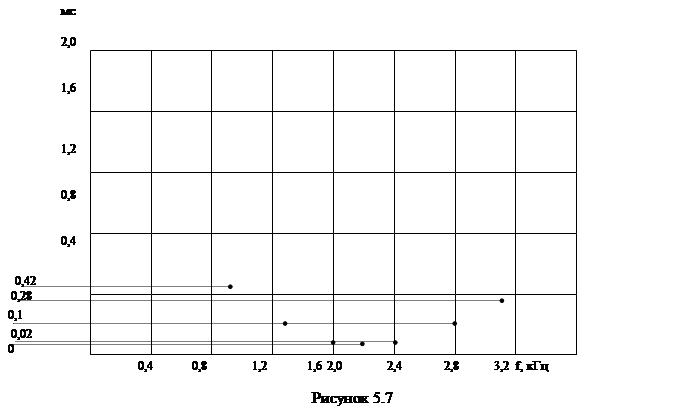 |
По графику (рис. 5.7) определяем значение Dt , и по формулам (5.8) и (5.9) находим ширину каждого подканала. Значения сводим в таблицу 5.4.
Расчёт генераторов гармонических колебаний
Для реализации генераторов возьмём схемы на основе операционных усилителей (ОУ) с мостом Вина. Реализация схем генераторов на основе операционных усилителей является наиболее простой. Схема генератора гармонических колебаний приведена на рис. 5.8.
|
|
|
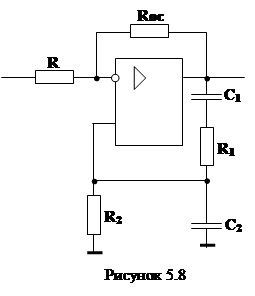 |
Если принять R1 = R2 = R и C1 = C2 = C , то частота колебаний будет определяться формулой:
 . (5.10)
. (5.10)
При этом коэффициент усиления но частоте генерации должен быть не менее 3 и определяется по формуле:
 . (5.11)
. (5.11)
По формулам (5.10) и (5.11) рассчитаем значения сопротивлений резисторов и емкостей конденсаторов для всех генераторов гармонических колебаний, и полученные значения сведём в таблицу 5.8
Значения сопротивлений резисторов R в каждом генераторе примем равным 10 кОм.
Таблица 5.8
| № | Частота колебаний | Значение С | Значение Rос | |||||||||
|
| Рассчитаное | По Е24 | Рассчитаное | По Е24 | ||||||||
| 1 | 0,7 кГц | 24,1 нФ | 24 нФ | 20 кОм | 20 кОм | |||||||
| 2 | 0,9 кГц | 18 нФ | 18 нФ | 20 кОм | 20 кОм | |||||||
| 3 | 1,3 кГц | 12 нФ | 12 нФ | 20 кОм | 20 кОм | |||||||
| 4 | 1,6 кГц | 9,95 нФ | 10 нФ | 20 кОм | 20 кОм | |||||||
| 5 | 1,8 кГц | 8,84 нФ | 9,1 нФ | 20 кОм | 20 кОм | |||||||
| 6 | 2,0 кГц | 7,96 нФ | 8,2 нФ | 20 кОм | 20 кОм | |||||||
| 7 | 2,3 кГц
| 6,92 нФ | 6,8 нФ | 20 кОм | 20 кОм | |||||||
| 8 | 2,7 кГц | 5,89 нФ | 5,6 нФ | 20 кОм | 20 кОм | |||||||
Расчёт полосовых фильтров
В качестве полосовых фильтров возьмём активные фильтры, использующие аппроксимацию Баттарворда как наиболее простые, обеспечивающие стабильные характеристики и часто употребляемые в практике. Для фильтров второго порядка обобщённое выражение для передаточной характеристики выражается формулой:
 , (5.12)
, (5.12)
где
H0 – максимальный коэффициент передачи в рабочей полосе частот;
wп – собственная частота (частота, на которой располагается пик АЧХ );
Q – добротность wп/wr (wr – ширина полосы, определённая как разность между частотами, на которых коэффициент передачи уменьшается на 3 дБ)
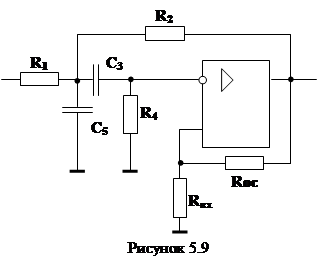 |
Схема полосового фильтра Баттерворда приведена на рис. 5.9.
.
Если при расчёте принять R1 = R2 = R4 = R и С3 = С5 = С, тогда формулы для расчета фильтра выглядят следующим образом:
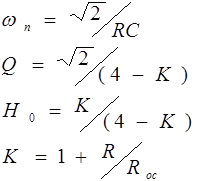 (5.13)
(5.13)
По формулам (5.13) рассчитаем значения элементов фильтров, значения сопротивлений резисторов R и Rвх примем равные 10кОм. Полученные данные сведём в таблицу 5.9.
Таблица 5.9
| № | Частота колебаний
| Полоса пропускания | Значение С | Значение Rос | ||||||||||
|
|
| Рассчитаное | По Е24 | Рассчитаное | По Е24 | |||||||||
| 1 | 0,7 кГц | 235 Гц | 28,0 нФ | 22 нФ | 20 кОм | 20 кОм | ||||||||
| 2 | 0,9 кГц | 215 Гц | 25,0 нФ | 18 нФ | 20 кОм | 20 кОм | ||||||||
| 3 | 1,3 кГц | 205 Гц | 17,3 нФ | 12 нФ | 20 кОм | 20 кОм | ||||||||
| 4 | 1,6 кГц | 200 Гц | 14,0 нФ | 10 нФ | 20 кОм | 20 кОм | ||||||||
| 5 | 1,8 кГц | 200 Гц | 12,5 нФ | 9,1 нФ | 20 кОм | 20 кОм | ||||||||
| 6 | 2,0 кГц | 200 Гц | 11,3 нФ | 8,2 нФ | 20 кОм | 20 кОм | ||||||||
| 7 | 2,3 кГц | 205 Гц | 9,79 нФ | 6,8 нФ | 20 кОм | 20 кОм | ||||||||
| 8 | 2,7 кГц | 210 Гц | 8,34 нФ | 5,6 нФ | 20 кОм | 20 кОм | ||||||||
Разработка блока управления
Схема блока управления представленная на чертеже управляет работой АЦП и переключением посылок. Счётчик, работающий от генератора тактовых импульсов, выдаёт комбинации на логический узел, посредством которого определяется момент времени поступления необходимой комбинации. Комбинации, используемые в работе блока управления и их назначение, приведены в таблице 5.10.
Время перехода от одной комбинации до другой, определяемое частотой генератора тактовых импульсов, равно 0.43 мс.
Регистр в блоке управления, аналогичны регистру в логическом блоке, предназначен для поддержания постоянного сигнала до поступления новой команды.
|
|
|
Таблица 5.10
| 0000 | |
| 0001 | Сброс АЦП и начало преобразования |
| 0010 | Конец преобразований, считывание информации, запись её в регистр и обработка 1-ой посылки |
| 0011 | |
| 0100 | |
| 0101 | |
| 0110 | |
| 0111 | |
| 1000 | |
| 1001 | Конец обработки 1-ой посылки, считывание информации с регистра и обработка 2-ой посылки |
| 1010 | |
| 1011 | |
| 1100 | |
| 1101 | |
| 1110 | |
| 1111 |
Дата добавления: 2019-07-15; просмотров: 245; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!