Алгоритм метода Зойтендейка (случай нелинейных ограничений-неравенств)
Начальный этап. Выбрать начальную точку х1, для которой gi(xi)£0 при i= 1, ..., m. Положить k= 1 и перейти к основному этапу.
Основной этап. Шаг 1. Положить и решить следующую задачу:
 |
Пусть (zk, dk) — оптимальное решение. Если zk=0, то остановиться; xk является точкой Ф. Джона. Если zk < 0, то перейти к шагу 2.
 |
Шаг 2. Взять в качестве ^ оптимальное решение следующей задачи одномерной минимизации:
где. Положить . заменить k на k+1 и перейти к шагу 1.
 |
ПРИМЕР. Рассмотрим задачу
Решим эту задачу методом Зойтендейка. Начнем процесс из точки .Отметим, что
Итерация 1
 |
Поиск направления. В точке х1 = (0.00, 0.75)T имеем а множество индексов активных ограничений есть I= {3}. При этом Задача нахождения направления имеет вид
Можно легко проверить, используя симплекс-метод, что оптимальным решением этой задачи является вектор
Линейный поиск. Любая точка по направлению d1== (1.00, —1.00)T из точки xi = (0.00, 0.75)T может быть представлена в виде ,а соответствующее ей значение целевой функции равно . Максимальное значение , для которого остается допустимой точкой, равно == 0.414. При этом значении l активным становится ограничение . Значение l получается из решения следующей задачи одномерной минимизации:
|
|
|
минимизировать 6l2—2.5l—3.375
при условии 0£l£0.414
Оптимальное значение равно l1= 0.2083. Следовательно, х2 = (x1 +l1d1) -(0.2083,0.5417)T.
Итерация 2
Поиск направления. В точке x2= (0.2083, 0.5417)T имеем (х2)=(—4,2500, —4.2500)T Активных ограничений в этой точке нет, и поэтому задача определения направления имеет вид
минимизировать z
при условиях —4.25d1—4.25d2—z£0,
-1<d1<1, j=1,2.
Оптимальным решением является вектор d2=(1, 1)T, а z2 = -8.50.
Линейный поиск. Можно легко проверить, что максимальное l, при котором точка x2+ld2 допустима, равно lmax == 0.3472. При этом активным становится ограничение . Значение l2 получается минимизацией при условии и, очевидно, равно l2 = 0.3472, так что хз = х2 +l2d2 = (0.5555, 0.8889)T.
Итерация 3
 |
Поиск направления. В точке xз= (0,5555, 0.8889)T имеем (хз)=(—3.5558, —3.5554)", а множество индексов активных ограничений есть I ={1}. Задача определения направления имеет вид
Оптимальным решением является вектор .
Линейный поиск. Максимальное значение l при котором точка xз + ldз допустима, равно lmax = 0,09245. При этом l активным становится ограничение . Значение l3 получается минимизацией при условии 0,09245. Оптимальным решением этой задачи является l3 = 0.09245, так что = (0.6479, 0.8397)T.
|
|
|
Итерация 4
Поиск, направления. Для точки х4= (0.6479, 0.8397)T имеем =(— 3.0878, —3.9370)^ а I={2}. Задача определения направления имеет вид
 |
Оптимальным решением этой задачи является вектор d4 = (-0.5171, 1.0000)T и z4=— 2.340.
Линейный поиск. Максимальное значение К, для которого точка х4 +ld4 допустима, равно lmах= 0.0343. При этом ограничение становится активным. Значение l4 получается минимизацией f(x4+ ld4) == 3,569l2— 2.340l —6.4681 при условии и равно l4= 0.0343. Следовательно, новой точкой является x5==x4 + l4d4 = (0.6302, 0.8740)T. Значение целевой функции в этой точке равно -6.5443, т. е. сравняю со значением —6.5590 в оптимальной точке (0.658872, 0.808226)T .
В табл. 2 приведены результаты вычислений на первых четырех итерациях метода. На рис. 7 показан процесс поиска оптимума.
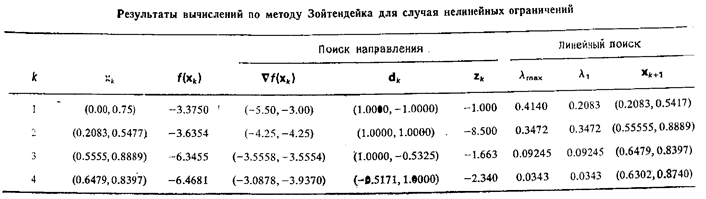
Таблица 2
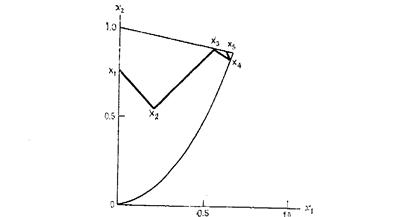 |
Рис 7
Дата добавления: 2019-07-15; просмотров: 345; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!