Навигационная аппаратура потребителей СРНС
Приемоиндикаторы СРНС, состоящие из радиоприемника и вычислителя, предназначены для приема и обработки навигационных сигналов спутников с целью определения необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т. п.).
Пространственное положение потребителя обычно определяется в приемоиндикаторе в два этапа: сначала определяются текущие координаты спутников и первичные навигационные параметры (дальность, ее производные и др.) относительно соответствующих НС, а затем рассчитываются вторичные — географическая широта, долгота, высота потребителя и т. д.
Сравнение текущих координат потребителей с координатами выбранных навигационных точек (точек маршрута, реперов и т. п.) позволяет сформировать в ПИ сигналы для управления различными транспортными средствами. Вектор скорости потребителя вычисляют путем обработки результатов измерений доплеровских сдвигов частоты сигналов НС с учетом известного вектора скорости спутника. Для нахождения пространственной ориентации потребителя в приемоиндикаторе СРНС осуществляются разностные измерения с использованием специальных антенных решеток.
Взаимодействие подсистем СРНС в процессе определения текущих координат спутников
Способ функционирования современных СРНС позволяет отнести их к радиомаячным навигационным средствам. Однако необходимость постоянного определения текущих координат НС и выбора из них видимых потребителю НС и рабочего созвездия исправных НС существенно отличает СРНС от традиционных радиомаячных РНС (РСБН, РСДН), в которых координаты радиомаяков известны и постоянны. Непрерывное нахождение текущих координат НС, движущихся с большими изменяющимися но времени скоростями, представляет собой сложную задачу.
|
|
|
Координаты НС могут быть определены в общем случае на КИК или непосредственно на спутнике (самоопределяющиеся НС). В настоящее время отдается предпочтение первому подходу. Это связано с тем, что существуют хорошо апробированные на практике методы и средства решения этой проблемы в наземных условиях. В современных СРНС управление НС осуществляется с ограниченных территорий и, следовательно, не обеспечивается постоянное взаимодействие КИК и сети НС. В связи с этим выделяют два этапа решения этой задачи. На первом этапе в аппаратуре КИК измеряют координаты спутников в процессе их пролета в зоне видимости и вычисляют параметры их орбит. Эти данные прогнозируются на фиксированные (опорные) моменты времени, например на середину каждого получасового интервала предстоящих суток, до выработки следующего прогноза. Спрогнозированные координаты НС и их производные (эфемериды) передаются на НС, а затем в виде навигационного (служебного) сообщения, соответствующего указанным моментам времени, потребителям. На втором этапе в аппаратуре потребителя по этим данным осуществляется последующее прогнозирование координат НС, т. е., вычисляются текущие координаты НС в интервалах между опорными точками траектории. Процедуры первичного и вторичного прогнозирования координат проводят при известных закономерностях движения НС.
|
|
|
В отличие от самоопределяющихся НС, рассмотренный вариант функционирования СРНС обеспечивает упрощение аппаратуры спутников за счет усложнения структуры КИК с целью достижения заданной надежности.
Заметим, что в навигационное сообщение НС КИК, кроме того, закладывает альманах — набор справочных сведений о всей сети НС, в том числе загрубленные эфемериды НС, которые обычно используются для определения видимых потребителю НС и выбора рабочего созвездия, обеспечивающего высокое качество НВО. Темп обновления точной эфемеридной информации (ЭИ) значительно выше, поэтому ее часто называют оперативной ЭИ в отличие от долговременной ЭИ в альманахе.
|
|
|
Основные навигационные характеристики НС
К основным навигационным характеристикам НС относят зону обзора, зону видимости, продолжительность наблюдения, орбитальную конфигурацию сети НС и др. На чертеже (рис. 2) поясняются основные определения.
Зона обзора НС представляет собой участок земной поверхности, на котором можно осуществлять наблюдение за НС, прием его сигналов. Центром зоны обзора является подспутниковая точка О3, называемая географическим местом спутника (ГМС).
Координаты ГМС (географические широта и долгота) могут быть рассчитаны по формулам:

где  — орбитальные элементы НС;
— орбитальные элементы НС;  — гринвичское звездное время;
— гринвичское звездное время;
 — угловая скорость прецессии узла орбиты. Зона обзора ограничена линией истинного горизонта в точке НС, поэтому ее размер зависит от высоты НС (
— угловая скорость прецессии узла орбиты. Зона обзора ограничена линией истинного горизонта в точке НС, поэтому ее размер зависит от высоты НС (  ). Размер зоны обзора характеризуется углом
). Размер зоны обзора характеризуется углом  или соответствующей ему дугой АО3, которая называется радиусом зоны обзора
или соответствующей ему дугой АО3, которая называется радиусом зоны обзора  [км]. Из рис. 2 видно, что
[км]. Из рис. 2 видно, что
|
|
 (1)
(1)
Бортовые приемоиндикаторы СРНС обеспечивают заданную точность измерений в зоне обзора, ограниченной радиогоризонтом, который поднят для пользователя на угол 5 ... 10° (угол маски). В этом случае зона обзора определяется углом  , где
, где
|
|
|
 (2)
(2)
Площадь зоны обзора  . Тогда относительная площадь обзора
. Тогда относительная площадь обзора  , где
, где  - площадь земного шара.
- площадь земного шара.
При увеличении высоты НС до  40 000км радиус зоны обзора изменяется незначительно (
40 000км радиус зоны обзора изменяется незначительно (  9 400 км), а затраты на формирование такой орбиты возрастают существенно.
9 400 км), а затраты на формирование такой орбиты возрастают существенно.
Рассмотренная выше зона обзора соответствует фиксированному моменту времени (мгновенная зона обзора).
У нестационарных НС мгновенная зона обзора, перемещаясь по поверхности Земли, образует зону обзора в виде полосы шириной  . Ее осью является совокупность ГМС - трасса НС.
. Ее осью является совокупность ГМС - трасса НС.
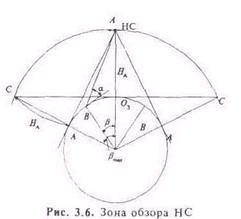
Установим условия видимости НС для наблюдателя, расположенного в точке  , лежащей на трассе НС (рис. 3). Область небосвода СС’, в которой
, лежащей на трассе НС (рис. 3). Область небосвода СС’, в которой
|
|

НС наблюдается из точки  ; от момента восхода
; от момента восхода  над горизонтом до момента захода
над горизонтом до момента захода  называют зоной видимости (геометрической зоной видимости), для которой справедливы соотношения (1), (2). Из рис. 3 видно, что максимальный угловой радиус зоны видимости (дуга А'С')
называют зоной видимости (геометрической зоной видимости), для которой справедливы соотношения (1), (2). Из рис. 3 видно, что максимальный угловой радиус зоны видимости (дуга А'С')

С учетом радиогоризонта угловой радиус зоны обзора уменьшается  . Здесь угол a называют минимально допустимой высотой.
. Здесь угол a называют минимально допустимой высотой.
Продолжительность сеанса связи с НС  (в пределах видимости НС) определяется разностью (
(в пределах видимости НС) определяется разностью (  ) и зависит от угла b (т. е. от высоты полета НС или периода его обращения Т).
) и зависит от угла b (т. е. от высоты полета НС или периода его обращения Т).
Для круговой орбиты  , где
, где  — угловая скорость обращения спутника.
— угловая скорость обращения спутника.
Для СРНС ГЛОНАСС  км,
км,  % при
% при  км,
км,  ;
;  » 300 мин.
» 300 мин.
Очевидно, что если потребитель находится в стороне от трассы НС, то продолжительность наблюдения спутника уменьшается.
Навигационные алгоритмы, реализованные в бортовых приемоиндикаторах современных СРНС, обычно ориентированы на прием сигналов от нескольких НС одновременно. Наблюдение в любой точке рабочей зоны СРНС одновременно нескольких НС обеспечивается путем оптимального выбора стабильной пространственно-временной структуры (конфигурации) сети НС — числа, ориентации и формы орбит; числа НС на каждой из них; взаимного расположения орбит и спутников на них. Обычно число НС в сети превышает минимально необходимое за счет резервных НС.
Решение навигационной задачи
Основным содержанием навигационной задачи (НЗ) в СРНС является определение пространственно-временных координат потребителя, а также составляющих его скорости, поэтому в результате решения навигационной задачи должен быть определен расширенный вектор состояния потребителя П, который в инерциальной системе координат можно представить в виде  . Элементами данного вектора служат пространственные координаты (х, у, z) потребителя, временная поправка t ' шкалы времени потребителя относительно системной ШВ, а также составляющие вектора скорости
. Элементами данного вектора служат пространственные координаты (х, у, z) потребителя, временная поправка t ' шкалы времени потребителя относительно системной ШВ, а также составляющие вектора скорости  .
.
Элементы вектора потребителя недоступны непосредственному измерению с помощью радиосредств. У принятого радиосигнала могут измеряться те или другие его параметры, например задержка или доплеровское смещение частоты. Измеряемый в интересах навигации параметр радиосигнала называют радионавигационным (РНП), а соответствующий ему геометрический параметр — навигационным (НП), поэтому задержка сигнала t и его доплеровское смещение частоты  являются радионавигационными параметрами, а соответствующие им дальность до объекта Д и радиальная скорость сближения объектов
являются радионавигационными параметрами, а соответствующие им дальность до объекта Д и радиальная скорость сближения объектов  служат навигационными параметрами. Связь между этими параметрами дается соотношениями:
служат навигационными параметрами. Связь между этими параметрами дается соотношениями:

де с — скорость света; l — длина волны излучаемого НС сигнала.
Геометрическое место точек пространства с одинаковым значением навигационного параметра называют поверхностью положения. Пересечение двух поверхностей положения определяет линию положения — геометрическое место точек пространства, имеющих два определенных значения двух навигационных параметров. Местоположение определяется координатами точки пересечения трех поверхностей положения или двух линий положения. В ряде случаев (из-за нелинейности) две линии положения могут пересекаться в двух точках. При этом однозначно найти местоположение можно, только используя дополнительную поверхность положения или иную информацию о местоположении объекта.
Для решения навигационной задачи, т. с. для нахождения вектора потребителя П, используют функциональную связь между навигационными параметрами и компонентами вектора потребителя. Соответствующие функциональные зависимости принято называть навигационными функциями. Конкретный вид навигационных функций обусловлен многими факторами: видом НП, характером движения НС и потребителя, выбранной системой координат и т.д.
Навигационные функции для пространственных координат потребителя можно определить с помощью различных разновидностей дальномерных, разностно-дальномерных, угломерных методов и их комбинаций. Для получения навигационных функций, включающих составляющие вектора скорости потребителя, используют радиально-скоростные методы.
СРНС ГЛОНАСС
Дата добавления: 2019-07-15; просмотров: 382; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!