ОПИСАНИЕ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ.
Самарский государственный аэрокосмический университет имени академика С.П. Королева
“ИССЛЕДОВАНИЕ АЛГОРИТМОВ ОБНАРУЖЕНИЯ БИОЛОГИЧЕСКИХ СИГНАЛОВ”
Методические указания к лабораторной работе
Самара 1999
Составитель В.Н. Конюхов
В методических указаниях изложены основные теоретические сведения об оптимальных методах обнаружения сигнала на фоне белого гауссовского шума, рассмотрены наиболее часто используемые критерии оптимальности и структурные схемы оптимальных обнаружителей. Приведено описание программного обеспечения для реализации обнаружителей R-зубца электрокардиосигнала и порядок выполнения работы. Рекомендуется студентам специальности 19.05. Подготовлены на кафедре радиотехники.
Цель работы: изучение принципов построения оптимальных обнаружителей, алгоритмов их реализации, сравнительных характеристик оптимальных и квазиоптимальных обнаружителей сигналов для различных аддитивных смесей полезного сигнала и помех, а также параметров обнаружителей.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
1.1. Общие положения.
Обнаружения биологических сигналов на фоне различных помех физической и физиологической природы является одной из наиболее распространенных задач, решаемых в автоматизированных приборах и системах медико-биологического назначения. От качества обнаружения зависит достоверность и точность получаемых диагностических заключений, потребительские качества и сама возможность работы системы. Например, пропущенные R-зубцы электрокардиосигнала (ЭКС) при мониторинге у больного с экстрасистолией могут не позволить врачу обнаружить угрожающие жизни больного нарушения. С другой стороны, идентифицированные как R-зубцы ЭКС помехи вызывают ложные тревоги, отвлекают врача, искажают результаты диагностики.
Помимо методов, использующих для диагностики информацию об отсутствии или наличии неких событий (отсутствие или наличие R-зубца ЭКС и т.п.) в которых алгоритмы обнаружения биологических сигналов играют основополагающую роль, задача обнаружения часто предшествует задаче оценки параметров сигналов. Например, часто необходимо оценить максимальное значение некоторого характерного сигнала. Так в методе пульсовой оксиметрии измерение степени насыщения гемоглобина артериальной крови производится путем вычисления отношения нормированных амплитуд поглощения света на двух длинах волн во время систолы. В связи с этим необходимы надежные алгоритмы обнаружения систолы на фоне помех возникающих, например, при движении пациента.
Алгоритм обнаружения это по сути алгоритм принятия решения о наступлении определенного события на основании априорной информации, принимаемой информации (наблюдении) об этом событии (сигнале) и различных мешающих факторах (помехах). Решение об отсутствии или наличии сигнала в имеющейся смеси теоретически не может быть неошибочным по причине случайного характера сигнала и помехи, и, как и всякое другое решение, имеет свою цену в зависимости от последствий. Таким образом, необходим критерий, по которому принимается решение, который, в свою очередь, определяется целью принятия решения.
Другим фактором при принятии решения является время. Очевидно, что чем дольше наблюдать событие, тем более достоверно можно принять решение о его наступлении. С этой точки зрения алгоритмы обнаружения можно разделить на две группы: алгоритмы обнаружения, работающие на фиксированном интервале времени и последовательные алгоритмы. В последовательных алгоритмах заранее не фиксируется интервал наблюдения, а определяется самим ходом наблюдения. При благоприятных условиях наблюдения (например низкий уровень помех) последовательные алгоритмы позволяют получить выигрыш во времени. Далее будем рассматривать только алгоритмы обнаружения работающие на фиксированном интервале времени.
В общем виде задача обнаружения ставится обычно следующим образом. Заданы статистические характеристики сигналов и помех и характеристики их взаимодействия. Необходимо определить структуру устройства (алгоритма), осуществляющую по выбранному критерию оптимальную обработку смеси сигнала и помехи, а также вычислить их количественные характеристики обнаружения.
1.2. Критерии принятия решения.
Обнаружение сигнала представляет собой проверку двух гипотез: сигнал присутствует (гипотеза  ) и сигнал отсутствует (гипотеза
) и сигнал отсутствует (гипотеза  ). При этом возможны следующие четыре исхода:
). При этом возможны следующие четыре исхода:
n верна гипотеза выбираем ;
n верна гипотеза выбираем ;
n верна гипотеза выбираем ;
n верна гипотеза выбираем .
Первый и третий случай соответствуют правильному выбору, а второй и четвертый- ошибочному. Смысл критерия заключается в том, что каждому возможному исходу придается некоторое относительное значение в зависимости от возможных последствий. Очевидно, что алгоритм обработки принимаемой информации будет зависеть от выбранного критерия решения. Однако для наиболее часто применяемых на практике, критерия Байеса и критерия Неймана-Пирсона, алгоритмы обработки являются подобными.
1.2.1. Критерий Байеса.
При использовании критерия Байеса делаются следующие допущения:
n известны априорные вероятности гипотез и -  и
и  ;
;
n каждому возможному исходу приписывается свой вес-  ,
,  ,
,  ,
,  .
.
Здесь первая цифра подстрочного индекса у весовых коэффициентов означает выбранную гипотезу, а вторая- гипотезу которая была правильной.
Каждое решение будет сопровождаться определенными потерями. Желательно, чтобы эти потери в среднем были как можно меньше. Потери в данном случае можно описать средним или байесовским риском:
 (1).
(1).
Принятие решения представляет собой фактически правило разбиения пространства наблюдений на две области:  и
и  (рис.1). Здесь источник сообщений формирует сообщения имеющие плотность вероятности
(рис.1). Здесь источник сообщений формирует сообщения имеющие плотность вероятности  если верна гипотеза и
если верна гипотеза и  если верна гипотеза .
если верна гипотеза .

Рисунок 1.
Если результат наблюдения оказывается в области , то принимается гипотеза и наоборот. Тогда выражение (1) можно записать следующим образом:
 (2).
(2).
В выражении (2) первое и третье слагаемое соответствует правильному решению, а второе и четвертое- ошибочному. Логично предположить, что стоимость ошибочного решения должна быть выше, чем стоимость правильного:
 ,
,  (3).
(3).
В соответствии с критерием Байеса необходимо таким образом разбить пространство наблюдений, чтобы средний риск  (2) был минимальным. Например, уменьшая область
(2) был минимальным. Например, уменьшая область  мы будем уменьшать составляющую риска связанную с четвертым слагаемым. Однако, так как любое наблюдение
мы будем уменьшать составляющую риска связанную с четвертым слагаемым. Однако, так как любое наблюдение  должно попасть либо в область
должно попасть либо в область  либо в область , будет увеличиваться составляющая риска связанная со вторым слагаемым.
либо в область , будет увеличиваться составляющая риска связанная со вторым слагаемым.
В теории показано, что байесовский риск минимален,  когда решение принимается в соответствии с алгоритмом:
когда решение принимается в соответствии с алгоритмом:
если  , то
, то  ;
;
(4),
если  , то
, то  ;
;
где  , называемое отношением правдоподобия, определяется как:
, называемое отношением правдоподобия, определяется как:
 (5).
(5).
Таким образом, если отношение правдоподобия (5) больше некоторого порога, определяемого априорными вероятностями гипотез и стоимостью потерь, то принимается гипотеза и наоборот.
На практике часто неизвестны априорные вероятности , , а также стоимости решений  ,
,  ,
,  ,
,  . В этих случаях используют другие критерии оптимальности обнаружения.
. В этих случаях используют другие критерии оптимальности обнаружения.
Так, если неизвестны априорные вероятности и , то можно воспользоваться минимаксным правилом выбора решений. Минимаксное правило выбора представляет собой частный случай байесовского правила для наименее благоприятного априорного распределения гипотез и рассчитано на минимизацию максимально возможного риска. Отличие минимаксного алгоритма от байесовского заключается в выборе порога сравнения отношения правдоподобия  .
.
В случае если неизвестны стоимости решений можно воспользоваться правилом выбора по максимальной апостериорной вероятности. Алгоритм в этом случае будет следующий:
если  , то ;
, то ;
(6)
если  , то
, то  .
.
Наконец, если неизвестны и априорные вероятности и стоимости потерь, то можно использовать алгоритм максимального правдоподобия:
если  , то ;
, то ;
(7)
если , то .
Другой подход при отсутствии априорной информации о потерях и вероятности гипотез основан на критерии Неймана-Пирсона.
1.2.2. Критерий Неймана-Пирсона.
Критерий Неймана-Пирсона применяют при проверке гипотезы против альтернативы . В этом случае возможны два правильных решения и два ошибочных. Условные вероятности
(8)

называют соответственно ошибками первого и второго рода. Тогда вероятности правильных решений определятся как:

(9).

Согласно критерию Неймана-Пирсона оптимальный алгоритм должен обеспечивать минимально возможную вероятность ошибок второго рода  при условии, что вероятность ошибок первого рода не больше заданного значения
при условии, что вероятность ошибок первого рода не больше заданного значения  , т.е.
, т.е.  .
.
Показано, что это условие выполняется, если решение принимается в соответствии со следующим алгоритмом:
если  , то ;
, то ;
(10)
если , то .
Порог  выбирается из заданного значения вероятности ошибки первого рода:
выбирается из заданного значения вероятности ошибки первого рода:
 (11).
(11).
Все рассмотренные выше алгоритмы состоят из двух процедур: формирования отношения правдоподобия и сравнения этого отношения с фиксированным порогом. Часто вместо отношения правдоподобия используют его натуральный логарифм, что позволяет во многих практических случаях упростить реализацию алгоритма. Тогда обобщенные структурные схемы оптимальных обнаружителей можно представить следующим образом (рис.2).

Рисунок 2.
1.3. Обнаружение сигнала на фоне белого гауссовского шума по критерию Неймана-Пирсона.
Предположим что имеется аддитивная смесь белого гауссовского шума (БГШ)  с нулевым математическим ожиданием
с нулевым математическим ожиданием  , спектральной плотностью
, спектральной плотностью  и детерминированного сигнала
и детерминированного сигнала  :
:
 (12).
(12).
При этом предполагаем, что полезный сигнал полностью расположен на интервале наблюдения  . Гипотезе соответствует присутствие в смеси сигнала, а гипотезе - отсутствие. Тогда отношение правдоподобия (5) примет вид:
. Гипотезе соответствует присутствие в смеси сигнала, а гипотезе - отсутствие. Тогда отношение правдоподобия (5) примет вид:
 (13).
(13).
Решение о наличии или отсутствии сигнала в данном случае принимается на основании сравнения отношения правдоподобия (13) с некоторым порогом  , который определяется выбранным критерием. Логарифмируя (13) после несложных преобразований получим, что это эквивалентно сравнению величины
, который определяется выбранным критерием. Логарифмируя (13) после несложных преобразований получим, что это эквивалентно сравнению величины
 (14)
(14)
с порогом  , где
, где  - энергия сигнала.
- энергия сигнала.
Сформировать величину (14) можно с помощью корреляционного приемника или согласованного фильтра. Тогда структурные схемы оптимальных обнаружителей детерминированного сигнала на фоне БГШ можно представить следующим образом (рис.3).
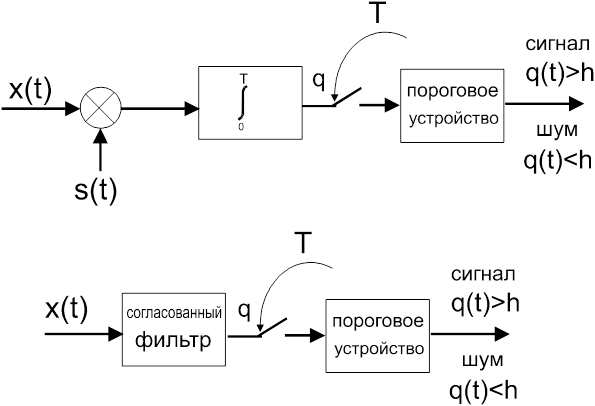
Рисунок 3.
Данные структурные схемы реализуют оптимальные алгоритмы обнаружения детерминированного сигнала на фоне БГШ для всех приведенных выше критериев. Будет ли обнаружение оптимальным по тому или иному критерию определяется порогом сравнения .
Рассмотрим выбор порога при обнаружении по критерию Неймана-Пирсона и определим характеристики полученного обнаружителя.
Пусть сигнал в смеси присутствует, т.е.  . Тогда случайная величина, получаемая в результате линейного преобразования сигнала и БГШ,
. Тогда случайная величина, получаемая в результате линейного преобразования сигнала и БГШ,
 (15)
(15)
будет иметь нормальную плотность распределения вероятности  с математическим ожиданием
с математическим ожиданием  и дисперсией
и дисперсией  .
.
В отсутствии сигнала случайная величина
 (16)
(16)
также имеет нормальную плотность вероятности с математическим ожиданием  и дисперсией
и дисперсией  (рис.4).
(рис.4).
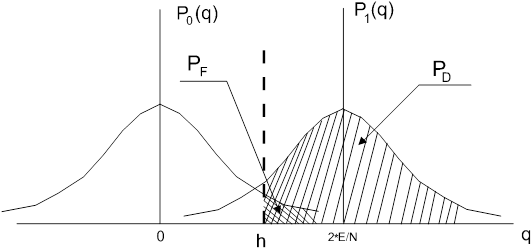
Рисунок 4.
Согласно критерию Неймана-Пирсона должна задаваться вероятность ложной тревоги :
 (17),
(17),
где  - интеграл вероятности. Тогда вероятность правильного обнаружения будет определяться как:
- интеграл вероятности. Тогда вероятность правильного обнаружения будет определяться как:
 (18).
(18).
Из выражений (17) и (18) следует, что как вероятность ложной тревоги, так и вероятность правильного обнаружения однозначно определяются отношением порога  к пиковой мощности
к пиковой мощности  .
.
По формулам (17) и (18) можно построить кривые обнаружения сигнала, которые представляют собой зависимость вероятности правильного обнаружения  от отношения сигнал шум при фиксированной вероятности ложной тревоги (рис.5).
от отношения сигнал шум при фиксированной вероятности ложной тревоги (рис.5).

Рисунок 5.
Пользуясь кривыми обнаружения можно определить пороговый сигнал, т.е. такой сигнал, который при заданной вероятности ложной тревоги можно обнаружить с требуемой вероятностью правильного обнаружения.
Из рассмотренного выше следует, что обнаружение детерминированного сигнала при заданных вероятностях  и
и  полностью определяется пиковым отношением сигнал/шум на выходе корреляционного приемника или согласованного фильтра и не зависит от формы сигнала.
полностью определяется пиковым отношением сигнал/шум на выходе корреляционного приемника или согласованного фильтра и не зависит от формы сигнала.
1.4. Особенности обнаружения биологических сигналов.
Рассмотренная в разделе 1.3 модель (12) сигнала и помехи в общем случае редко адекватно описывает реальную ситуацию при обнаружении характерных элементов биологических сигналов. В модели (12) сигнал считался известным, имеющим постоянные параметры. Однако биологические сигналы отличаются большой вариабельностью. На рис. 6 приведены два фрагмента QRS-комплекса зарегистрированные у различных людей.


Рисунок 6.
Для того, чтобы сформировать величину  (14) необходимо знание опорного сигнала
(14) необходимо знание опорного сигнала  . Очевидно, что будет различным для двух случаев приведенных на рис.6. Кроме того, сигнал может изменять свои параметры у одного и того же человека в зависимости от состояния организма, условий регистрации и т.п.
. Очевидно, что будет различным для двух случаев приведенных на рис.6. Кроме того, сигнал может изменять свои параметры у одного и того же человека в зависимости от состояния организма, условий регистрации и т.п.
Помимо отсутствия точной информации о полезном сигнале, помехи при регистрации биологических сигналов, в общем случае, отличаются о БГШ. Например при регистрации электрокардиосигнала (ЭКС) как правило присутствуют помеха вызванная смещением электродов при движении пациента (артефакты движения), помеха обусловленная поляризацией электродов и дыханием обследуемого (рис.7) сетевая помеха частотой 50 Гц (рис.8).

Рисунок 7.

Рисунок 8.
Следовательно при обработке биологических сигналов можно говорить только о квазиоптимальном обнаружении, что связано как с не полностью известными параметрами сигнала, так и с нестационарным характером помехи. В этом случае важен выбор опорного сигнала .
Существует несколько подходов при выборе опорного сигнала  в условиях не полностью известных параметров обнаруживаемого биологического сигнала.
в условиях не полностью известных параметров обнаруживаемого биологического сигнала.
1. Можно реализовать адаптивный алгоритм, при котором на первом этапе происходит обнаружение сигнала с помощью простого эвристического алгоритма, а далее методом накопления формируется опорный сигнал, характерный для данного обследуемого. Такой подход позволяет максимально учесть индивидуальные отклонения параметров обнаруживаемого сигнала и улучшить характеристики обнаружения. Недостатком применения подобного адаптивного алгоритма является его относительная сложность.
2. Можно сформировать усредненный опорный сигнал, используя имеющуюся базу данных биологических сигналов, зарегистрированных у различных людей. В этом случае обнаружение уже не является оптимальным для каждого конкретного пациента, хотя в среднем не сильно от него отличается.
3. Можно использовать в качестве опорного сигнала аппроксимацию реальных элементов биологических сигналов. В этом случае качество обнаружения определяется насколько близка аппроксимирующая функция к реальному сигналу. Например, при обнаружении R-зубца можно использовать в качестве опорного треугольный сигнал в связи с его близостью по форме к реальному R-зубцу.
Часто, при использовании аппроксимирующей функции, жертвуют характеристиками обнаружения в пользу упрощения реализации алгоритма. Так, треугольный сигнал в рассмотренном выше примере может быть представлен ступенчатой функцией уровни которого равны степени двойки. Это позволяет упростить процедуру вычисления корреляционной функции за счет замены операции умножения операцией сдвига (рис. 9).

Рисунок 9.
Другой отличительной чертой при обнаружении биологических сигналов является выбор порога сравнения  и возможность значительного улучшения качества обнаружения за счет учета априорных физиологических сведений о природе сигнала.
и возможность значительного улучшения качества обнаружения за счет учета априорных физиологических сведений о природе сигнала.
Обычно порог сравнения делают адаптивным, изменяющимся в зависимости от амплитуды корреляционной функции или пикового значения сигнала на выходе согласованного фильтра, которые могут значительно варьироваться как от пациента к пациенту, так и у одного и того же пациента при изменении его физиологического состояния, условий регистрации. Например, спазм периферических сосудов руки приведет к уменьшению кровенаполнения и, как следствие, ослаблению амплитуды пульсаций, регистрируемой с помощью оптического датчика, расположенного на пальце. Если порог сравнения фиксировано задан в условиях нормального кровообращения, то в описанной выше ситуации возникнет возможность значительного увеличения ошибок второго рода (пропусков сигнала). Следовательно алгоритм обнаружения должен отслеживать изменение амплитуды сигнала и подстраивать порог обнаружения .
Возможность значительно повысить качество обнаружения за счет учета физиологических сведений можно продемонстрировать на примере обнаружителя R-зубцов ЭКС. Известно, что частота сердечных сокращений у человека не превышает значения 300 ударов в минуту, что соответствует длительности RR-интервала в 200 мс. Это означает, что после появления R-зубца ЭКС в течении 200 мс появление следующего R-зубца невозможно и если смесь сигнала и шума за этот период превышает пороговый уровень, то с вероятностью равной единице можно считать, что это ошибка первого рода.
ОПИСАНИЕ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ.
Программное обеспечение представляет собой набор утилит, объединенных общим интерфейсом пользователя, и позволяет реализовать корреляционный метод обнаружения R-зубца ЭКС. Внешний вид интерфейса приведен на рис. 10.


Рисунок 10.
В меню «Файл» (рис.11) реализованы функции открытия файла данных, выбора опорного сигнала, формирования аддитивной смеси сигнала и помехи.
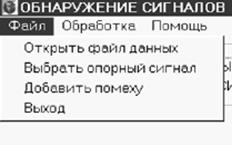
Рисунок 11.
Формирование необходимой аддитивной смеси сигнала и помехи осуществляется путем выбора параметров в секциях «Тип помехи» и «Амплитуда помехи». Амплитуда помехи задается в единицах младшего разряда. Так, если АЦП имеет 8-мь разрядов, то максимальное число соответствующее данной разрядности «255». Следовательно амплитуда помехи «50» соответствует 6-ти разрядам.
В меню «Обработка» (рис.12) реализованы функции отображения ЭКС, отображения сформированной смеси ЭКС и шума, вычисления корреляционной функции, отображения вычисленной корреляционной функции, обнаружения R-зубцов по вычисленной корреляционной функции.

Рисунок 12.
Вычисление корреляционной функции осуществляется на том фрагменте данных, часть которого в данный момент отображается на экране в виде графика. Например, если отображается исходный ЭКС, то корреляционная функция будет вычислена для этого ЭКС и выбранного опорного сигнала. Если отображается смесь ЭКС и шума с выбранными параметрами, то корреляционная функция будет вычислена для данной смеси ЭКС и шума и выбранного опорного сигнала.
Обнаружение R-зубцов ЭКС осуществляется для последней вычисленной корреляционной функции и выбранного порога обнаружения.
Вычисление корреляционной функции осуществляется по формуле
 (19),
(19),
где  - текущий отсчет корреляционной функции,
- текущий отсчет корреляционной функции,  - число отсчетов опорного сигнала,
- число отсчетов опорного сигнала,  - математическое ожидание обрабатываемого сигнала на интервале
- математическое ожидание обрабатываемого сигнала на интервале  ,
,  - математическое ожидание опорного сигнала на интервале ,
- математическое ожидание опорного сигнала на интервале ,  - обрабатываемый сигнал,
- обрабатываемый сигнал,  - опорный сигнал.
- опорный сигнал.
ОПИСАНИЕ ИСХОДНЫХ ДАННЫХ.
Для исследования заданы три фрагмента записи электрокардиосигнала (ЭКС). Разные фрагменты ЭКС зарегистрированы у различных людей. Запись проводилась в специальной экранированной камере посредством прецизионного усилителя и вводилась в ПЭВМ с помощью 8-ми разрядного АЦП с динамическим диапазоном -5 - +5 В. Частота дискретизации для ЭКС составляет 1000 Гц. Имена файлов данных ЭКС-ecg1.dat, ecg2.dat, ecg3.dat.
В качестве опорных выступают два сигнала- pattern1 и pattern2. Опорный сигнал pattern1 представляет собой аппроксимацию R-зубца ЭКС прямоугольным сигналов, а опорный сигнал pattern2 получен посредством усреднения различных R-зубцов зарегистрированных у группы людей. Длительность опорного сигнала составляет 80 мс, что соответствует 80-ти отсчетам при частоте дискретизации 1 кГц.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Просмотреть и зарисовать R-зубцы ЭКС выбранные из трех файлов данных с частотой дискретизации 1 кГц.
2. Получить корреляционные функции для трех файлов ЭКС, используя в качестве опорного сигнала pattern2. Зарисовать их с частотой дискретизации 0.2 кГц.
3. Определить количество R-зубцов в полученных корреляционных функциях при пороге обнаружения 0.65. Для полученных данных считать, что они не содержат ошибок обнаружения.
4. Сформировать данные, содержащие сумму сигнала (для трех файлов ЭКС) и помехи с частотой 50 Гц для четырех значений помехи 10, 20, 40, 50. Зарисовать с частотой дискретизации 0.2 кГц при помехе равной 50 для трех файлов. Для каждого набора данных оцените отношение сигнал/шум при помехе равной 50.
5. Вычислить корреляционные функции для полученных данных, используя в качестве опорного сигнала pattern2. Зарисовать с частотой дискретизации 0.2 кГц при помехе равной 50 для трех файлов. Определите отношение сигнал/шум при помехе равной 50. Во сколько раз увеличилось отношение сигнал/шум по сравнению с исходным сигналом.
6. Определить по полученным корреляционным функциям количество R-зубцов при порогах обнаружения 0.2, 0.5, 0.7, 0.9.
7. Вычислить вероятности ошибок обнаружения для различных соотношений сигнал/шум и порогов обнаружения.
8. Сформировать данные, содержащие сумму сигнала (для трех файлов ЭКС) и нормальной помехи с амплитудами 10, 20, 40, 50. Зарисовать с частотами развертки 0.2 кГц при помехе равной 50 для трех файлов.
9. Повторить пункты 5-7.
10. Повторить пункты 4-9 для опорного сигнала pattern1. Определить насколько уменьшилось отношение сигнал/шум в каждом случае.
СОДЕРЖАНИЕ ОТЧЕТА
Отчет должен содержать:
n наименование и цель работы;
n рисунки полученные в пп. 1, 2, 4, 5, 8;
n значения, полученные в п.6 сведенные в таблицу;
n графики зависимости вероятности ошибок обнаружения от отношения сигнал/шум при различных порогах обнаружения (по результатам п.7);
n Данные об отличии отношения сигнал/шум при использовании двух различных опорных сигналов (п.10) для всех случаев сведенные в таблицу.
Рекомендуется рисунки и графики сгруппировать по признаку принадлежность к конкретному файлу. Все рисунки и графики должны иметь надписи, поясняющие для каких данных и при каких условиях они получены. Например, корреляционная функция опорного сигнала pattern1 и смеси ЭКС из файла ecg1.dat и нормальной помехи амплитудой 50.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что такое последовательные алгоритмы обнаружения? В чем их преимущества над алгоритмами обнаружения, работающими на фиксированном интервале времени?
2. Как в общем виде ставится задача обнаружения?
3. Какие исходы возможны при обнаружении сигнала? В чем смысл критерия обнаружения?
4. Какие допущения делаются при использовании критерия Байеса?
5. Приведите выражение для байесовского риска.
6. Что представляет собой принятие решения с точки зрения разбиения пространства наблюдения? Приведите пример и поясните.
7. В чем заключается критерий Байеса?
8. В каком случае байесовский риск минимален?
9. Приведите обобщенное выражение для отношения правдоподобия.
10. В каких случаях применяется минимаксное правило выбора и в чем его отличие от байесовского?
11. В каких случаях применяется правило выбора по максимальной апостериорной вероятности и каков в этом случае алгоритм принятия решения?
12. В каких случаях применяется алгоритм максимального правдоподобия и в чем он заключается?
13. Приведите выражение для ошибок первого и второго рода и поясните их смысл.
14. В чем заключается критерий Неймана-Пирсона. Приведите алгоритм обнаружения по критерию Неймана-Пирсона?
15. Приведите обобщенные структурные схемы оптимальных обнаружителей/
16. Приведите выражение для отношения правдоподобия в случае обнаружения детерминированного сигнала на фоне БГШ.
17. Приведите структурные схемы оптимальных обнаружителей сигнала на фоне БГШ.
18. Каким образом выбирается порог сравнения при обнаружении по критерию Неймана-Пирсона детерминированного сигнала на фоне БГШ?
19. Приведите выражение для вероятности ложной тревоги и правильного обнаружения при обнаружении детерминированного сигнала на фоне БГШ.
20. Чем однозначно определяются вероятности ложной тревоги и правильного обнаружения при обнаружении детерминированного сигнала на фоне БГШ?
21. Дайте определение кривым обнаружения сигнала.
22. Дайте определение пороговому сигналу.
23. Перечислите особенности обнаружения биологических сигналов.
24. Каким образом можно выбрать опорный сигнал при не полностью известных параметрах биологического сигнала?
25. Какая особенность при выборе порога сравнения для обнаружения биологических сигналов?
Дата добавления: 2019-02-22; просмотров: 106; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!