Тележка с автономным управлением
Теперь давайте разберемся с полезным грузом. Для начала поставим задачу, чтобы тележка смогла вывезти сама себя. Микроконтроллер NXT с шестью аккумуляторами весит немало. Разместим его на корпусе тележки (рис. 3.15—3.20). В следующей версии массу груза можно будет довести до килограмма или двух.
Установка шестеренок и колес для полноприводной тележки уже знакома по предыдущей модели, поэтому вдаваться в детали не станем (рис. 3.21-3.23).




Рис. 3.15. Повторение основы тележки.
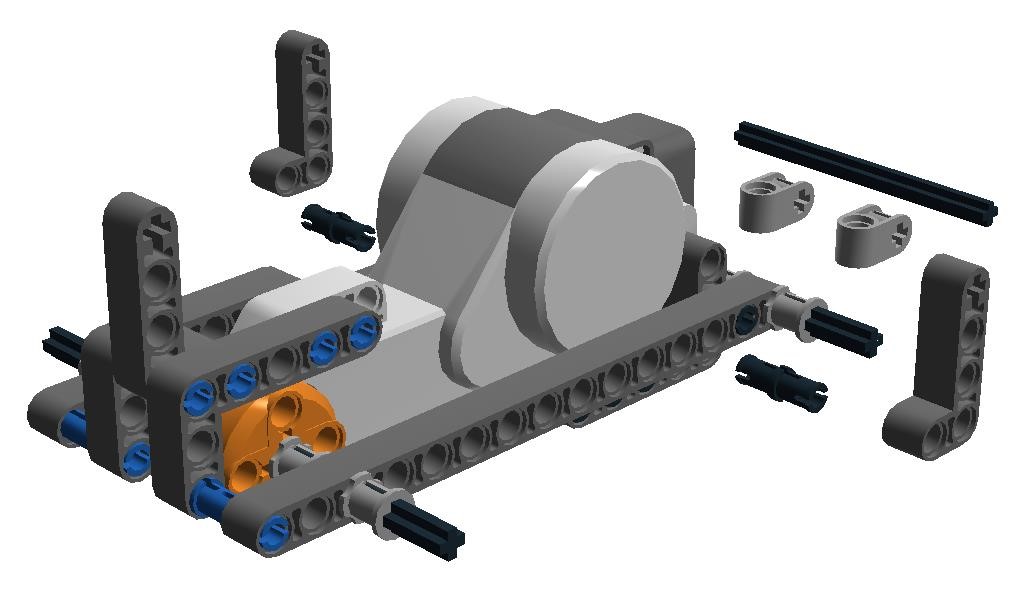
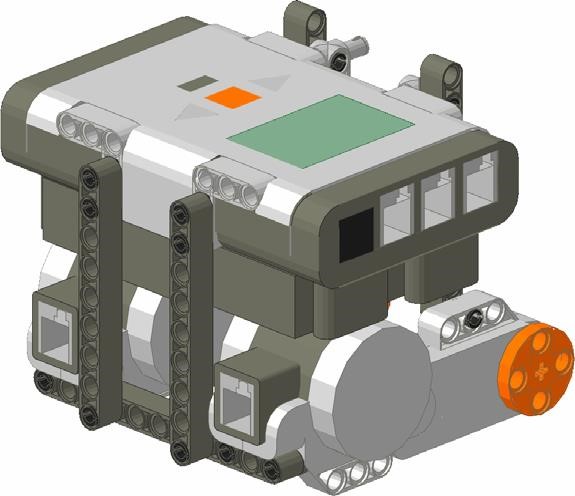
Рис. 3.16. Заднее крепление для NXT на базе одномоторной тележки.
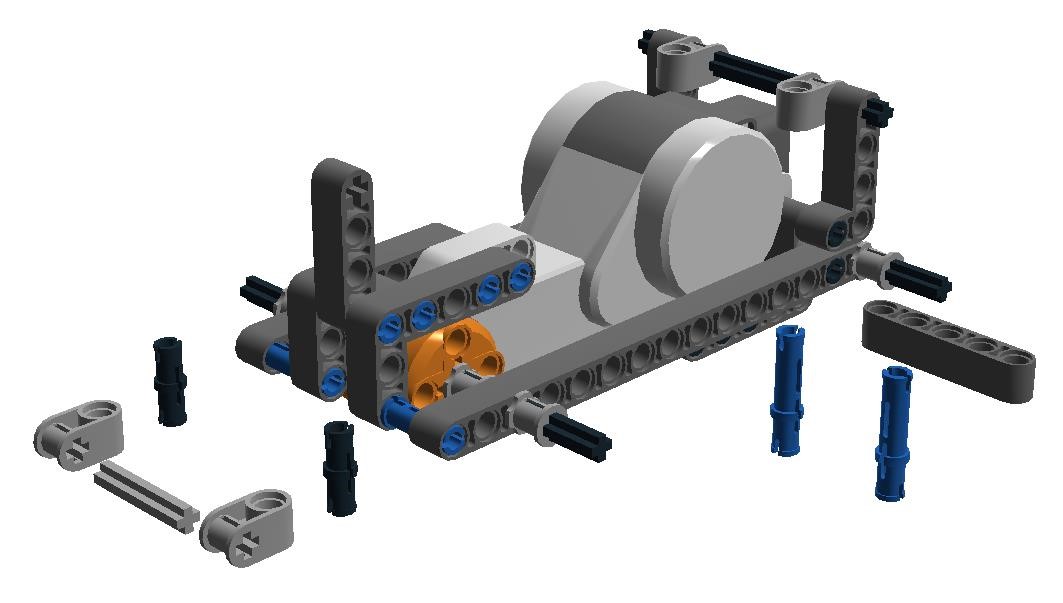
Рис. 3.17. Установка вертикальных штифтов для крепления к NXT снизу.
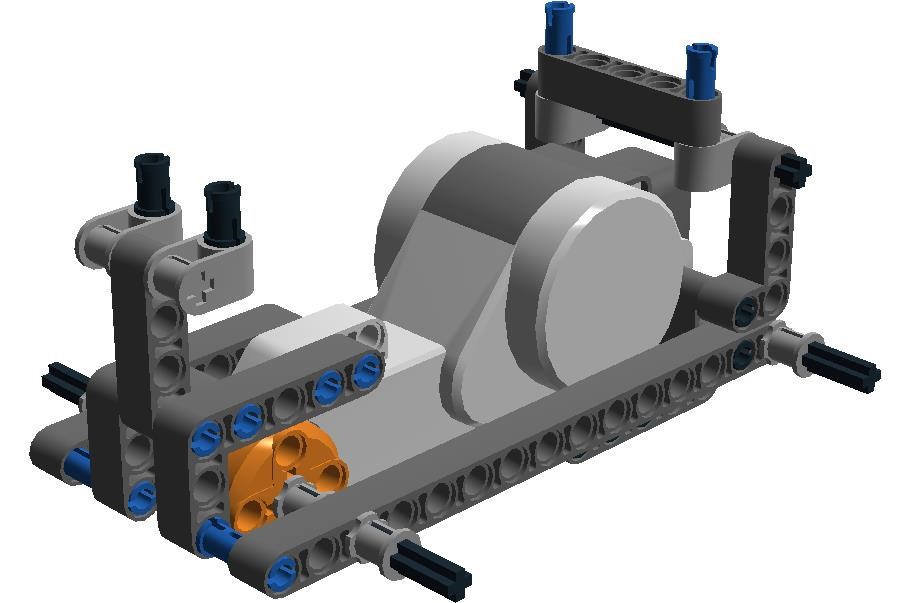
Рис. 3.18. Можно ставить контроллер.
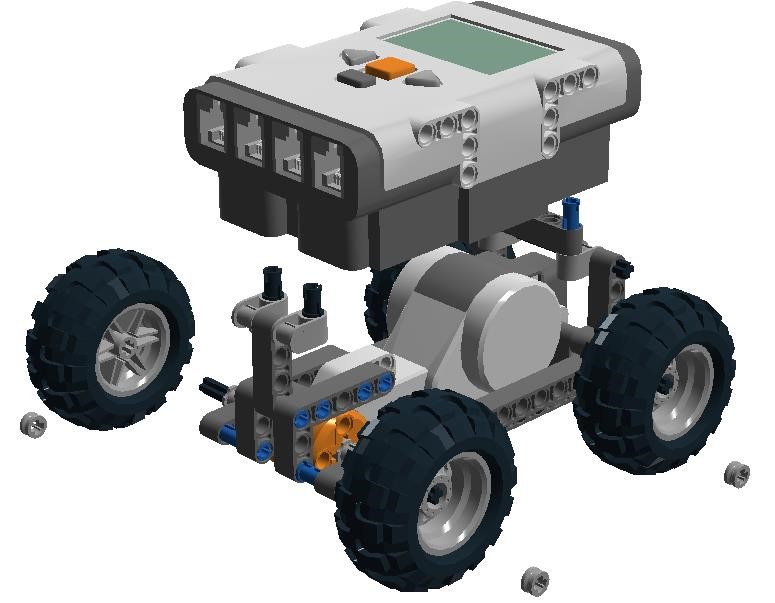
Рис. 3.19. Для надежности колеса закрепляются полувтулками.

Рис. 3.20. Мотор подключается на порт B.
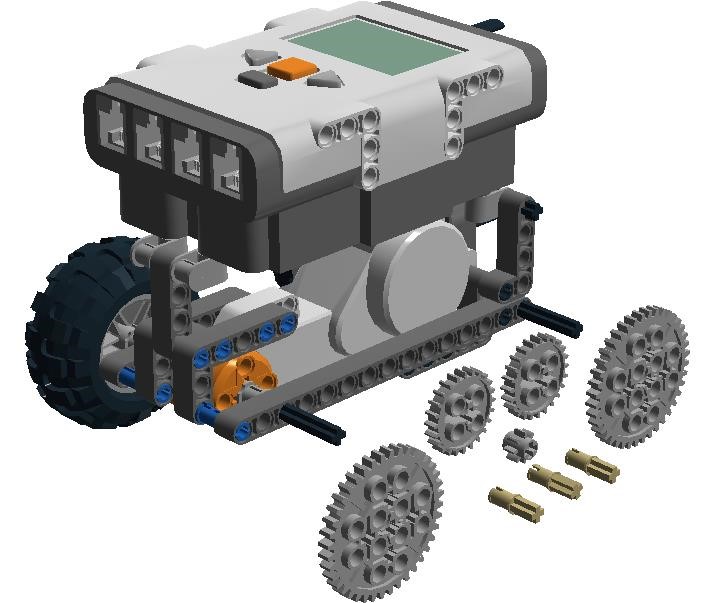
Рис. 3.21. Установка полного привода.
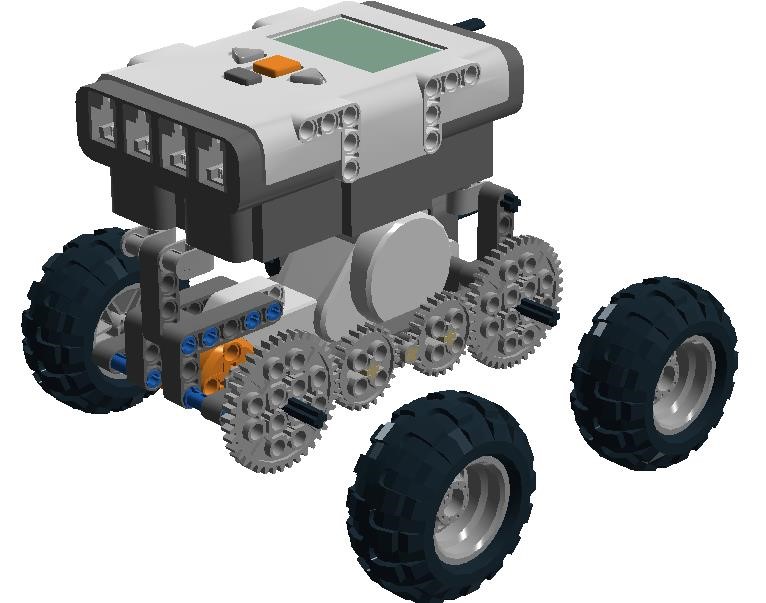
Рис. 3.22. Установка колес возможна с удлинителями осей.
Если вы до сих пор еще не начали программировать на NXT, то простую инструкцию по движению одно- или двухмоторной тележки найдете в начале данной главы. При запуске берегите пальцы – зубцы шестеренок соприкасаются с большой силой!

Рис. 3.23. Вид сбоку.
Тележка с изменением передаточного отношения
Итак, первая задача выполнена, тележка тронулась с места. Теперь попытаемся сделать из нее гоночный автомобиль. Понятно, что нагружать ее при этом пока не будем. Для увеличения скорости достаточно увеличить передаточное отношение (рис. 3.26).
Приступим к строительству. Необходимо снять с предыдущей модели колеса, шестеренки и несущие балки (рис. 3.24), модифицировав конструкцию (рис. 3.25—3.26).
Попробуйте поэкспериментировать. Можно заметить, что при достаточно высоком передаточном числе тележка просто не тронется с места: ее придется самим разгонять и подталкивать. А в приподнятом состоянии колеса будут крутиться быстро-быстро. Чего же не хватает? Очевидно, тяговой силы. Выиграв в скорости, мы потеряли в силе — моторам уже не хватает мощности для старта. Автомобилисты сталкиваются с этим при переключении коробки передач. Самое большое усилие развивается на низких передачах. Воспользуемся ими.
Двухмоторная тележка
Трехточечная схема
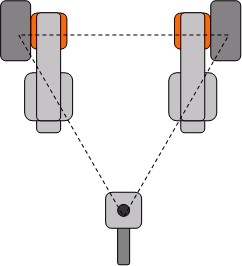 Это самая распространенная разновидность роботов. Тележка может быть с тремя точками опоры, две из которых — ведущие колеса, а третья — волокуша, или свободно вращающееся колесико (рис. 3.71). Такие модели являются базовыми для наборов 8527 и 9797. Инструкции по
Это самая распространенная разновидность роботов. Тележка может быть с тремя точками опоры, две из которых — ведущие колеса, а третья — волокуша, или свободно вращающееся колесико (рис. 3.71). Такие модели являются базовыми для наборов 8527 и 9797. Инструкции по
сборке прилагаеются. Если попытае-
тесь построить такую тележку само-
стоятельно, помните, что центр масс Рис. 3.71. Схема трехколесной должен находиться не над волоку- тележки с подвижным третьим шей, а ближе к ведущим колесам. колесом.
Именно по этой схеме построена стандартная тележка из наборов 8527 и 9797 (рис. 3.72). В инструкциях этих наборов есть небольшие различия, но суть одна.

Рис. 3.72. Стандартная основа для робота из набора 9797.
Для тех, кто не хочет ограничиваться базовыми конструкциями, рассмотрим несколько примеров крепления моторов к NXT. От них можно отталкиваться при создании собственных роботов. Второй пример любезно предоставлен Центром инженерной поддержки образования на сайте http://www.legoengineering.com [4].
Простейшая тележка
Для придания устойчивости роботу имеет смысл поставить моторы по двум сторонам от NXT. Это несколько расширит корпус тележки
(рис. 3.73).

Рис. 3.73. Широкая тележка — простейший вариант.

Рис. 3.74. Изогнутые балки для крепления моторов.
Предлагаемую конструкцию (рис. 3.74—3.81) можно делать вдвоем — бóльшая часть деталей устанавливается симметрично. А вот на подключение моторов следует обратить внимание. Для совместимости с алгоритмами, изложенными в этой книге, договоримся, что мотор B — слева, а мотор C — справа по курсу движения. На нашей тележке провода придется подсоединить накрест.
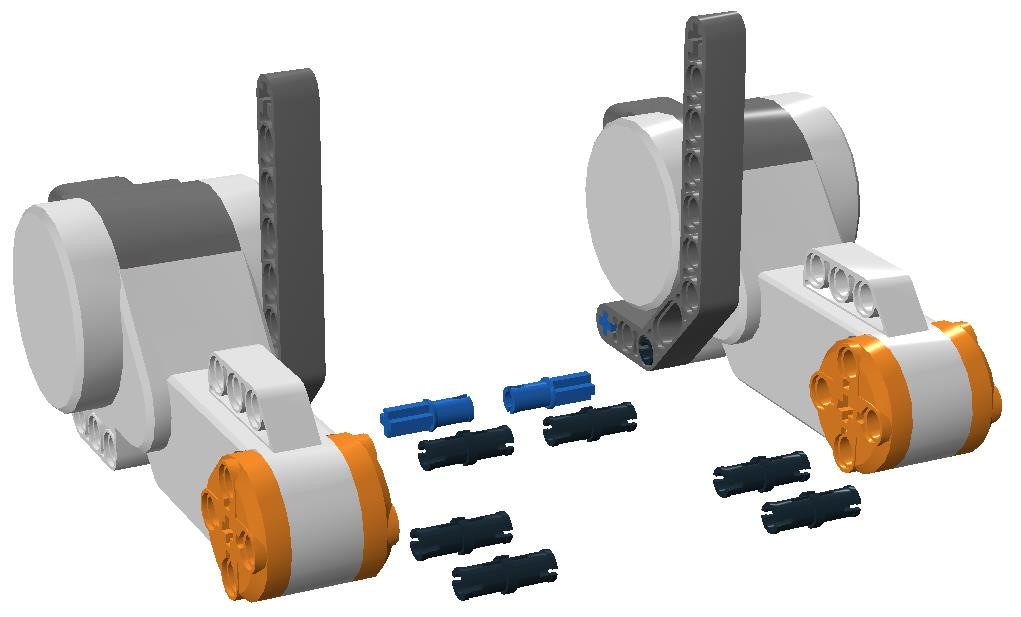
Рис. 3.75. В зависимости от расположения балок может быть смещен центр тяжести тележки.
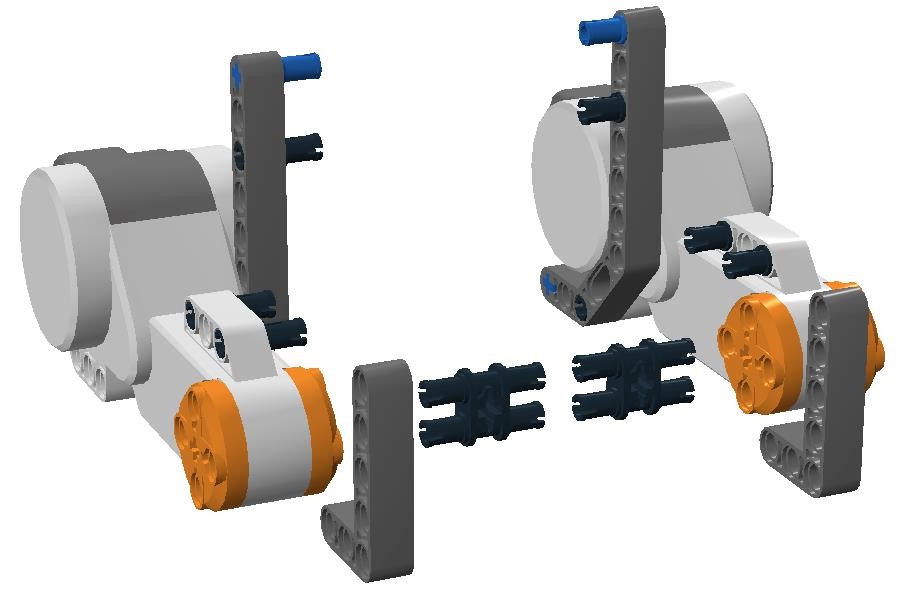
Рис. 3.76. Дополнительные крепления для придания устойчивости.
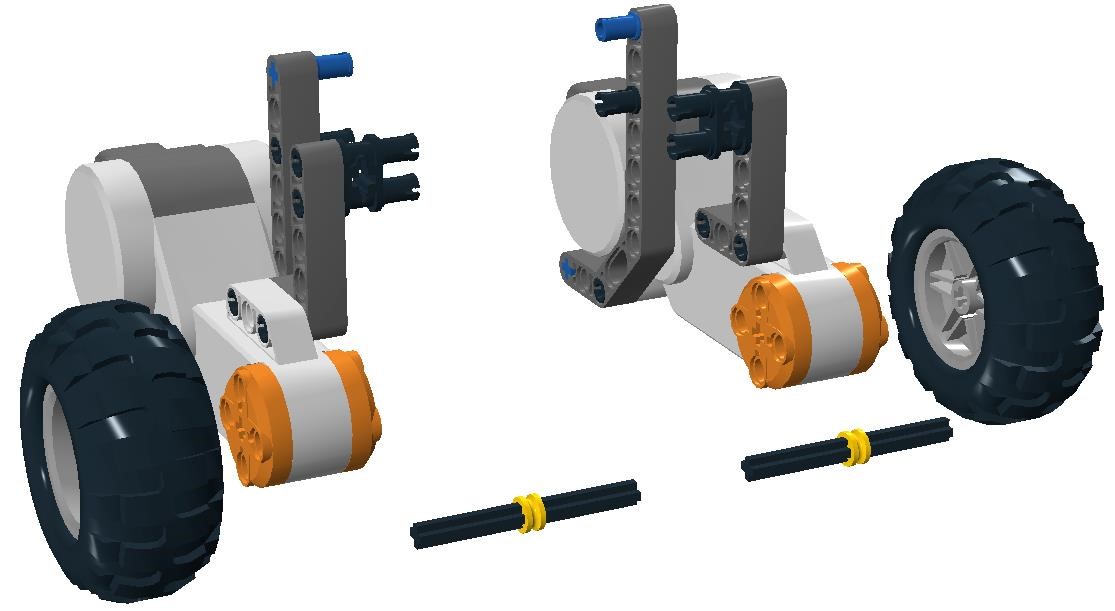
Рис. 3.77. Колеса устанавливаются на 6-модульные оси, втулки предохраняют от нежелательного трения шин о корпуса двигателей.
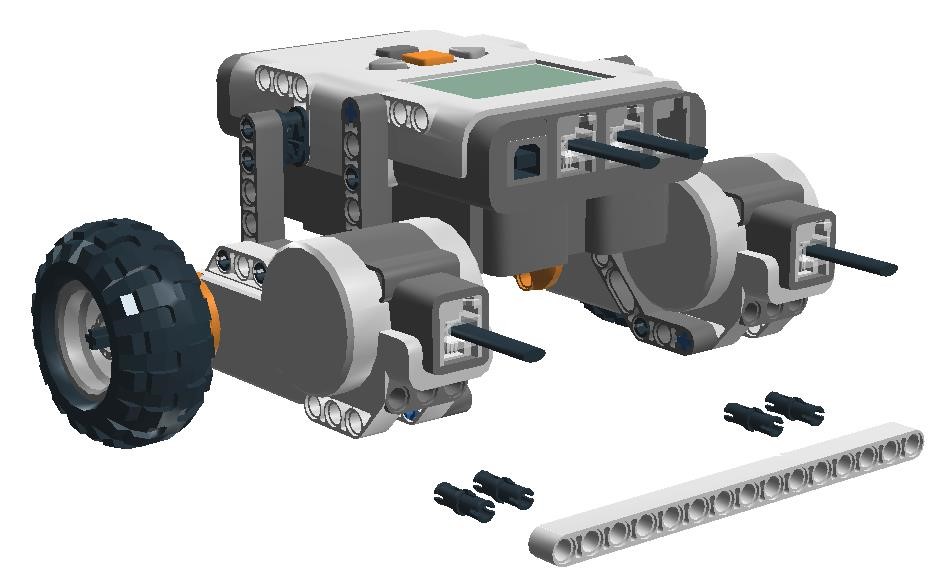
Рис. 3.78. Две половинки соединяются контроллером NXT и 15-модульной балкой, которая крепится к каждому мотору на 2 штифта.

Рис. 3.79. Элементы подвижного колеса. Длины осей — 3 и 5 модулей.

Рис. 3.80. Сборка заднего подвижного колеса. Обе оси должны вращаться свободно.
Простейшая конструкция тележки показана на рис. 3.81, однако в ней есть пара недостатков. Корпус тележки расположен с небольшим наклоном вперед. Если убрать одну втулку из вертикальной оси подвижного колеса, корпус выровняется, но тогда тележка потеряет возможность двигаться назад: колесико начнет цепляться за балку. Замена втулки на полувтулку решит проблему лишь отчасти.
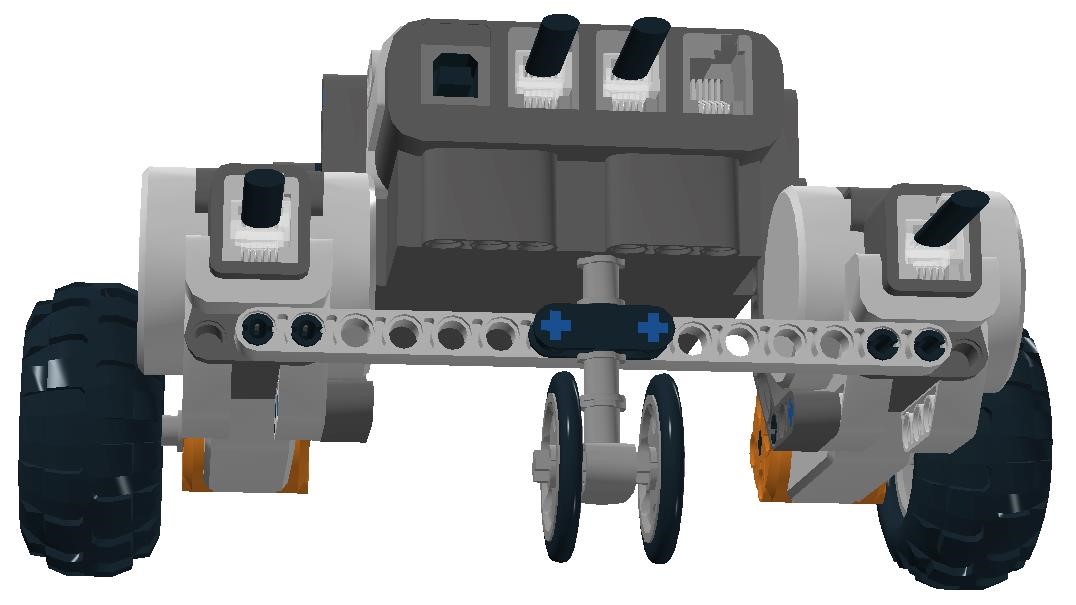
Рис. 3.81. Тележка готова. Она будет слегка наклонена вперед.
Для построения строго горизонтальной тележки воспользуйтесь инструкцией на рис. 3.82—3.85. Задняя 16-модульная балка будет заменена на конструкцию из угловых балок, которая обеспечит более высокий подъем подвижного третьего колеса.
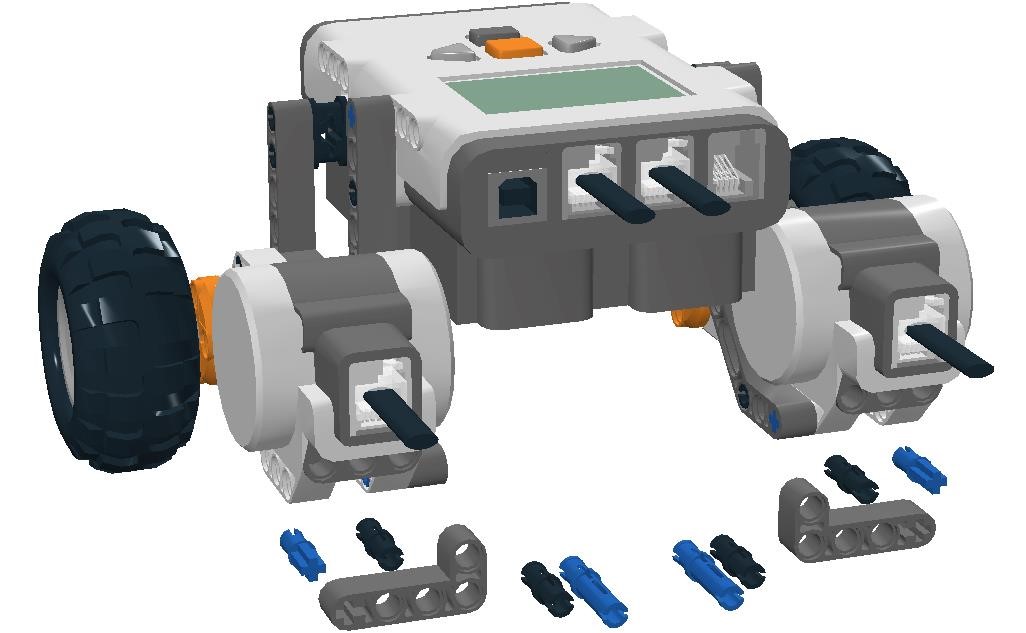
Рис. 3.82. Немного усложним конструкцию, подняв заднее крепление подвижного колеса.
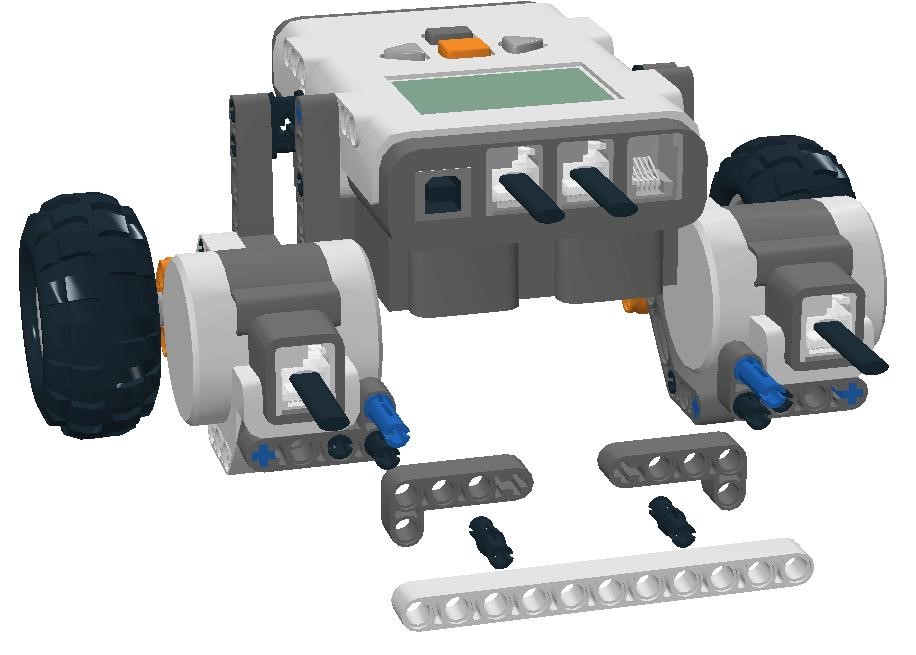
Рис. 3.83. Еще пара уголков, к которым крепится задняя балка.
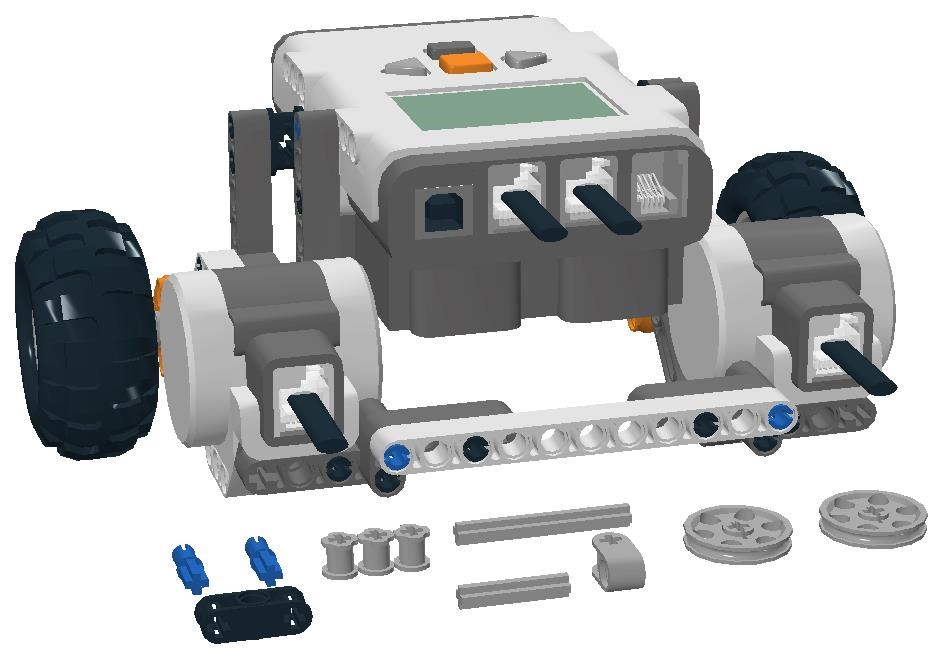
Рис. 3.84. Шины на диски подвижного колеса можно не надевать.
Собрав конструкцию обвязки из балок (рис. 3.92), отложите ее и соедините остальные блоки (рис. 3.93).
 Далее остается прикрепить отложенную обвязку с противоположной стороны (рис. 3.94).
Далее остается прикрепить отложенную обвязку с противоположной стороны (рис. 3.94).
Компактная основа для тележки готова. Надо учесть, что при штатном Lego-аккумуляторе придется увеличить высоту вертикальных скрепляющих балок, поскольку он выступает на высоту одного модуля из корпуса NXT.
Если в наборе найдутся гусе-
ницы, то лучшего варианта для гу- сеничной тележки не придумать. Рис. 3.94. Установка обвязки [4].
Полный привод
Можно сделать двухмоторную тележку, опирающуюся на четыре колеса, попарно соединенных с моторами. На улицах небольшого города встречаются подобные автомобили-погрузчики или электрокары. От своих собратьев с рулевым управлением они отличаются высокой маневренностью: способны выполнять поворот на месте. А от трехколесной тележки — высокой проходимостью.
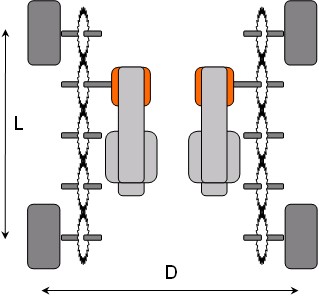
Рис. 3.95. Схема четырехколесной тележки [4].
Чтобы построить двухмоторную четырехколесную тележку с полным приводом, необходимо сконструировать механическую передачу с каждого мотора на оба боковых колеса (рис. 3.95). Если привод будет только на одно из колес с каждой стороны, то поворота, скорее всего, не будет из-за бокового трения второго колеса. Кроме того, расстояние между колесами по одной стороне L не дожно превышать расстояния между сторонами D: L ≤ D.
Эта задача интересна, и читатель может попробовать решить ее самостоятельно, тем более что пример одномоторной тележки детально разобран. Остается расширить корпус добавлением второго мотора. Не забывайте только соблюдать четность и размеры шестеренок, чтобы колеса крутились в одну сторону с одинаковой скоростью.
Испробовав на готовой тележке небогатый арсенал NXT Program, читатель может приступить к серьезному программированию и выбрать задачу себе по вкусу: либо изучить какую-нибудь из предложенных сред (NXT-G в главе 4, Robolab в главе 5, RobotC в главе 6), либо, уже имея навыки программирования, освоить алгоритмы управления из главы 7, или сразу начать решать задачи для робота из главы 8.
Дата добавления: 2019-02-22; просмотров: 1155; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!