Закономерности смены поколений авиационной техники и методы
Технологического обеспечения её конкурентоспособности
Главным критерием технического уровня самолета – истребителя во всех случаях является максимальная скорость полета (Vmax, км/ч), а для реактивных авиационных двигателей – тяга .
На основании сказанного в инновационных проектах можно построить S– образные кривые смены поколений изделий (продуктовых инноваций), например, авиационных двигателей (рис.2.1) для отечественных самолетов – истребителей[13].
Из рис.2.1. можно сделать вывод о том, что авиационные двигатели для многофункциональных высокоманевренных самолетов-истребителей (истребителей-бомбардировщиков) в настоящее время утрачивают свои конкурентные преимущества в сравнении с лучшими отечественными и зарубежными аналогами. Отставание по тяге составляет приблизительно 4 тс, что является «узким местом». Таким образом, в инновационном проектировании одной из главных задач создания авиационного двигателя пятого поколения должно быть повышение тяги при тех же или меньших массо-габаритных параметрах.
Таблица 2.1
Закономерности развития авиационных двигателей отечественной истребительной авиации
| Уравнения регрессии сигмоидального типа | Критерий согласия | ||
| Двигатели дозвуковых самолетов-истребителей (P – тяга двигателя, кг.) : | |||
| P(t)=930*arctg(t-1948)+1900 | R2=0,7957 | ||
| Двигатели сверхзвуковых истребителей-перехватчиков: | |||
| P(t)=5700*arctg(t-1957)+9800 | R2=0,7076 | ||
| Двигатели самолетов-истребителей вертикального взлета
и посадки | |||
| P(t)=3900*arctg(t-1985)+11650 | R2=0,9515 | ||
| Двигатели многофункциональных высокоманевренных истребителей (истребителей-бомбардировщиков | |||
| P(t)=4000*arctg(t-1965)+8450 | R2=0,8780 | ||
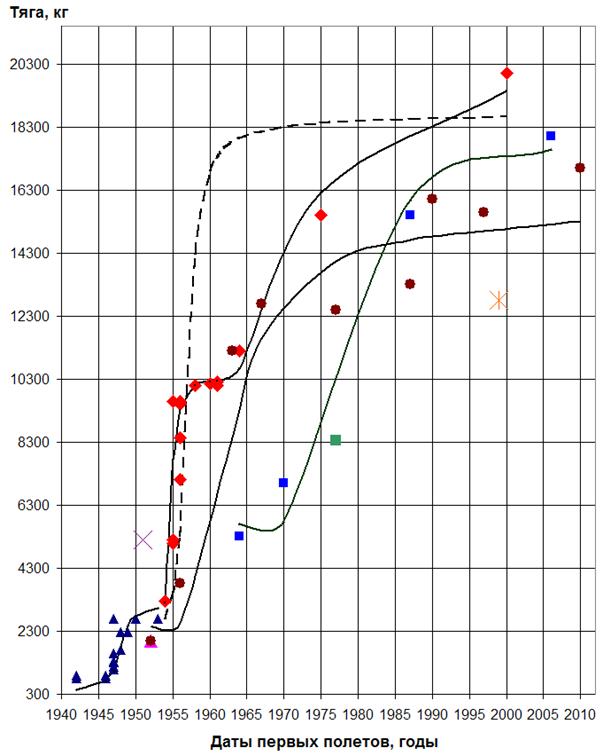
Рис.2.1. Обобщенные закономерности развития авиационных двигателей отечественной истребительной авиации
Далее выполним компоновку РТК и с помощью методов искусственного интеллекта решим задачу по нахождению максимальной скорости самолетов-истребителей отечественной авиации.
Компоновка робототехнического комплекса методом
аддитивной свертки критериев в Matlab
Роботизация производственных процессов
Роботизация производственных процессов в инновационной деятельности предполагает использование автоматических манипуляторов с программным управлением для создания роботизированных технологических комплексов, роботизированных производственных участков, гибких производственных участков и гибких автоматизированных линий. Данное направление комплексной автоматизации позволяет, в конечном счете, создать системы автоматически действующих машин, которые в сочетании с роботами могут реализовать всю технологию производства за исключением функций управления и контроля, сохраненных за человеком. В проектах технического перевооружения или комплексной
|
|
|
автоматизации компоновка робототехнических комплексов (РТК) должна учитывать особенности обоснования их структур. Названные технологические комплексы, оснащенные автоматическими манипуляторами с программным управлением, могут компоноваться по трем основным схемам:
- бригада промышленных роботов;
- система многостаночного обслуживания промышленным роботом;
- тандем, когда один промышленный робот обслуживает одну
единицу технологического оборудования.
В первом случае бригаду промышленных роботов создают путем разделения вспомогательных переходов одной операции между несколькими промышленными роботами. Технологические переходы в данном случае выполняет одна единица технологического оборудования. Такая ситуация возникает в многопереходных технологических операциях, где время вспомогательных переходов (если их выполняют промышленные роботы) значительно больше основного времени работы оборудования.
При компоновке систем многостаночного обслуживания промышленными роботами, с которыми чаще всего приходится сталкиваться в проектах комплексной автоматизации механической обработки, гальванопокрытий, основное время выполнения технологических переходов операций, как правило, значительно больше времени выполнения вспомогательных переходов. В этом случае возникают длительные простои промышленного робота, если он не включен в систему много-станочного обслуживания нескольких единиц автоматического технологического оборудования. В связи с тем, что такие ситуации весьма часто возникают в проектно-технологической практике, в процессе работы были рассмотрены компоновочные расчеты систем многостаночного обслуживания промышленными роботами. На основании этого с помощью системы КОМПАС разработали и начертили компоновку РТК, согласно своему варианту.
|
|
|
Дата добавления: 2019-02-13; просмотров: 330; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!