Основные теоретические сведения.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Учреждение образования
“Брестский государственный технический университет”
Кафедра автоматизации технологических процессов и производств
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ
по выполнению электротехнических расчетов
с примерами решения типовых задач
для студентов неэлектротехнических специальностей
очной и заочной форм обучения.
Часть 2.
Электрические машины.
Брест 2007
УДК 621.313(076.1)
Методические рекомендации по выполнению электротехнических расчетов с примерами решения типовых задач для студентов неэлектротехнических специальностей очной и заочной форм обучения. Часть 2. Электрические машины.
В пособии кратко изложены основные теоретические вопросы с конкретными примерами типовых расчетов по разделу «Электрические машины» электротехнических дисциплин для неэлектротехнических специальностей вузов. Содержание изложенного в пособии материала соответствует действующим программам и предназначено для использования студентами (очной и заочной форм обучения) при самостоятельном выполнении типовых электротехнических расчетов, предусмотренных заданиями контрольных и расчетно-графических работ.
Составители: О.Н. Прокопеня, к.т.н., доцент,
И.М. Панасюк, ст. преподаватель.
Рекомендовано кафедрой АТПиП "14 " декабря 2007 г., протокол №4 .
|
|
|
Рецензент: Н.В.Василевский, начальник энергетической инспекции филиала РУП “Брестэнерго-энергонадзор”.

 ©Учреждение образования “Брестский государственный технический университет” 2007
©Учреждение образования “Брестский государственный технический университет” 2007
Оглавление
стр.
Введение…………………………………………...……………………………………….4
Общие указания и требования к решению и оформлению задач…………………4
1. Основные теоретические сведения.……………………………………………...…5…7
2. Трансформаторы………………………………………………………………………8…21
3. Машины постоянного тока……………………………………………...………….21…30
4. Машины переменного тока…………………………………………………………31…38
Литература………………………………………………………………………………….38
Введение.
Важное значение при изучении любой дисциплины имеет самостоятельная работа студента с литературой и закрепление теоретических знаний посредством решения конкретных практических задач.
Настоящее пособие предназначено для студентов неэлектротехнических специальностей очной и заочной форм обучения. Задача пособия – оказание методической помощи студенту в выполнении расчетно-графических (РГР) и контрольных работ (КР) при изучении курсов “Электротехника”, ”Электротехника и основы электроники”, ”Электротехника, электрические машины и аппараты”, ”Электротехника и основы электропривода”.
|
|
|
Пособие содержит краткие теоретические сведения, методические указания и примеры решения задач по расчету магнитных и электрических цепей трансформаторов, электрических машин постоянного и переменного тока. Решения задач сопровождаются схемами, графиками, диаграммами, что облегчает восприятие получаемых результатов. Содержание материала представленного в пособии соответствует действующим программам вышеперечисленных дисциплин.
Общие указания и требования к решению и оформлению задач.
При выполнении и оформлении задач необходимо придерживаться следующих рекомендаций:
· Прежде, чем приступить к выполнению задания, необходимо изучить теоретический материал соответствующего раздела дисциплины, рекомендуемый в методических указаниях (МУ) к заданию.
· После внимательного прочтения условия задачи следует записать исходные данные для своего варианта и приступить к выполнению задания в последовательности, указанной в МУ.
· Текст решения разборчиво записывается на пронумерованных страницах с одной стороны листа. Обратные стороны предназначены для исправлений допущенных ошибок. Для замечаний преподавателя на каждой странице необходимо оставлять справа поле шириной 3 см.
|
|
|
· В решениях, где это требуется, необходимо приводить чертежи, графики, диаграммы и схемы, выполненные чертежным инструментом в соответствии с ГОСТ.
· При выполнении расчетов сначала записывается исходная формула, затем в нее подставляются значения входящих величин и приводится конечный результат. Вывод формул, имеющихся в используемой литературе, приводить не следует. Не следует также загромождать решение приведением всех алгебраических преобразований. В случае выполнения математических расчетов на персональном компьютере (ПК), в приложениях к заданию следует привести распечатку машинного решения задачи.
· Все результаты вычислений должны быть записаны с точностью до четырех значащих цифр и указанием единицы измерения величины.
· В конце решения задачи следует привести результаты расчетов в виде таблицы.
Основные теоретические сведения.
Технологические машины и агрегаты приводятся в действие различными типами приводов, из которых наиболее распространенным является электропривод. От правильного выбора параметров и характеристик привода зависит эффективность работы технологической установки, поэтому его расчет и проектирование представляет собой важную инженерную задачу.
|
|
|
Электропривод содержит большое число компонентов, основным из которых является электрическая машина.
Вращающейся электрической машиной (ГОСТ 27471-87) называется электротехническое устройство, предназначенное для преобразования энергии на основе электромагнитной индукции и взаимодействия магнитного поля с электрическим током, содержащее части, которые участвуют в основном процессе преобразования и могут вращаться или поворачиваться относительно друг друга.
Любая электрическая машина может работать как в двигательном, так и в генераторном режимах. Однако изначально электрические машины проектируются и изготовляются для использования либо в качестве двигателя, либо в качестве генератора.
Электромашинные генераторы – устройства, преобразующие механическую энергию в электрическую. Их используют для получения электрической энергии. На электростанциях они приводятся в движение от паровых или гидравлических турбин, в различных транспортных устройствах (автомобилях, тепловозах, кораблях, самолетах и др.) - от двигателей внутреннего сгорания и газовых турбин.
Электрические двигатели – устройства, преобразующие электрическую энергию в механическую. Они используются в приводах различных машин и механизмов. Следует иметь в виду, что электродвигатели, используемые в составе приводов, в определенные периоды могут работать в генераторном режиме с отдачей энергии в сеть, что обеспечивает экономию электроэнергии и улучшает экономические показатели электропривода.
Двигатели и генераторы являются наиболее распространенными видами электрических машин. В технике также используются машины, имеющие специфическое функциональное назначение, и соответственно, менее распространенные. К ним относятся:
- электромашинные преобразователи – устройства, преобразующие переменный ток в постоянный и наоборот (они позволяют изменять величину напряжения и тока, частоту, число фаз и др.);
- электромашинные компенсаторы – устройства, осуществляющие генерирование реактивной мощности;
- электромашинные усилители – устройства, позволяющие управлять относительно большими мощностями с помощью сигнала малой мощности;
- тахогенераторы – электрические микромашины, работающие в генераторном режиме и используемые для измерения частоты вращения.
Все электрические машины в зависимости от мощности подразделяют на микромашины (от долей ватта до 500 Вт), машины малой мощности (от 0,5 до 10 кВт), машины средней мощности (от 10 кВт до нескольких сотен киловатт) и машины большой мощности (свыше нескольких сотен киловатт).
В зависимости от рода используемого тока электрические машины подразделяют на машины переменного и машины постоянного тока.
Электрические машины постоянного тока вырабатывают или преобразуют энергию постоянного тока. Генераторы, электродвигатели, электромашинные усилители и тахогенераторы постоянного тока используются в регулируемых электроприводах станков, транспортных устройств и др. В металлорежущих станках широко применяются высокомоментные двигатели постоянного тока.
Электрические машины переменного тока вырабатывают или преобразуют энергию переменного тока. Они подразделяются на синхронные и асинхронные машины..
Синхронные машины применяют в качестве генераторов переменного тока промышленной частоты на электростанциях и в качестве генераторов повышенной частоты в автономных источниках питания (на кораблях, самолетах т.п.). В качестве электродвигателей синхронные машины применяют в электроприводах механизмов, требующих стабильной частоты вращения. Синхронные двигатели большой мощности используются также в качестве компенсаторов реактивной нагрузки. К синхронным относятся также шаговые двигатели, которые находят применение в приводах станков и приборных устройствах.
Асинхронные машины используют главным образом в качестве электрических двигателей. Наиболее широко применяемым является трехфазный асинхронный электродвигатель с короткозамкнутым ротором. Он используется в нерегулируемых приводах различных механизмов, компрессоров, насосов, вентиляторов и пр., а в последнее время – и в регулируемых приводах в сочетании с преобразователями частоты на полупроводниковых элементах. В системах автоматического регулирования используются также одно- и двухфазные асинхронные двигатели, а в качестве измерительных устройств - асинхронные тахогенераторы и сельсины.
Наряду с электрическими машинами в технике широко применяются электростатические устройства различного назначения: трансформаторы, дроссели (реакторы), магнитные усилители и т.д. Они не содержат подвижных частей, и поэтому не могут быть отнесены к электрическим машинам.
Трансформатором называется статическое электромагнитное устройство, имеющее две или большее число индуктивно связанных обмоток и предназначенное для преобразования посредством электромагнитной индукции одной или нескольких систем переменного тока в одну или несколько систем переменного тока (ГОСТ 16110-82).
Трансформаторы (однофазные и трехфазные)широко применяют для преобразования напряжения в системах передачи и распределения электроэнергии, во вторичных источниках питания. В электроприводах в качестве измерительных устройств находят применение трансформаторы тока и вращающиеся трансформаторы.
Реакторы или дроссели используют в качестве индуктивной нагрузки для ограничения тока, а также для сглаживания пульсаций в приводах постоянного тока с тиристорным управлением и вторичных источниках электропитания.
Магнитные усилители применяются для усиления мощности электрических сигналов (часто в сочетании с тиристорными усилителями в качестве первой ступени).
Помимо выше упомянутых устройств в состав электропривода входит различная аппаратура, выполняющая функции выработки и подачи управляющих команд, защиты и т.п.
Электротехнические аппараты – устройства, предназначенные для управления потоками энергии и информации, а также режимами работы, контроля и защиты электротехнических систем и их компонентов. Все аппараты осуществляют свои функции постредством управления режимом работы электрической цепи. В зависимости от того, каким способом это осуществляется, они подразделяются на два вида: контактные и бесконтактные.
Бесконтактные аппараты строятся на основе полупроводниковых элементов (тиристоров, транзисторов), магнитных усилителей и др. Как правило, бесконтактная аппаратура проектируется для конкретного привода индивидуально и может быть достаточно сложной.
Контактные аппараты имеют в своем составе механические контакты, с помощью которых производится коммутация электрической цепи. Переключение контактов может осуществляться различными способами: воздействием руки оператора (переключатели, кнопочные выключатели, рубильники, тумблеры и др.), подвижным звеном механизма (путевые и конечные выключатели), электромагнитом (реле, магнитные пускатели).
Контактные аппараты представляют собой унифицированные устройства, серийно выпускаемые промышленностью в широком ассортименте. На их основе строятся простые нерегулируемые приводы, но они также используются в составе сложных регулируемых приводов для выполнения определенных функций. Поэтому важной задачей проектирования является расчет требуемых параметров и выбор соответствующего типоразмера аппарата для работы в конкретной электрической цепи.
Основными параметрами электроконтактных устройств являются номинальные значения тока и напряжения контактов, род тока, а для устройств с электромагнитным управлением также – номинальное напряжение катушки. Для контактных устройств могут учитываться дополнительные параметры, которые указываются в паспорте или сопроводительных документах. Значения параметров аппаратуры приводятся также в специализированных каталогах и справочниках.
В зависимости от значений указанных параметров различают аппаратуру: слаботочную (до 5 А) и сильноточную (свыше 5 А); низкого (до 1000 В) и высокого напряжения (свыше 1000 В); низкой (до 50 Гц) и повышенной (от 400 до 10000 Гц) частоты напряжения.
В зависимости от назначения электротехнические аппараты условно подразделяют на коммутационные и защитные.
Коммутационная аппаратура (рубильники, выключатели, контроллеры, разъединители, контакторы и др.) предназначена для подключений, отключений и переключений, выполняемых в электрических цепях электротехнических устройств в процессе их эксплуатации.
Защитная аппаратура (предохранители, устройства автоматического отключения, тепловые реле, реле максимального тока и др.) предназначена для предотвращения выхода из строя электротехнических устройств и защиты обслуживающего персонала в аварийных ситуациях.
Защитные аппараты могут иметь тепловой, электромагнитный или комбинированный расцепитель. Тепловой расцепитель обладает инерционностью и используется для защиты от длительных перегрузок небольшой величины. Электромагнитный расцепитель имеет высокое быстродействие и позволяет осуществлять защиту от коротких замыканий. Зависимость времени срабатывания аппарата от тока определяется его характеристикой, которая приводится в паспорте.
Трансформаторы.
Принцип действия трансформатора основан на явлении электромагнитной индукции. Оно возникает при изменении тока в обмотках, поэтому обмотки трансформатора включаются либо в цепи переменного тока, либо в цепи пульсирующего тока (для импульсных трансформаторов). В обоих случаях преобразование тока осуществляется без изменения частоты.
Основными составными частями трансформатора являются: первичная обмотка, подключаемая к источнику электроэнергии, одна или несколько вторичных обмоток, к которым подключаются потребители электроэнергии или другие внешние цепи и магнитопровод (сердечник), передающий энергию посредством магнитного поля от первичной обмотки к вторичной. В трехфазном трансформаторе обмотки являются трехфазными. Каждая такая обмотка состоит из трех однофазных обмоток, соединенных по соответствующей схеме (“звезда” или “треугольник”).
Несмотря на различия в конструкции и назначении, у всех трансформаторов принцип работы, а также уравнения электрического и магнитного состояния, одинаковы.
Работает трансформатор следующим образом (см. рис. 2.1). При подключении первичной обмотки двухобмоточного трансформатора, имеющей  витков, к сети с напряжением
витков, к сети с напряжением  в этой обмотке возникает переменный ток
в этой обмотке возникает переменный ток  , который создает переменный магнитный поток
, который создает переменный магнитный поток  , проходящий по замкнутому магнитопроводу.
, проходящий по замкнутому магнитопроводу.
 |
|
 Поток индуцирует в обеих обмотках переменные э.д.с.
Поток индуцирует в обеих обмотках переменные э.д.с.  и
и  , пропорциональные, согласно закону электромагнитной индукции, числам витков
, пропорциональные, согласно закону электромагнитной индукции, числам витков  и
и  соответствующих обмоток и скорости изменения потока
соответствующих обмоток и скорости изменения потока  . Таким образом, мгновенные значения э.д.с., индуцированных в каждой обмотке
. Таким образом, мгновенные значения э.д.с., индуцированных в каждой обмотке

 (2.1)
(2.1)
При этом отношение действующих мгновенных значений э.д.с. в обмотках
 (2.2)
(2.2)
Поскольку падения напряжений в обмотках трансформатора обычно не превышают 3 – 5 % от номинальных значений, то номинальные напряжения можно считать  и
и  . Тогда
. Тогда
 (2.3)
(2.3)
Следовательно, подбирая соответствующим образом число витков обмоток, можно при заданном напряжении  получить желаемое напряжение
получить желаемое напряжение  (при >
(при >  получим >
получим >  , в этом случае трансформатор называют понижающим, при <
, в этом случае трансформатор называют понижающим, при <  - < , а трансформатор называют повышающим).
- < , а трансформатор называют повышающим).
Отношение э.д.с.  обмотки высшего напряжения к э.д.с.
обмотки высшего напряжения к э.д.с.  обмотки низшего напряжения (или отношение чисел витков соответствующих обмоток), называют коэффициентом трансформации
обмотки низшего напряжения (или отношение чисел витков соответствующих обмоток), называют коэффициентом трансформации
 (2.4)
(2.4)
Для возможности совместного рассмотрения процессов в первичной и вторичной обмотках, вторичные обмотки трансформаторов обычно приводят к первичной, которую принимают за базисную. Смысл приведения состоит в том, что действительную вторичную обмотку заменяют фиктивной, имеющей то же число витков, что и первичная. Приведение заключается в пересчете напряжения, э.д.с., тока и сопротивления вторичной обмотки к базисной. Оно производится по формулам
 ,
,
где  - напряжение, э.д.с., ток, активное, индуктивное и полное сопротивления вторичной обмотки.
- напряжение, э.д.с., ток, активное, индуктивное и полное сопротивления вторичной обмотки.
 |
Приведение обмоток дает возможность строить схемы замещения, при переходе к которым электромагнитные связи между обмотками заменяются электрическими. На практике используют несколько видов схем замещения. Одна из схем приведена на рис. 2. 2.
Данная схема не отражает сущности явлений, происходящих в трансформаторе, но напряжения и токи в схеме описываются теми же уравнениями, что и для трансформатора. Схемы замещения справедливы для любого режима работы, и их использование позволяет упростить процесс расчета.
Уравнения электрического состояния трансформатора в соответствии с законами Кирхгофа для схемы замещения (рис.2.2) имеют вид
 (2.5)
(2.5)
где  - напряжение, э.д.с., ток, активное, индуктивное и полное сопротивления первичной обмотки;
- напряжение, э.д.с., ток, активное, индуктивное и полное сопротивления первичной обмотки;  - те же величины для вторичной обмотки, приведенные к первичной;
- те же величины для вторичной обмотки, приведенные к первичной;  - приведенное полное сопротивление нагрузки;
- приведенное полное сопротивление нагрузки;  - намагничивающий ток, равный току холостого хода в первичной обмотке.
- намагничивающий ток, равный току холостого хода в первичной обмотке.
Ток холостого хода  , коэффициент трансформации
, коэффициент трансформации  , а также параметры цепи намагничивания трансформатора определяются из опыта холостого хода.
, а также параметры цепи намагничивания трансформатора определяются из опыта холостого хода.
Опыт холостого хода проводят при номинальном значении напряжения первичной обмотки  и отключенной нагрузке (на рис.2.1 переключатель S в положении 0). Так как ток во вторичной цепи отсутствует (
и отключенной нагрузке (на рис.2.1 переключатель S в положении 0). Так как ток во вторичной цепи отсутствует (  ), то падение напряжения и потери мощности во вторичной обмотке равны нулю. Ток в первичной обмотке в режиме холостого хода значительно меньше номинального (у мощных трансформаторов составляет около 5 % от номинального тока
), то падение напряжения и потери мощности во вторичной обмотке равны нулю. Ток в первичной обмотке в режиме холостого хода значительно меньше номинального (у мощных трансформаторов составляет около 5 % от номинального тока  , а у трансформаторов малой мощности – до 40 %), поэтому падением напряжения в первичной обмотке можно пренебречь и считать, что напряжения на обмотках трансформатора равны соответствующим э.д.с. Тогда коэффициент трансформации можно с достаточной точностью определить через напряжения холостого хода обмоток
, а у трансформаторов малой мощности – до 40 %), поэтому падением напряжения в первичной обмотке можно пренебречь и считать, что напряжения на обмотках трансформатора равны соответствующим э.д.с. Тогда коэффициент трансформации можно с достаточной точностью определить через напряжения холостого хода обмоток
 (2.6)
(2.6)
Мощность, потребляемая трансформатором из сети в режиме холостого хода  , рассеивается в магнитопроводе и в первичной обмотке. Поскольку ток
, рассеивается в магнитопроводе и в первичной обмотке. Поскольку ток  мал, а мощность потерь в обмотке, пропорциональная квадрату тока, то можно считать, что
мал, а мощность потерь в обмотке, пропорциональная квадрату тока, то можно считать, что  - это магнитные потери в сердечнике
- это магнитные потери в сердечнике  (ввиду малости потерь в обмотке).
(ввиду малости потерь в обмотке).
Данные потери пропорциональны квадрату магнитного потока, а значит, квадрату напряжения, т.е.
 (2.7)
(2.7)
Поскольку питающее напряжение практически неизменно, то потери мощности в магнитопроводе являются постоянной (паспортной) величиной, независящей от загрузки трансформатора.
По данным опыта холостого хода можно определить также параметры схемы замещения (рис. 2.2):
 (2.8)
(2.8)
В соответствии со вторым законом Кирхгофа уравнения электрического состояния трансформатора для режима холостого хода имеют вид
 (2.9)
(2.9)
Если ко вторичной обмотке трансформатора подключить нагрузку (на рис.2.1 положение I переключателя S), то под действием э.д.с. в ней возникнет ток  и магнитный поток в сердечнике будет создаваться двумя м.д.с. (
и магнитный поток в сердечнике будет создаваться двумя м.д.с. (  - первичной и
- первичной и  - вторичной цепи). Токи
- вторичной цепи). Токи  и
и  смещены по фазе таким образом, что создаваемый ими магнитный поток сохраняется практически постоянным в пределах от холостого хода до номинальной нагрузки. Уравнения электрического состояния нагруженного трансформатора
смещены по фазе таким образом, что создаваемый ими магнитный поток сохраняется практически постоянным в пределах от холостого хода до номинальной нагрузки. Уравнения электрического состояния нагруженного трансформатора
 (2.10)
(2.10)
Для проведения опыта короткого замыкания (на рис.2.1, положение II переключателя S) вторичную обмотку трансформатора замыкают накоротко (  ), а на первичную подают пониженное напряжение
), а на первичную подают пониженное напряжение  , при котором токи в обмотках равны номинальным значениям (
, при котором токи в обмотках равны номинальным значениям (  ). Относительное значение напряжения
). Относительное значение напряжения
 (2.11)
(2.11)
называют напряжением короткого замыкания. Оно обычно составляет 2…8% от номинального и характеризует падение напряжения на обмотках трансформатора в номинальном режиме.
Ввиду малости напряжения короткого замыкания в соответствии с (2.7) потери мощности в магнитопроводе незначительны и можно считать, что вся мощность расходуется на нагрев обмоток. Т.е. мощность трансформатора при коротком замыкании  равна мощности электрических потерь в его обмотках
равна мощности электрических потерь в его обмотках  . Из опыта короткого замыкания можно определить приблизительные значения активных и реактивных сопротивлений обмоток трансформатора
. Из опыта короткого замыкания можно определить приблизительные значения активных и реактивных сопротивлений обмоток трансформатора
 , (2.12)
, (2.12)
где  .
.
Важными эксплуатационными характеристиками трансформатора являются зависимости напряжения и к.п.д. от тока вторичной обмотки  , для расчета которых используют данные опытов холостого хода и короткого замыкания. Эти характеристики часто строят в виде функций от коэффициента нагрузки
, для расчета которых используют данные опытов холостого хода и короткого замыкания. Эти характеристики часто строят в виде функций от коэффициента нагрузки  , производя расчет с помощью следующих соотношений:
, производя расчет с помощью следующих соотношений:
 , (2.13)
, (2.13)
где  - активная,
- активная,  - реактивная составляющие напряжения короткого замыкания, а φ2 – угол сдвига фаз между напряжением и током приемника (cos φ2. – коэффициент мощности). К.п.д. трансформатора
- реактивная составляющие напряжения короткого замыкания, а φ2 – угол сдвига фаз между напряжением и током приемника (cos φ2. – коэффициент мощности). К.п.д. трансформатора
 (2.14)
(2.14)
Преобразование трехфазных напряжений осуществляется с помощью трехстержневых трехфазных трансформаторов, в которых первичная и вторичная обмотки каждой фазы расположены на общем стержне, либо при очень больших мощностях (более 10 МВ·А в фазе) применяют наряду с трехстержневыми трансформаторами систему из трех однофазных трансформаторов. Трансформаторная группа из трех однофазных трансформаторов дороже, чем трехстержневой трехфазный трансформатор той же мощности. Она имеет относительно большие габариты и несколько меньший к.п.д., однако удобнее при транспортировке, монтаже и эксплуатации.
В обоих случаях обмотки фаз высшего и низшего напряжений могут быть соединены «в звезду», «в звезду с выведенной нулевой точкой», «в треугольник» или «в зигзаг с выведенной нулевой точкой». От способа соединения обмоток трансформатора зависит сдвиг фаз между линейными высшим и низшим напряжениями, что является основанием деления трехфазных трансформаторов на группы соединений. Группа соединений обозначается рядом целых чисел: 1, 2, …, 11, 12 (0), что соответствует угловому сдвигу 30º, 60º, …, 330º, 360º (0º) по аналогии с углом между стрелками часов, показывающих время равное группе соединения. Таким образом, для нормальной эксплуатации (особенно при параллельной работе трансформаторов, при использовании измерительных трансформаторов и т. д.) важно знать группу соединения трансформаторов, которая указывается в их паспортных данных наряду с остальными номинальными параметрами. Стандартизированными и наиболее используемыми являются две группы соединений: 0 и 11 – со сдвигом фаз линейных напряжений 0º и 330º и схемами соединения обмоток Y/Y0 – 0; Y/Δ – 11; Y0/Δ – 11. Согласно ГОСТ для однофазных трансформаторов установлена одна стандартная группа соединений – 0.
Соотношение между напряжениями обмоток трехфазных трансформаторов определяют:
1) фазный коэффициент трансформации, равный отношению числа витков  фазы обмотки высшего напряжения к числу витков
фазы обмотки высшего напряжения к числу витков  фазы обмотки низшего напряжения или же отношению фазных напряжений холостого хода этих обмоток
фазы обмотки низшего напряжения или же отношению фазных напряжений холостого хода этих обмоток
 (2.15)
(2.15)
2) линейный коэффициент трансформации, равный отношению линейного напряжения обмотки высшего напряжения к линейному напряжению обмотки низшего напряжения в режиме холостого хода
 (2.16)
(2.16)
Для схем Y/Y и Δ/Δ:  ; для схемыY/Δ -
; для схемыY/Δ -  ; для Δ/Y -
; для Δ/Y -  Фазный коэффициент трансформации зависит только от числа витков обмоток, а линейный - также и от схемы соединения. Это позволяет регулировать вторичное линейное напряжение трансформатора соответствующим изменением схемы соединения его обмоток.
Фазный коэффициент трансформации зависит только от числа витков обмоток, а линейный - также и от схемы соединения. Это позволяет регулировать вторичное линейное напряжение трансформатора соответствующим изменением схемы соединения его обмоток.
Наиболее простым и экономичным является соединение обмоток высшего и низшего напряжений трансформатора «в звезду». При этом каждая из обмоток и ее изоляция (при «глухом» заземлении нулевой точки) рассчитываются на фазное напряжение и линейный ток. Поскольку числа витков обмоток пропорциональны напряжениям, то соединение «в звезду» требует в каждой из обмоток меньшего количества витков, но большего сечения провода. Такое соединение оправдано применять для трансформаторов небольшой и средней мощности (до 1800 кВ·А) при высоких напряжениях. Соединение «в треугольник» целесообразнее применять при больших токах. Поэтому наиболее распространенным для трансформаторов большой мощности является соединение Y/Δ.
Изложенное выше дает возможность решать практические задачи по расчету трансформаторов.
Пример 2.1.
Задания на расчет:
Для однофазного трансформатора с заданными паспортными данными, ко вторичной обмотке которого подключена нагрузка сопротивлением  и коэффициентом мощности
и коэффициентом мощности  определить:
определить:
1) коэффициент трансформации;
2) параметры схемы замещения (  );
);
3) напряжение  и ток в цепи нагрузки.
и ток в цепи нагрузки.
Построить график изменения вторичного напряжения относительно номинального значения в процентах  от
от  при заданной нагрузке.
при заданной нагрузке.
Примечание. Принять, что ток холостого хода трансформатора составляет 7% номинального, (  ), а мощности потерь в первичной и вторичной обмотках одинаковы.
), а мощности потерь в первичной и вторичной обмотках одинаковы.
Исходные данные:
Номинальная полная мощность трансформатора -  .
.
Номинальное первичное напряжение -  .
.
Номинальное вторичное напряжение -  .
.
Мощность потерь в магнитопроводе -  .
.
Мощность электрических потерь в обмотках при номинальной нагрузке  ;
;
Напряжение короткого замыкания в процентах от номинального -  .
.
Решение.
1. Определяем коэффициент трансформации трансформатора:
 .
.
2. Определяем параметры схемы замещения трансформатора, для чего:
- рассчитываем номинальное значение первичного тока
 ;
;
- определяем ток холостого хода трансформатора
 .
.
Тогда при холостом ходе (  ):
):
 ;
;  ;
;
 .
.
В режиме короткого замыкания:
 ,
,
тогда

С учетом последнего из выражений (2.12):

3. Определяем напряжение и ток в цепи нагрузки.
Напряжение на нагрузке по (2.13):  ,
,
где  - процентное снижение вторичного напряжения при заданной нагрузке.
- процентное снижение вторичного напряжения при заданной нагрузке.
Определяем составляющие напряжения короткого замыкания:
- активную:  ;
;
- реактивную:  .
.
Коэффициент нагрузки трансформатора  , где
, где  - первичный ток при заданной нагрузке:
- первичный ток при заданной нагрузке:  ,
,
где 

Тогда  ,
,  .
.
При заданной нагрузке вторичное напряжение


Ток во вторичной цепи трансформатора при этом:  .
.
4. Рассчитываем и строим зависимость изменения напряжения трансформатора от коэффициента мощности нагрузки.
При заданном коэффициенте нагрузки (  0,7) изменяя
0,7) изменяя  , рассчитываем значения
, рассчитываем значения  (см. п.3) и строим график (рис.2.3).
(см. п.3) и строим график (рис.2.3).
Из графика видно, что при активно - индуктивной нагрузке возрастает (выходное напряжение снижается), а при емкостной – может стать отрицательным (выходное напряжение увеличивается).

Пример 2.2.
Задания на расчет:
Для трехфазного трехстержневого трансформатора с заданными паспортными данными:
1) построить схему магнитной цепи с указанием на ней обмоток высшего и низшего напряжений, а так же обозначив их одноименные выводы. Указать условно-положительные направления фазных э.д.с. и магнитных потоков в стержнях каждой фазы;
2) построить принципиальную схему трехфазной электрической цепи трансформатора с подключенной нагрузкой, коммутационными и защитными аппаратами в трехлинейном и однолинейном исполнениях, указав на трехлинейной схеме условно-положительные направления линейных и фазных напряжений и токов;
3) определить значения номинальных фазных напряжений первичных и вторичных обмоток трансформатора;
4) определить фазный и линейный коэффициенты трансформации;
5) пренебрегая током намагничивания и потерями в трансформаторе, определить номинальные линейные и фазные токи;
6) определить рациональные сечения проводов обмоток высшего и низшего напряжений, приняв допустимую по нагреву плотность тока в проводах  ;
;
7) рассчитать и построить график  при коэффициенте мощности нагрузки
при коэффициенте мощности нагрузки  ;
;
8) начертить принципиальную электрическую схему трансформатора, изменив схему соединения его вторичных обмоток, и определить, как это повлияет на линейные и фазные напряжения и коэффициенты трансформации;
9) то же выполнить, изменив схему соединения первичных обмоток.
Исходные данные:
Номинальная полная мощность трансформатора -  .
.
Номинальное первичное линейное напряжение -  .
.
Номинальное вторичное линейное напряжение -  .
.
Мощность потерь в магнитопроводе -  .
.
Мощность электрических потерь в обмотках при номинальной нагрузке -  .
.
Ток холостого хода - .
Напряжение короткого замыкания в процентах от номинального -  .
.
Схема соединения обмоток – Δ / γ.
Решение.
1. Строим схему магнитной цепи трансформатора (рис 2.4):
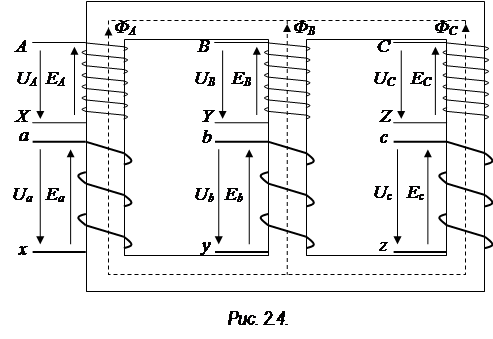 Тонкими линиями с большим количеством витков показаны обмотки высшего напряжения, а толстыми линиями с малым числом витков – обмотки низшего напряжения. Буквами ( A – X и a – x ; B – Y и b – y ; С – Z и c - z ) обозначены одноименные зажимы фаз первичной и вторичной обмоток. На эскизе показаны условно-положительные направления магнитных потоков (ФА, ФВ, ФС) в стержнях магнитопровода, а так же фазных напряжений ( UA и Ua ; UB и Ub ; UC и Uc ) и фазных э.д.с.( EA и Ea ; EB и Eb ; EC и Ec ) соответственно обмоток высшего и низшего напряжений.
Тонкими линиями с большим количеством витков показаны обмотки высшего напряжения, а толстыми линиями с малым числом витков – обмотки низшего напряжения. Буквами ( A – X и a – x ; B – Y и b – y ; С – Z и c - z ) обозначены одноименные зажимы фаз первичной и вторичной обмоток. На эскизе показаны условно-положительные направления магнитных потоков (ФА, ФВ, ФС) в стержнях магнитопровода, а так же фазных напряжений ( UA и Ua ; UB и Ub ; UC и Uc ) и фазных э.д.с.( EA и Ea ; EB и Eb ; EC и Ec ) соответственно обмоток высшего и низшего напряжений.
2. Строим принципиальные схемы трехфазной электрической цепи трансформато
 |
ра в трехлинейном (рис. 2.5 а) и однолинейном (рис. 2.5 б) исполнениях.
На схеме указаны условно-положительные направления линейных ( они же фазные) напряжений первичных обмоток (  ); линейных (
); линейных (  ) и фазных (
) и фазных (  ) напряжений вторичных обмоток; линейных (
) напряжений вторичных обмоток; линейных (  ) и фазных (
) и фазных (  ) токов первичных обмоток; линейных (они же фазные) токов вторичных обмоток (
) токов первичных обмоток; линейных (они же фазные) токов вторичных обмоток (  ). Из схемы видно, что в первичной обмотке направления фазных токов и напряжений совпадают, т.е. эти обмотки трансформатора работают в режиме потребления электроэнергии. Во вторичных обмотках фазные токи направлены навстречу фазным напряжениям, т.е. вторичные обмотки трансформатора работают в генераторном режиме и являются источниками электроэнергии для нагрузки.
). Из схемы видно, что в первичной обмотке направления фазных токов и напряжений совпадают, т.е. эти обмотки трансформатора работают в режиме потребления электроэнергии. Во вторичных обмотках фазные токи направлены навстречу фазным напряжениям, т.е. вторичные обмотки трансформатора работают в генераторном режиме и являются источниками электроэнергии для нагрузки.
3. Определяем значения номинальных фазных напряжений первичных и вторичных обмоток трансформатора при заданной схеме соединения (рис. 2.5 а). Для первичных обмоток соединенных «в треугольник», фазные напряжения равны линейному напряжению сети, т.е.  Для вторичных обмоток соединенных «в звезду»:
Для вторичных обмоток соединенных «в звезду»: 
4. Определяем коэффициенты трансформации.
Фазный коэффициент: 
Линейный коэффициент: 
5. Определяем номинальные линейные и фазные токи цепи (рис.2.5 а).
Если пренебречь потерями в трансформаторе, потребляемую трансформатором из сети в режиме номинальной нагрузки полную мощность  и отдаваемую им в нагрузку полную мощность
и отдаваемую им в нагрузку полную мощность  можно считать равными паспортной мощности
можно считать равными паспортной мощности  .
.
Тогда линейные токи


Для первичных обмоток , соединенных треугольником, фазный ток

Для вторичных обмоток, соединенных звездой, фазный ток

6. Определяем рациональные сечения проводов обмоток высшего и низшего напряжений:

7.
 |
Рассчитываем по формуле (2.14) и строим график зависимости к.п.д. трансформатора от коэффициента нагрузки
 при коэффициенте мощности нагрузки
при коэффициенте мощности нагрузки  (см. рис. 2.6).
(см. рис. 2.6).
Из графика (рис.2.6) видно, что к.п.д. трансформатора резко снижается при приближении к режиму холостого хода. Отсюда следует, что мощность трансформатора следует выбирать так, чтобы избегать работы его с недогрузкой.
8. Строим принципиальную электрическую схему трансформатора, изменив схему соединения его вторичных обмоток со звезды на треугольник (рис.2.7) и определяем, как это повлияет на линейные и фазные напряжения и коэффициенты трансформации.
Поскольку соединение фаз первичных обмоток не изменилось, то первичные линейные и фазные напряжения останутся прежними (п.3). Фазный коэффициент трансформации определяется числом витков и поэтому, также не изменится, т.е. 

Отсюда вторичное фазное напряжение: 
Для схемы соединения треугольник линейное напряжение равно фазному, поэтому для вторичной цепи трансформатора 
Линейный коэффициент трансформации при соединении обмоток по схеме Δ /Δ:
 .
.
Таким образом, для рассматриваемой схемы соединения обмоток трансформатора (Δ /Δ) фазный и линейный коэффициенты трансформации равны, т.е. 
9.  Строим принципиальную электрическую схему трансформатора, изменив схему соединения его вторичных обмоток, (первичные имеют исходное соединение, т.е. Y ) с треугольника на звезду (рис.2.8) и определяем, как это повлияет на линейные и фазные напряжения и коэффициенты трансформации.
Строим принципиальную электрическую схему трансформатора, изменив схему соединения его вторичных обмоток, (первичные имеют исходное соединение, т.е. Y ) с треугольника на звезду (рис.2.8) и определяем, как это повлияет на линейные и фазные напряжения и коэффициенты трансформации.
По условию, заданное первичное напряжение сети составляет  . Фазное напряжение на первичных обмотках трансформатора при схеме соединения Y в
. Фазное напряжение на первичных обмотках трансформатора при схеме соединения Y в  раз меньше линейного, т.е.
раз меньше линейного, т.е.

Фазный коэффициент трансформации не изменяется 
Отсюда вторичное фазное напряжение 
Тогда вторичное линейное напряжение при рассматриваемой схеме соединения обмоток (рис. 2.8) 
Линейный коэффициент трансформации при рассматриваемой схеме соединения обмоток ( Y / Y )  , т.е. фазный и линейный коэффициенты равны.
, т.е. фазный и линейный коэффициенты равны.
Анализируя полученные результаты расчетов, заключаем, что при изменении схем соединения фазных обмоток трансформатора можно получить различные значения напряжений, что дает некоторую возможность их выбора.
Машины постоянного тока
Электрическая машина постоянного тока состоит из следующих основных частей: неподвижного статора с расположенным на нем индуктором, подвижного якоря с размещенной на нем обмоткойи коллекторно-щеточного механизма (КЩМ).
Индуктор предназначен для создания магнитного поля и выполнен в виде стальных полюсных наконечников, на которых размещена обмотка возбуждения. Полюсные наконечники могут быть выполнены также из постоянных магнитов. Якорь с обмоткой закреплен на валу, который установлен в корпусе на подшипниках с возможностью вращения. КЩМ состоит из расположенных по окружности пластин, к которым подключены выводы соединенных последовательно секций якорной обмотки. К пластинам прижимаются щетки. Присоединенные к щеткам проводники являются выводами якорной обмотки. За счет скользящего контакта между пластинами и щетками обеспечивается гальваническая связь обмотки якоря с внешней электрической цепью.
При вращении якоря в магнитном поле в его обмотке наводится э.д.с.
 , (3.1)
, (3.1)
где  - электрическая постоянная машины, зависящая от ее конструктивных параметров;
- электрическая постоянная машины, зависящая от ее конструктивных параметров;  - частота вращения якоря;
- частота вращения якоря;  - магнитный поток.
- магнитный поток.
При работе машины в генераторном режиме под действием э.д.с. якоря во внешней цепи протекает ток (его направление совпадает с э.д.с.). Благодаря действию КЩМ, направление э.д.с. на зажимах якорной обмотки остается постоянным.
Магнитный поток создается обмоткой возбуждения и, следовательно, пропорционален току в этой обмотке  . Его величина зависит как от сопротивления обмотки
. Его величина зависит как от сопротивления обмотки  , так и от схемы ее подключения.
, так и от схемы ее подключения.
В зависимости от способа подключения обмотки возбуждения по отношению к якорной обмотке различают машины с параллельным, последовательным, смешанным и независимым возбуждением. У машин с независимым возбуждением обмотка возбуждения получает питание от независимого источника постоянного тока.
Схема подключения обмоток генератора постоянного тока с параллельным возбуждением показана на рис. 3.1. Для регулирования тока возбуждения, а следовательно, и магнитного потока машины, в цепь обмотки возбуждения ОВШ включен регулировочный реостат сопротивлением  . Ток якоря в генераторе параллельного возбуждения (рис. 3.1) делится на две составляющие: ток нагрузки
. Ток якоря в генераторе параллельного возбуждения (рис. 3.1) делится на две составляющие: ток нагрузки  и ток возбуждения . В соответствии с первым законом Кирхгофа:
и ток возбуждения . В соответствии с первым законом Кирхгофа:

 (3.2)
(3.2)
При запуске генератора в первый момент ток возбуждения равен нулю и в якорной обмотке наводится э.д.с.  , обусловленная остаточным магнитным потоком
, обусловленная остаточным магнитным потоком  . Под действием этой э.д.с. в обмотке возбуждения появляется ток, что приводит к дальнейшему росту магнитного потока и э.д.с. Таким образом в процессе запуска устанавливаются номинальные значения тока возбуждения, магнитного потока и э.д.с. якоря. Нормальный запуск генератора возможен только при таком подключении обмотки возбуждения, когда создаваемый ею поток совпадает по направлению с остаточным потоком .
. Под действием этой э.д.с. в обмотке возбуждения появляется ток, что приводит к дальнейшему росту магнитного потока и э.д.с. Таким образом в процессе запуска устанавливаются номинальные значения тока возбуждения, магнитного потока и э.д.с. якоря. Нормальный запуск генератора возможен только при таком подключении обмотки возбуждения, когда создаваемый ею поток совпадает по направлению с остаточным потоком .
Уравнение, описывающее внешнюю характеристику генератора постоянного тока с параллельным возбуждением (зависимость напряжения на его зажимах от тока нагрузки при постоянном сопротивлении цепи возбуждения и номинальной скорости вращения якоря) в соответствии со вторым законом Кирхгофа
 (3.3)
(3.3)
Уменьшение напряжения на зажимах генератора с параллельным возбуждением с увеличением тока нагрузки обусловлено возрастанием падения напряжения  на обмотке якоря. При этом вследствие реакции якоря происходит уменьшение результирующего магнитного потока, а следовательно, и э.д.с. якоря. В свою очередь это приводит к некоторому уменьшению тока возбуждения, магнитного потока, э.д.с. якоря и дальнейшему уменьшению напряжения на зажимах генератора.
на обмотке якоря. При этом вследствие реакции якоря происходит уменьшение результирующего магнитного потока, а следовательно, и э.д.с. якоря. В свою очередь это приводит к некоторому уменьшению тока возбуждения, магнитного потока, э.д.с. якоря и дальнейшему уменьшению напряжения на зажимах генератора.
 У машин постоянного тока с независимым возбуждением обмотка возбуждения ОВ, питается от отдельного источника GB (рис.3.2). Это может быть другой генератор постоянного тока, аккумуляторная батарея и т.д. Для данной схемы ток якоря
У машин постоянного тока с независимым возбуждением обмотка возбуждения ОВ, питается от отдельного источника GB (рис.3.2). Это может быть другой генератор постоянного тока, аккумуляторная батарея и т.д. Для данной схемы ток якоря  равен току нагрузки , а ток возбуждения определяется только сопротивлением регулировочного реостата
равен току нагрузки , а ток возбуждения определяется только сопротивлением регулировочного реостата  и напряжением
и напряжением  источника GB. У машин с независимым и параллельным возбуждением сопротивление обмотки возбуждения относительно велико, поэтому ток возбуждения мал (обычно 1-3% от номинального значения тока якоря). Внешняя характеристика генератора с независимым возбуждением аналогична характеристике генератора с параллельным возбуждением, т.к. описывается уравнением (3.3). Но в данном случае ток нагрузки не оказывает влияния на
источника GB. У машин с независимым и параллельным возбуждением сопротивление обмотки возбуждения относительно велико, поэтому ток возбуждения мал (обычно 1-3% от номинального значения тока якоря). Внешняя характеристика генератора с независимым возбуждением аналогична характеристике генератора с параллельным возбуждением, т.к. описывается уравнением (3.3). Но в данном случае ток нагрузки не оказывает влияния на  , поэтому характеристика имеет меньший наклон.
, поэтому характеристика имеет меньший наклон.
 У генераторов с последовательным возбуждением обмотка возбуждения ОВС включается последовательно с обмоткой якоря (рис.3.3), поэтому ток возбуждения равен току в цепи якоря, а следовательно и в цепи нагрузки, т. е.
У генераторов с последовательным возбуждением обмотка возбуждения ОВС включается последовательно с обмоткой якоря (рис.3.3), поэтому ток возбуждения равен току в цепи якоря, а следовательно и в цепи нагрузки, т. е.  (3.4)
(3.4)
Для того, чтобы обмотка возбуждения не ограничивала ток в цепи якоря и падение напряжения на ней было невелико, сопротивление обмотки должно быть относительно малым (обмотку выполняют с небольшим числом витков проводом большого сечения).
Уравнение внешней характеристики этого генератора имеет вид:
 (3.5)
(3.5)
Однако в соответствии с (3.1) зависит от  , а следовательно – от тока нагрузки. Поэтому по мере роста тока нагрузки выходное напряжение также возрастает. Когда наступает насыщение магнитопровода, рост
, а следовательно – от тока нагрузки. Поэтому по мере роста тока нагрузки выходное напряжение также возрастает. Когда наступает насыщение магнитопровода, рост  и прекращается, а выходное напряжение начинает снижаться за счет падения напряжения на сопротивлении
и прекращается, а выходное напряжение начинает снижаться за счет падения напряжения на сопротивлении  . Таким образом внешняя характеристика является возрастающей на начальном участке, а на последующем участке – падающей.
. Таким образом внешняя характеристика является возрастающей на начальном участке, а на последующем участке – падающей.
Поскольку в генераторе с последовательным возбуждением выходное напряжение сильно зависит от нагрузки, а при холостом ходе близко к нулю, то такие генераторы непригодны для питания большинства электрических потребителей и практически не применяются.
 Генераторы постоянного тока со смешанным возбуждением (рис. 3.4) имеют две обмотки возбуждения – основную (ОВШ), включаемую параллельно обмотке якоря и вспомогательную (ОВС), включаемую в цепь якоря и нагрузки. При этом магнитный поток генератора
Генераторы постоянного тока со смешанным возбуждением (рис. 3.4) имеют две обмотки возбуждения – основную (ОВШ), включаемую параллельно обмотке якоря и вспомогательную (ОВС), включаемую в цепь якоря и нагрузки. При этом магнитный поток генератора
 ,
,
где  - поток, создаваемый параллельной обмоткой возбуждения;
- поток, создаваемый параллельной обмоткой возбуждения;  - поток, создаваемый последовательной обмоткой. Основной вклад в общий поток
- поток, создаваемый последовательной обмоткой. Основной вклад в общий поток  вносит обмотка ОВШ, т.е. составляющая
вносит обмотка ОВШ, т.е. составляющая  , поэтому внешняя характеристика генератора со смешанным возбуждением близка к характеристике генератора с параллельным возбуждением. С помощью обмотки ОВС (за счет составляющей потока
, поэтому внешняя характеристика генератора со смешанным возбуждением близка к характеристике генератора с параллельным возбуждением. С помощью обмотки ОВС (за счет составляющей потока  ) можно корректировать желаемым образом наклон характеристики.
) можно корректировать желаемым образом наклон характеристики.
Согласное включение этих обмоток при соответствующем подборе позволяет получать на выходе генератора практически постоянное напряжение независимо от нагрузки.
Если обмотки включить встречно, то наклон внешней характеристики генератора наоборот возрастет. Такое включение обмоток применяют в сварочных генераторах и других специальных машинах, где требуется ограничить ток короткого замыкания.
Двигатели постоянного тока (ДПТ) в конструктивном отношении не отличаются от генераторов, так как электрические машины постоянного тока обратимы (могут работать как в генераторном, так и в двигательном режимах). Соответственно, для двигателей применяют аналогичные схемы подключения: с параллельным, независимым, последовательным и смешанным возбуждением. Характеристики двигателей зависят от схемы подключения.
При работе в двигательном режиме ток по обмотке якоря протекает под действием приложенного напряжения от внешнего источника (э.д.с. направлена противоположно току). Ее значение определяется согласно (3.1). В результате взаимодействия тока якоря с магнитным полем индуктора на якорь действует электромагнитный момент
 , (3.6)
, (3.6)
где  - постоянная, зависящая от конструктивных параметров машины.
- постоянная, зависящая от конструктивных параметров машины.
При этом якорь вращается в направлении действия электромагнитного момента.
При пуске электродвигателей постоянного тока путем прямого включения в сеть пусковой ток многократно превышает номинальный, что может привести к выходу якорной обмотки из строя вследствие нарушения ее изоляции. Поэтому пуск двигателей постоянного тока производится с помощью пусковых реостатов, ограничивающих пусковой ток. По мере разгона двигателя пусковой реостат  выводится из действия.
выводится из действия.
 |
Для якорной цепи электродвигателя постоянного тока с параллельным возбуждением (рис.3.5 а) уравнение электрического равновесия при
 в соответствии со вторым законом Кирхгофа
в соответствии со вторым законом Кирхгофа
 (3.7)
(3.7)
Подставив (3.1) в (3.7), получим уравнение электромеханической (скоростной) характеристики электродвигателя
 (3.8)
(3.8)
При отсутствии нагрузки (  ) из (3.6) получаем
) из (3.6) получаем  и в соответствии с (3.8) частота вращения идеального холостого хода электродвигателя
и в соответствии с (3.8) частота вращения идеального холостого хода электродвигателя  .
.
 При параллельном возбуждении двигатель обычно включают на номинальное напряжение (напряжение на обеих обмотках постоянно и равно номинальному). В этом случае ток возбуждения не зависит от тока якоря и имеет постоянное значение. Поэтому, пренебрегая размагничивающим действием реакции якоря, можно считать, что магнитный поток двигателя не зависит от нагрузки (
При параллельном возбуждении двигатель обычно включают на номинальное напряжение (напряжение на обеих обмотках постоянно и равно номинальному). В этом случае ток возбуждения не зависит от тока якоря и имеет постоянное значение. Поэтому, пренебрегая размагничивающим действием реакции якоря, можно считать, что магнитный поток двигателя не зависит от нагрузки (  ) и в соответствии с (3.6), (3.8) моментная
) и в соответствии с (3.6), (3.8) моментная  и скоростная
и скоростная  характеристики двигателя линейны (рис.3.5 б).
характеристики двигателя линейны (рис.3.5 б).
В двигателе независимого возбуждения (рис.3.6) обмотка якоря и обмотка возбуждения подключены к различным источникам, что позволяет изменять напряжение на обмотках независимо. Такие двигатели применяют в регулируемых приводах, где питание обмоток осуществляется от генераторов или полупроводниковых преобразователей. При номинальных напряжениях на обмотках характеристики двигателя такие же, как при параллельном возбуждении (см. рис.3.5 б).
Изменение напряжения на обмотках позволяет регулировать частоту вращения двигателя. При уменьшении напряжения на обмотке якоря частота вращения снижается, а при уменьшении напряжения на обмотке возбуждения – увеличивается относительно номинального значения.
Для электродвигателя с последовательным возбуждением (рис.3.7 а)
 (3.9)
(3.9)
При этом уравнение (3.8) приводится к виду  (3.10)
(3.10)
 При последовательном возбуждении ток возбуждения равен току якоря (
При последовательном возбуждении ток возбуждения равен току якоря (  ) и магнитный поток является функцией тока якоря, поэтому в соответствии с (3.6), (3.10) моментная и скоростная характеристики двигателя нелинейны (рис.3.7 б).
) и магнитный поток является функцией тока якоря, поэтому в соответствии с (3.6), (3.10) моментная и скоростная характеристики двигателя нелинейны (рис.3.7 б).
При снижении нагрузки частота вращения неограниченно возрастает, поэтому эксплуатировать двигатель в режиме холостого хода и близком к нему нельзя. Данный двигатель в основном используется для привода различных транспортных устройств.
Электродвигатель постоянного тока со смешанным возбуждением (рис.3.8) имеет параллельную и последовательную обмотки возбуждения. При этом магнитный поток параллельной обмотки  при неизменном значении напряжения
при неизменном значении напряжения  , а магнитный поток последовательной обмотки зависит от тока якоря, т.е. от нагрузки.
, а магнитный поток последовательной обмотки зависит от тока якоря, т.е. от нагрузки.
 Поскольку поток машины
Поскольку поток машины  , то моментная и скоростная характеристики занимают среднее положение между характеристиками двигателей с параллельным и последовательным возбуждением (рис. 3.5 б, 3.7 б). При этом скоростная характеристика более “мягкая” (имеет больший наклон) чем у двигателя с параллельным возбуждением, а частота вращения холостого хода имеет конечное значение.
, то моментная и скоростная характеристики занимают среднее положение между характеристиками двигателей с параллельным и последовательным возбуждением (рис. 3.5 б, 3.7 б). При этом скоростная характеристика более “мягкая” (имеет больший наклон) чем у двигателя с параллельным возбуждением, а частота вращения холостого хода имеет конечное значение.
Подставляя  из (3.6) в уравнения скоростных характеристик (3.8), (3.10), получим уравнения механических характеристик
из (3.6) в уравнения скоростных характеристик (3.8), (3.10), получим уравнения механических характеристик  ДПТ. Для двигателей с параллельным и независимым возбуждением
ДПТ. Для двигателей с параллельным и независимым возбуждением
 (3.11)
(3.11)
Для двигателей с последовательным и смешанным возбуждением
 (3.12)
(3.12)
Пренебрегая влиянием реакции якоря в процессе изменения нагрузки на валу, электромагнитный момент можно считать пропорциональным току якоря. Поэтому механические характеристики ДПТ имеют такой же вид, как и соответствующие скоростные характеристики: для двигателей с параллельным и независимым возбуждением при  они линейны и имеют небольшой наклон, для двигателя с последовательным возбуждением они близки к гиперболическим.
они линейны и имеют небольшой наклон, для двигателя с последовательным возбуждением они близки к гиперболическим.
Рабочие характеристики электродвигателей постоянного тока представляют собой зависимости частоты вращения  , момента
, момента  , тока якоря
, тока якоря  и к.п.д.
и к.п.д.  от полезной мощности на валу
от полезной мощности на валу  , т.е.
, т.е.  при неизменном значении подводимого напряжения питания.
при неизменном значении подводимого напряжения питания.
Мощность на валу двигателя (в кВт)
 (3.13)
(3.13)
У двигателей с параллельным и независимым возбуждением с ростом момента на валу частота вращения снижается незначительно, поэтому зависимости  имеют такой же вид, как и зависимости
имеют такой же вид, как и зависимости  . Для двигателя с последовательным возбуждением зависимость
. Для двигателя с последовательным возбуждением зависимость  близка к параболической.
близка к параболической.
Соответственно, моментные характеристики  строятся по уравнению
строятся по уравнению
 . (3.14)
. (3.14)
Они имеют возрастающий характер и для двигателей с параллельным и независимым возбуждением близки к линейным.
К.п.д. электродвигателя определяется отношением полезной мощности на валу  к мощности
к мощности  , потребляемой из сети
, потребляемой из сети
 (3.16)
(3.16)
где  - электрические потери мощности в цепи якоря;
- электрические потери мощности в цепи якоря;  - электрические потери мощности в цепи возбуждения;
- электрические потери мощности в цепи возбуждения;  - механические потери;
- механические потери;  - добавочные потери;
- добавочные потери;  - потери мощности на гистерезис и вихревые токи в магнитопроводе.
- потери мощности на гистерезис и вихревые токи в магнитопроводе.
К.п.д. электродвигателей с увеличением мощности на валу возрастает и достигает своего максимального значения, когда переменные потери мощности в двигателе оказываются равными постоянным потерям, т.е.  . Параметры двигателя рассчитывают так, чтобы максимальный к.п.д. имел место при нагрузке близкой к номинальной.
. Параметры двигателя рассчитывают так, чтобы максимальный к.п.д. имел место при нагрузке близкой к номинальной.
Рабочие характеристики ДПТ со смешанным возбуждением занимают среднее положение между рабочими характеристиками двигателей с параллельным и последовательным возбуждением.
Частоту вращения ДПТ можно регулировать следующими способами: включением добавочного сопротивления в цепь якоря, изменением напряжения на обмотках якоря и возбуждения. При увеличении сопротивления цепи якоря наклон механической характеристики возрастает, что обеспечивает уменьшение частоты вращения при неизменном моменте. Изменение напряжения на обмотке якоря позволяет регулировать частоту вращения от нуля до номинального значения, а изменение напряжения на обмотке возбуждения – вверх от номинального значения.
Краткие теоретические сведения, приведенные выше, позволяют решать практические задачи по расчету ДПТ. Некоторые примеры решения приведены ниже.
Пример 2.1.
Задания на расчет:
Для ДПТ с параллельным возбуждением по заданным значениям некоторых паспортных данных требуется:
1) составить и начертить принципиальную электрическую схему включения, предусмотрев в ней возможности ограничения пускового тока (пусковой реостат) и регулирования скорости вращения (регулировочный реостат);
2) по заданным значениям параметров двигателя определить его недостающие паспортные данные;
3) рассчитать и построить естественную (при номинальных напряжениях на обмотках и  ) механическую характеристику
) механическую характеристику  двигателя;
двигателя;
4) определить сопротивление пускового реостата  для ограничения пускового тока значением
для ограничения пускового тока значением  и пусковой момент
и пусковой момент  , а также построить искусственную механическую характеристику двигателя с пусковым реостатом;
, а также построить искусственную механическую характеристику двигателя с пусковым реостатом;
5) рассчитать и построить график зависимости к.п.д. двигателя от коэффициента нагрузки  .
.
Исходные данные:
Номинальное напряжение сети -  .
.
Номинальный ток двигателя -  .
.
Номинальный ток возбуждения -  .
.
Номинальная частота вращения -  .
.
Примечание . Принять, что номинальные потери мощности в цепи возбуждения составляют 20%, номинальные потери мощности в цепи якоря 50% от суммарных номинальных потерь мощности в двигателе.
Решение.
 |
1. Строим схему подключенияДПТ с параллельным возбуждением (рис. 3.9)
2. По заданным значениям параметров двигателя, определяем:
· Номинальный ток в цепи якоря, в соответствии с первым законом Кирхгофа

· Номинальную мощность, потребляемую ДПТ из сети

· Номинальное сопротивление цепи возбуждения согласно закону Ома
 .
.
· Номинальные потери мощности в цепи возбуждения

· Суммарные потери мощности двигателя в режиме номинальной нагрузки
Исходя из условия  , находим:
, находим:

· Номинальную мощность, развиваемую двигателем на валу

· К.п.д. двигателя в номинальном режиме работы
 ,
,
или  .
.
· Номинальный момент на валу ДПТ

· Номинальные потери в цепи якоря:
Согласно условию -  .
.
Тогда сопротивление якоря в соответствии с  будет
будет

· Номинальную ЭДС якоря:

· Номинальную мощность, потребляемую ДПТ из сети:

3. Рассчитываем и строим естественную механическую характеристику двигателя.
Поскольку при параллельном возбуждении зависимость n ( M ) - прямая линия, её можно построить по двум точкам: точке, соответствующей идеальному холостому ходу, с координатами nx ; M х =0 и точке номинального режима с координатами n н , M н . Определяем частоту вращения холостого хода

По данным точкам строим характеристику n ( M ) двигателя (см. рис. 3.10,а).
4. Строим искусственную механическую характеристику двигателя с пусковым реостатом.
Эта характеристика, как и естественная, является линейной, а следовательно строится по двум точкам: точке идеального холостого хода с координатами ( n х ; М=0) и точке, соответствующей режиму пуска с координатами ( n п =0; Мп)
Пусковой вращающий момент  . Поскольку
. Поскольку  , то
, то

Полученная характеристика приведена на рис.3.10 б.
Определяем сопротивление пускового реостата R п .
В момент пуска n =0, следовательно E я =0, а 
Тогда 


Рис.3.10.
5. Рассчитываем и строим график  (β). При параллельном возбуждении можно считать n – const при изменении момента в допустимых пределах, а момент линейно зависящим от мощности на валу. Поскольку ток якоря пропорционален моменту, а потери в цепи якоря пропорциональны квадрату тока, то
(β). При параллельном возбуждении можно считать n – const при изменении момента в допустимых пределах, а момент линейно зависящим от мощности на валу. Поскольку ток якоря пропорционален моменту, а потери в цепи якоря пропорциональны квадрату тока, то  . Тогда согласно (3.16)
. Тогда согласно (3.16)

Результаты расчетов сводим в таблицу 3.1 и строим график  (β)(см. рис 3.11).
(β)(см. рис 3.11).
Таблица 3.1.

| 0.2 | 0.4 | 0.6 | 0.8 | 1 | 1.2 | 1.4 | 1.6 | 1.8 | 2 |

| 0.69 | 0.8 | 0.83 | 0.847 | 0.85 | 0.848 | 0.843 | 0.836 | 0.828 | 0.82 |

Рис.3.11.
Машины переменного тока.
Машины переменного тока предназначены для преобразования механической энергии в электрическую энергию переменного тока (генераторы) или для преобразования электрической энергии переменного тока в механическую (двигатели). Они подразделяются на синхронные и асинхронные. Наиболее широко применяются в промышленности для привода различных механизмов трехфазные асинхронные двигатели с короткозамкнутым ротором. Они отличаются простотой конструкции и как следствие, малыми габаритами, массой и высокой надежностью. Данные двигатели используются в подавляющем большинстве нерегулируемых приводов, а в последнее время и в регулируемых приводах в сочетании с преобразователями частоты.
Для производства электрической энергии чаще всего используют синхронные генераторы. Более ограниченное применение имеют трехфазные асинхронные двигатели с фазным ротором, синхронные двигатели, а также однофазные и двухфазные асинхронные двигатели.
Трехфазный асинхронный электродвигатель с короткозамкнутым ротором имеет трехфазную обмотку, выполненную медным проводом и уложенную в пазах на статоре, а также - короткозамкнутую обмотку типа «беличья клетка» на роторе.
При подключении обмотки статора к сети трехфазного напряжения она создает магнитный поток, вращающийся в пространстве с синхронной частотой
 (4.1)
(4.1)
где  - частота подводимого к двигателю напряжения,
- частота подводимого к двигателю напряжения,  - число пар полюсов.
- число пар полюсов.
Вращающееся магнитное поле пересекает проводники обмотки неподвижного ротора. Вследствие этого в обмотке ротора индуцируется э.д.с.  , под действием которой по обмотке ротора протекает пусковой ток
, под действием которой по обмотке ротора протекает пусковой ток  . В результате взаимодействия вращающегося магнитного поля статора с проводниками обмотки ротора, по которым протекает ток, на ротор действует пусковой вращающий момент
. В результате взаимодействия вращающегося магнитного поля статора с проводниками обмотки ротора, по которым протекает ток, на ротор действует пусковой вращающий момент  , направленный в сторону вращения магнитного поля. Под действием пускового момента ротор начинает вращаться с частотой
, направленный в сторону вращения магнитного поля. Под действием пускового момента ротор начинает вращаться с частотой
 (4.2)
(4.2)
где  - величина, характеризующая разность частот вращения магнитного поля и ротора, называемая скольжением.
- величина, характеризующая разность частот вращения магнитного поля и ротора, называемая скольжением.
В момент запуска двигателя  , а частота э.д.с. и тока в обмотке ротора равна частоте напряжения питающей сети
, а частота э.д.с. и тока в обмотке ротора равна частоте напряжения питающей сети  . По мере разгона ротора скольжение, а также частота э.д.с. и тока в обмотке ротора
. По мере разгона ротора скольжение, а также частота э.д.с. и тока в обмотке ротора  снижаются. При номинальной нагрузке на валу номинальная величина скольжения составляет 0,02 - 0,06 (в зависимости от типа двигателя), ротор вращается с частотой
снижаются. При номинальной нагрузке на валу номинальная величина скольжения составляет 0,02 - 0,06 (в зависимости от типа двигателя), ротор вращается с частотой  и двигатель развивает номинальную мощность
и двигатель развивает номинальную мощность  . Вращающий момент при номинальной нагрузке
. Вращающий момент при номинальной нагрузке
 (4.3)
(4.3)
Механическая характеристика  или
или  асинхронного двигателя выражается громоздкой и неудобной для анализа функцией. На практике для построения механической характеристики обычно используют приближенную формулу
асинхронного двигателя выражается громоздкой и неудобной для анализа функцией. На практике для построения механической характеристики обычно используют приближенную формулу
 (4.4)
(4.4)
где  - критическое значение скольжения, соответствующее максимальному (критическому) значению момента
- критическое значение скольжения, соответствующее максимальному (критическому) значению момента  . Отношение
. Отношение

 (4.5)
(4.5)
называется кратностью максимального момента. Она характеризует перегрузочную способность асинхронного двигателя.
Примерный вид механической характеристики показан на рис. 4.1. Участок ОН, на котором зависимость (4.4) практически линейна, является рабочим. На этом участке механической характеристики асинхронный двигатель может работать длительно, не перегреваясь выше допустимой температуры.
Участок НК соответствует механической перегрузке двигателя. На данном участке двигатель может работать кратковременно, после чего нагрузка должна быть снижена.
Участок ОК характеристики – участок статически устойчивой работы двигателя, при которой он может автоматически компенсировать увеличение нагрузки на валу. Т.е. при возрастании по какой-либо причине момента сопротивления  последует переходный процесс, в ходе которого частота вращения ротора уменьшится, скольжение увеличится, а вращающий момент
последует переходный процесс, в ходе которого частота вращения ротора уменьшится, скольжение увеличится, а вращающий момент  возрастет. Вследствие этого двигатель выйдет на новый установившийся режим, характеризующийся более низкой частотой вращения
возрастет. Вследствие этого двигатель выйдет на новый установившийся режим, характеризующийся более низкой частотой вращения  <
<  и равенством моментов
и равенством моментов  .
.
Участок КП соответствует неустойчивой работе двигателя. По данному участку изменяется момент и частота вращения при пуске. Если по какой-либо причине  станет больше
станет больше  , двигатель перейдет в так называемый режим опрокидывания. При этом момент и частота вращения также изменяются по участку КП характеристики, но в сторону уменьшения, вплоть до полной остановки двигателя.
, двигатель перейдет в так называемый режим опрокидывания. При этом момент и частота вращения также изменяются по участку КП характеристики, но в сторону уменьшения, вплоть до полной остановки двигателя.
Точка П характеристики, имеющая координаты (  ), соответствует режиму пуска двигателя. Величина
), соответствует режиму пуска двигателя. Величина  , называемая кратностью пускового момента, характеризует его пусковую способность.
, называемая кратностью пускового момента, характеризует его пусковую способность.
Точка 0 характеристики соответствует режиму холостого хода, при котором момент сопротивления очень мал (определяется только трением в опорах). Поэтому скольжение составляет тысячные доли и частота вращения ротора близка к синхронной.
При расчете приводов иногда удобнее использовать механическую характеристику в виде зависимости  , которую несложно получить из выражения (4.4), с учетом (4.2), как это сделано в нижеприведенном примере.
, которую несложно получить из выражения (4.4), с учетом (4.2), как это сделано в нижеприведенном примере.
Синхронные машины по конструкции близки к асинхронным. В частности статор имеет аналогичную конструкцию. В его пазах располагается трехфазная обмотка, которая может быть соединена по схеме «звезда» или «треугольник». Ротор может быть выполнен с явно выраженными полюсами, либо с неявно выраженными полюсами. На роторе размещена обмотка возбуждения, получающая питание через контактные кольца и щетки от источника постоянного тока. В машинах небольшой мощности вместо обмотки возбуждения может использоваться постоянный магнит.
При работе машины в качестве генератора ротор приводится во вращение от внешнего двигателя. Он создает вращающееся магнитное поле, которое пересекает проводники обмотки статора и наводит в ней синусоидальную э.д.с. Действующее значение э.д.с.
 , (4.6)
, (4.6)
где  - обмоточный коэффициент,
- обмоточный коэффициент,  - число витков одной фазы обмотки якоря,
- число витков одной фазы обмотки якоря,  - амплитуда магнитного потока одной пары полюсов индуктора.
- амплитуда магнитного потока одной пары полюсов индуктора.
Частота э.д.с. зависит от числа пар полюсов  и частоты вращения
и частоты вращения  ротора
ротора
 (4.7)
(4.7)
Нагрузка подключается к зажимам якорной обмотки статора, поэтому ток нагрузки равен току данной обмотки  . Внешней характеристикой синхронного генератора (рис.4.2) является зависимость напряжения на зажимах от тока нагрузки
. Внешней характеристикой синхронного генератора (рис.4.2) является зависимость напряжения на зажимах от тока нагрузки  при постоянных значениях
при постоянных значениях  , n и тока в обмотке возбуждения
, n и тока в обмотке возбуждения  .
.
 Она строится по уравнению электрического равновесия согласно второму закону Кирхгофа:
Она строится по уравнению электрического равновесия согласно второму закону Кирхгофа:
 , (4.8)
, (4.8)
где  - э.д.с., индуцируемая в якорной обмотке статора;
- э.д.с., индуцируемая в якорной обмотке статора;  - соответственно активное и реактивное сопротивления обмотки.
- соответственно активное и реактивное сопротивления обмотки.
При активно-индуктивном характере нагрузки (  ) напряжение на зажимах генератора снижается с увеличением нагрузки за счет падения напряжения на обмотке якоря и влияния его реакции. Это снижение можно компенсировать за счет увеличения тока возбуждения машины. Зависимость
) напряжение на зажимах генератора снижается с увеличением нагрузки за счет падения напряжения на обмотке якоря и влияния его реакции. Это снижение можно компенсировать за счет увеличения тока возбуждения машины. Зависимость  , обеспечивающая
, обеспечивающая  при
при  и
и  , называется регулировочной или
, называется регулировочной или  - образной характеристикой машины (рис.4.3).
- образной характеристикой машины (рис.4.3).
 Синхронные машины небольшой мощности выполняют как с неподвижным, так и с вращающимся якорем. Синхронную машину с вращающимся якорем и неподвижным индуктором называют обращенной.
Синхронные машины небольшой мощности выполняют как с неподвижным, так и с вращающимся якорем. Синхронную машину с вращающимся якорем и неподвижным индуктором называют обращенной.
Синхронные машины, как и все другие, являются обратимыми, т.е. могут работать как в двигательном, так и в генераторном режиме. Однако синхронные двигатели отличаются от генераторов конструкцией ротора, что обусловлено особенностями их пуска.
Ротор синхронного двигателя помимо обмотки возбуждения имеет дополнительную обмотку типа «беличья клетка», как у асинхронного двигателя. Синхронный двигатель подключается к сети трехфазной обмоткой статора и работает в период пуска аналогично асинхронному двигателю. При достижении частоты вращения близкой к синхронной на обмотку возбуждения подается напряжение и двигатель «входит в синхронизм» (ротор начинает вращаться с синхронной частотой).
Синхронные двигатели сохраняют неизменной частоту вращения при изменении нагрузки на валу. Они обладают большим к.п.д., чем асинхронные двигатели и более устойчивы к колебаниям напряжения питающей сети, т.к. момент, развиваемый ими, пропорционален питающему напряжению в первой степени, в то время как момент асинхронного двигателя пропорционален квадрату напряжения питающей сети.
Кроме того, они обладают еще одним полезным свойством. При снижении напряжения сети во время аварийных ситуаций реактивный ток асинхронных двигателей возрастает и они отдают в сеть дополнительную реактивную мощность, что способствует восстановлению напряжения. Таким образом, они оказывают стабилизирующее действие на работу электрической сети.
В режиме перевозбуждения при  они отдают в сеть емкостной ток, компенсируя действие активно-индуктивной нагрузки и, тем самым, повышая коэффициент мощности сети. Свойство перевозбужденной синхронной машины отдавать в сеть опережающий (емкостной) ток является в ряде случаев определяющим при выборе двигателей большой мощности для привода производственных механизмов.
они отдают в сеть емкостной ток, компенсируя действие активно-индуктивной нагрузки и, тем самым, повышая коэффициент мощности сети. Свойство перевозбужденной синхронной машины отдавать в сеть опережающий (емкостной) ток является в ряде случаев определяющим при выборе двигателей большой мощности для привода производственных механизмов.
Пример 4.1.
Задания на расчет:
Для трехфазного асинхронного двигателя с короткозамкнутым ротором, по приведенным в исходных данных задания некоторым значениям из его паспортных параметров:
1) построить принципиальную электрическую схему управления, предусмотрев в ней защиту от перегрузок;
2) определить недостающие паспортные данные;
3) рассчитать и построить примерную (по характерным точкам) механическую характеристику  , указав на ней участки допустимой длительной и кратковременной работы по условиям нагрева, а также участки устойчивой и неустойчивой работы;
, указав на ней участки допустимой длительной и кратковременной работы по условиям нагрева, а также участки устойчивой и неустойчивой работы;
4) рассчитать и построить рабочую характеристику  , т.е. зависимость к.п.д.
, т.е. зависимость к.п.д.  от коэффициента нагрузки
от коэффициента нагрузки  ;
;
5) проанализировать работу двигателя по полученным механической и рабочей характеристикам.
Исходные данные:
Тип двигателя: 4А112М2УЗ;
Схема соединения обмоток статора: Y
Номинальное напряжение сети - 
Номинальная мощность на валу: 
Номинальный к.п.д.:  ;
;
Номинальная частота вращения -  ;
;
Номинальный коэффициент мощности: 
Кратность пускового момента:  ;
;
Кратность максимального момента:  ;
;
Кратность пускового тока: 
Примечание . В номинальном режиме работы двигателя считать потери в магнитопроводе и обмотках равными, т.е.  .
.
Решение.
1. Строим схему управления асинхронным трехфазным двигателем с короткозамкнутым ротором (рис. 4.4). Подключение двигателя к трехфазной сети осуществляют главные контакты магнитного пускателя КМ. Цепь управления содержит катушку КМ, а также контакты кнопок управления SB 1, SB 2. Пуск и остановка двигателя осуществляется при нажатии на кнопки SB 2 и SB 1 соответственно. Защита двигателя от токов короткого замыкания осуществляется плавкими предохранителями FU , а защита от перегрузок тепловыми реле КК.
2. Определяем недостающие параметры асинхронного двигателя:
· Мощность, потребляемая двигателем из сети при номинальной нагрузке
 .
.
· Номинальное фазное напряжение статора при схеме соединения его обмоток по схеме «звезда»
 .
.
·
|
 |
Номинальный линейный ток двигателя
 .
.
· Номинальный фазный ток в обмотках статора при их соединении «звездой»  .
.
· Пусковой ток двигателя  .
.
· Частоту вращения магнитного поля статора.
Предпоследняя цифра в обозначении типа двигателя соответствует числу его полюсов. Для 4А112М2УЗ число полюсов - 2, следовательно, число пар полюсов -  . Тогда синхронная частота вращения при стандартной частоте тока в питающей сети (
. Тогда синхронная частота вращения при стандартной частоте тока в питающей сети (  ):
):
 .
.
· Номинальное скольжение
 .
.
· Критическое скольжение
 .
.
· Критическая частота вращения ротора

· Номинальный момент

· Начальный пусковой момент

· Критический момент

3. С троим приближенно механическую характеристику  электродвигателя (рис. 4.5) по точкам соответствующим:
электродвигателя (рис. 4.5) по точкам соответствующим:
· идеальному холостому ходу – А(  );
);
· номинальному режиму – В(  );
);
· критическому режиму – С(  );
);
· начальному пусковому режиму – D (  ).
).
 Участок АВ характеристики, соответствует допустимой длительной работе двигателя. Для данного участка момент сопротивления на валу удовлетворяет условию
Участок АВ характеристики, соответствует допустимой длительной работе двигателя. Для данного участка момент сопротивления на валу удовлетворяет условию  <
<  .
.
Кратковременная по условию перегрева работа двигателя допускается на участке ВС при  <
<  <
<  . Устойчивая работа двигателя имеет место при
. Устойчивая работа двигателя имеет место при  >
>  (участок АС), неутойчивая – при <
(участок АС), неутойчивая – при <  (участок CD ).
(участок CD ).
4. Рассчитываем и строим рабочую характеристику  данного асинхронного двигателя.
данного асинхронного двигателя.
Учитывая, что мощность потерь на перемагничивание магнитопровода  от нагрузки не зависит, а мощность электрических потерь пропорциональна квадрату тока в обмотках, получаем формулу для расчета к.п.д.
от нагрузки не зависит, а мощность электрических потерь пропорциональна квадрату тока в обмотках, получаем формулу для расчета к.п.д.
 ,
,
Согласно заданию

Рассчитанные значения к.п.д. приведены в табл. 4.1.
Таблица 4.1.
| b | 0,1 | 0,2 | 0,4 | 0,6 | 0,7 | 0,8 | 0,9 | 1,0 | 1,2 |
| η | 0,581 | 0,73 | 0,83 | 0,86 | 0,87 | 0,87 | 0,87 | 0,87 | 0,865 |
По данным табл.4.1 строим рабочую характеристику двигателя (рис.4.6).
 5. А нализируем работу двигателя по полученным механической и рабочей характеристикам.
5. А нализируем работу двигателя по полученным механической и рабочей характеристикам.
Проанализируем, как изменяется частота вращения при изменении нагрузки от  до
до  . Значения момента сопротивления на валу (если пренебречь изменением частоты вращения):
. Значения момента сопротивления на валу (если пренебречь изменением частоты вращения): 
 .
.
Им соответствует частота вращения ротора  ;
; 
Итак, с увеличением нагрузки на валу двигателя его частота вращения уменьшается. Относительное уменьшение частоты вращения на рассматриваемом участке механической характеристики составляет:
 , или 3%. Т.е. на рассматриваемом участке АВ асинхронный двигатель практически имеет неизменную частоту вращения – характеристика жесткая.
, или 3%. Т.е. на рассматриваемом участке АВ асинхронный двигатель практически имеет неизменную частоту вращения – характеристика жесткая.
Проанализируем влияние коэффициента нагрузки на к.п.д. двигателя.
Относительное изменение к.п.д. двигателя в рассматриваемом диапазоне изменения нагрузки на его валу:  или около 50%.
или около 50%.
Таким образом, изменение к.п.д. весьма значительно. Как следует из рис 4.6, к.п.д. двигателя существенно снижается при малой нагрузке, следовательно при выборе двигателя надо не допускать излишнего запаса мощности.
Литература
1. Кацман М.М. Электрические машины и трансформаторы. Ч1. – М.: Высшая школа, 1976. – 216 с.
2. Кацман М.М. Электрические машины и трансформаторы. Ч2. – М.: Высшая школа, 1978. – 181 с.
3. Липатов Д.Н. Вопросы и задачи по электротехнике для программированного обучения. – М.: Энергия, 1977. – 304 с.
Учебное издание
Дата добавления: 2019-02-12; просмотров: 172; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!