Укажите верную расчетную схему структурной группы 4-5 для силового
Тест 1
1. Приведенный момент сил полезного сопротивления определяется из условия ...
a) [ ] равенства потенциальных энергий
b) [ ] равенства мощностей
c) [ ] равенства кинетических энергий
2. Между звеном приведения (кривошипом) и исходным механизмом в общем случае должна быть обеспечена эквивалентность ...
a) [ ] потенциальных энергий
b) [ ] Кинетических, потенциальных энергий и мощностей
c) [ ] мощностей
d) [ ] Кинетических и потенциальных энергий
3. Процесс движения машинного агрегата состоит из ... , установившегося режима
и выбега
a) [ ] пускового момента
b) [ ] неустановившегося режима
c) [ ] разбега
4. Силовой анализ выполняется ...
a) [ ] от удаленной структурной группы
b) [ ] от промежуточного звена механизма
c) [ ] От входного звена механизма
d) [ ] от первой присоединненной структурной группы, если их несколько
5. «Не активные» силы - это силы ...
a) [ ] полезного сопротивления
b) [ ] тяжести
c) [ ] взаимодействия звеньев
d) [ ] сопротивления среды
6. Режимы движения машинного агрегата - это ...
a) [ ] разбег, разгон, торможение
b) [ ] разбег, торможение, установившийся режим
c) [ ] разгон, установившийся режим, торможение
d) [ ] Разгон, торможение, выбег
e) [ ] разбег, установившийся режим, выбег
7. В единицах длины измеряется(-ются)…
a) [ ] коэффициент трения качения
b) [ ] коэффициент трения скольжения
c) [ ] коэффициент трения верчения
d) [ ] все коэффициенты трения
8. Главный вектор сил инерции R и главный момент сил инерции L0 точек звена совершающего ускоренное прямолинейное поступательное движение, удовлетворяет соотношениям:
a) [ ] R=0; L0=0
b) [ ] R=0; L0 ¹ 0
c) [ ] R ¹ 0; L0=0
d) [ ] R ¹ 0; L0 ¹ 0
9. Статическим уравновешиванием вращающегося звена называется ...
a) [ ] распределение масс вращающегося звена, при котором главные центральные оси инерции не пересекают ось вращения звена
b) [ ] распределение масс вращающегося звена, переводящее его центр масс на ось вращения
c) [ ] распределение масс вращающегося звена, при котором одна из его главных центральных осей инерции располагается параллельно оси вращения
d) [ ] распределение масс вращающегося звена, совмещающее одну из его главных осей инерции с осью вращения
10. Кинетостатический метод расчета механизмов основан на учете
сил и моментов ... звеньев
a) [ ] полезного сопротивления
b) [ ] инерции
c) [ ] тяжести
d) [ ] трения
11. Звену, совершающему поступательное движение,
соответствует инерционная нагрузка ...
a) [ ] Ф = 0; М ф = 0
b) [ ] Ф = 0; М ф ¹ 0
c) [ ] Ф ¹ 0; М ф ¹ 0
d) [ ] Ф ¹ 0; М ф =0
12. Уравнение для определения кинетической энергии звена,
совершающего поступательное движение, имеет вид ...
a) [ ] T = mV 2 / 2
b) [ ] T = mV 2 / 2 +J w 2 /2
c) [ ] T = J w 2 /2
13. Уравнение для расчета момента инерции маховика ...
a) [ ] Jмахов = <kl> m T /(2 w d 2 )
b) [ ] Jмахов = 2<kl> m T /( w 2 d)
c) [ ] Jмахов = <kl> m T /( w 2 d)
d) [ ] Jмахов = <kl> m T /(2 w 2 d)
14. Приведенный момент инерции определяется из условия ...
a) [ ] равенства потенциальных энергий
b) [ ] равенства мощностей
c) [ ] равенства кинетических энергий
15. Ротор, имеющий моментную уравновешенность: ...
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
16. Сбалансированный ротор ... при изменении угловой скорости начального звена
a) [ ] теряет балансировку
b) [ ] меняет положение центра масс
c) [ ] остается уравновешенным
17. Ротором в теории уравновешивания называется ...
a) [ ] любое тело, совершающее поступательное движение
b) [ ] любое тело, для которого главный вектор и главный момент сил инерции не постоянны
c) [ ] любое тело, совершающее вращательное движение
d) [ ] любое тело, совершающее плоскопараллельное движение
18. Момент, действующий на начальное звено и обеспечивающий заданный закон
её движения, называется:...
a) [ ] уравновешивающим
b) [ ] трения
c) [ ] полезного сопротивления
d) [ ] движущим
19. Установившийся режим характеризуется ...
a) [ ] переодическими изменениями скорости
b) [ ] чередованием периодических и апериодических изменений скорости
c) [ ] апериодическими изменениями скорости
20. Если r пр = 2 м, r 1 - 0,5 м, m 1 = 4 кг, то масса противовеса равна ...

a) [ ] 1 кг
b) [ ] 1,5 кг
c) [ ] 0,5 кг
d) [ ] 2,5 кг
e) [ ] 2 кг
21. Приведенной силой механизма с одной степенью свободы называется сила...
a) [ ] условно приложенная к одной из точек механизма и определяется из условия равенства элементарной работы этой силы и суммы элементарных работ сил и пар сил, действующих на ведущие звенья механизма
b) [ ] условно приложенная к одной из точек механизма и равна сумме всех сил и пар сил, действующих на подвижные звенья механизма
c) [ ] условно приложенная к одной из точек механизма и равна сумме всех сил , действующих на звенья механизма
d) [ ] условно приложенная к одной из точек механизма и определяется из условия равенства элементарной работы этой силы и суммы элементарных работ сил и пар сил, действующих на звенья механизма
22. "Внутренние" силы - это силы ...
a) [ ] взаимодействия звеньев
b) [ ] движущие
c) [ ] сопротивления среды
d) [ ] тяжести
e) [ ] полезного сопротивления
23. Уравнение движения механизма с одной степенью свободы в интегральной форме записывается в виде (Jпр - приведенный момент инерции, Мпр - приведенный момент сил, j - угловая координата звена приведения, w - угловая скорость звена приведения)
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
24. Приведенной массой механизма с одной степенью свободы называется масса, ...
a) [ ] которую надо сосредоточить в данной точке механизма (точке приведения), чтобы кинетическая энергия этой материальной точки равнялась сумме кинетических энергий ведущих звеньев механизма.
b) [ ] которую надо сосредоточить в данной точке механизма (точке приведения), и определяется как сумма масс всех подвижных звеньев механизма.
c) [ ] которую надо сосредоточить в данной точке механизма (точке приведения), чтобы кинетическая энергия этой материальной точки равнялась сумме кинетических энергий всех звеньев механизма.
d) [ ] которую надо сосредоточить в данной точке механизма (точке приведения), и определяется как сумма масс всех звеньев механизма.
25. Необходимое условие разбега (Ас - работа сил сопротивления за цикл, Адв - работа движущих сил за цикл) ...
a) [ ] Ас¹Адв
b) [ ] Ас>Адв
c) [ ] Адв>Ас
d) [ ] Ас = Адв
26. ... возникает при совпадении частоты вынужденных колебаний механизма
с частотой собственных колебаний
a) [ ] диссонанс
b) [ ] резонанс
c) [ ] амортизация
d) [ ] вибрация
27. Необходимое условие установившегося режима движения (Ас - работа сил сопротивления за цикл, Адв - работа движущих сил за цикл)
a) [ ] Ас¹Адв
b) [ ] Ас>Адв
c) [ ] Ас = Адв
d) [ ] Адв>Ас
28. При установившемся режиме работа за цикл сил сопротивления ... работы(е) движущих сил
a) [ ] меньше
b) [ ] больше
c) [ ] равна
29. Физический смысл статического уравновешивания ротора: ...
a) [ ] ось вращения ротора является главной осью инерции
b) [ ] центр масс ротора в процессе его вращения перемещается от оси вращения к ободу
c) [ ] центр масс ротора находится на его ободе
d) [ ] центр масс ротора нахрдится на оси его вращения
30. Динамической моделью многозвенного механизма с одной степенью свободы называется ...
a) [ ] система дифференциальных уравнений, устанавливающих зависимость скоростей промежуточных и выходных звеньев механизма от скорости входного звена
b) [ ] условное звено, закон движения которого полностью совпадает с законом движения одного из звеньев механизма
c) [ ] система дифференциальных уравнений, устанавливающих зависимость скорости выходного звена механизма от системы сил, действующих на его звенья.
d) [ ] входное звено механизма, масса каторого равна сумме масс подвижных звеньев механизма
e) [ ] входное звено механизма, нагруженное силой и парой сил, равными соответственно геометрической сумме всех сил и пар сил, действующих на звенья механизма.
31. Если статический дисбаланс равен 2 кг*м, а масса противовеса равна 0,5 кг, то радиус противовеса равен: ...
a) [ ] 5
b) [ ] 2
c) [ ] 4
d) [ ] 1
e) [ ] 3
32. Ротор, имеющий динамическую неуравновешенность...
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ]
33. Силы инерции направляются ...
a) [ ] противоположно вектору скорости в кинематической паре
b) [ ] по направлению вектора скорости в центре масс
c) [ ] по направлению вектора скорости в кинематической паре
d) [ ] противоположно вектору ускорения в кинематической паре
e) [ ] противоположно вектору ускорения в центре масс
f) [ ] противоположно вектору скорости в центре масс
g) [ ] по направлению вектора ускорения в центре масс
34. На неравномерность вращения входного звена влияют ...
a) [ ] переменность угловых скоростей и угловых ускорений звеньев механизма
b) [ ] переменность приведенного момента сил сопротивления и приведенного момента инерции
35. В поступательной паре о реакции в общем случае известна(о) ...
a) [ ] только точка приложения реакции
b) [ ] только направление реакции
c) [ ] точка приложения и направление реакции
36. Направление вектора силы трения ... направлением вектора скорости
a) [ ] перпендикулярно
b) [ ] совпадает
c) [ ] образует определенный угол с
d) [ ] противоположно
37. Сила взаимодействия двух звеньев в высшей паре при отсутствии трения направлена ...
a) [ ] противоположно вектору ускорения
b) [ ] по нормали к их поверхности
c) [ ] по направлению вектора ускорения
d) [ ] по касательной их поверхности
38. В основу силового анализа заложен принцип ...
a) [ ] декомпозиции
b) [ ] Даламбера
c) [ ] возможных перемещений
39. В результате силового анализа методом планов определяют ....
a) [ ] только реакции в кинематических парах
b) [ ] реакции в кинематических парах и уравновешивающий момент
c) [ ] только уравновешивающий момент
40. Условие моментного уравновешивания записывается выражением: ...
a) [ ] S m A (Gi) = 0
b) [ ] S m A (Gi) = 0
c) [ ] S m A (Фi) = 0
d) [ ] S Gi = 0
41. Силы тяжести совершают ...
a) [ ] как положительную, так и отрицательную работу
b) [ ] только положительную работу
c) [ ] работы не совершают
d) [ ] только отрицательную работу
42. Динамической моделью называется…
a) [ ] схема механизма, необходимая для составления уравнений динамики
b) [ ] кинематическая схема с отмеченными на ней шатунными кривыми
c) [ ] уравнение движения в энергетической форме
d) [ ] уравнение движения в дифференциальной форме
43. Главный вектор сил инерции R и главный момент сил инерции L0 точек звена совершающего равномерное прямолинейное поступательное движение, удовлетворяет соотношениям: ...
a) [ ] R ¹ 0; L0 ¹ 0
b) [ ] R=0; L0 ¹ 0
c) [ ] R ¹ 0; L0=0
d) [ ] R=0; L0=0
44. Полное динамическое уравновешивание достигается при условии выполнения ...
a) [ ] Моментного уравновешивания
b) [ ] Как статического, так и моментного уравновешивания
c) [ ] Статического уравновешивания
45. 
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
46. Трением ... называется внешнее трение при относительном покое соприкасающихся тел
a) [ ] верчения
b) [ ] скольжения
c) [ ] покоя
d) [ ] скольжения
47. Условие статической уравновешенности механизма можно записать, как ...
a) [ ] м ФS ¹ 0
b) [ ] м ФS = 0
c) [ ] ФS ¹ 0
d) [ ] ФS = 0
48. Диаграмма "Энергия-масса" обладает следующим свойством: ...
a) [ ] косинус угла наклона прямой, соединяющей любую точку диаграммы с началом координат, прямо пропорционален квадрату угловой скорости входного звена
b) [ ] косинус угла наклона прямой, соединяющей любую точку диаграммы с началом координат, обратно пропорционален квадрату угловой скорости входного звена
c) [ ] тангенс угла наклона прямой, соединяющей любую точку диаграммы с началом координат, прямо пропорционален квадрату угловой скорости входного звена
d) [ ] тангенс угла наклона прямой, соединяющей любую точку диаграммы с началом координат, обратно пропорционален квадрату угловой скорости входного звена
49. Силовой расчет механизмов с учетом сил инерции звеньев называют ...
a) [ ] кинетостатическим
b) [ ] инерционным
c) [ ] статическим
50. Статический дисбаланс точечной массы - это ...
a) [ ] векторная сумма сил инерции
b) [ ] векторная сумма сил инерции
c) [ ] произведение массы не ее радиус-вектор
d) [ ] произведение силы инерции на радиус-вектор
51. Внешним трением называется ...
a) [ ] противодействие относительному перемещению соприкасающихся тел в направлении, лежащем в плоскости их соприкосновения
b) [ ] противодействие относительному перемещению отдельных частей одного и того же тела при его деформации
c) [ ] противодействие относительному перемещению соприкасающихся тел в направлении, нормальном к плоскости их соприкосновения
d) [ ] противодействие относительному перемещению соприкасающихся тел
52. В физическом смысле маховик является ...
a) [ ] аккумулятором мощности
b) [ ] аккумулятором потенциальной энергии
c) [ ] аккумулятором кинетической энкргии
53. Моментным уравновешиванием вращающегося звена называется ...
a) [ ] распределение масс вращающегося звена, при котором главные центральные оси инерции не пересекают ось вращения звена
b) [ ] распределение масс вращающегося звена, совмещающее одну из его главных осей инерции с осью вращения
c) [ ] распределение масс вращающегося звена, при котором одна из его главных центральных осей инерции располагается параллельно оси вращения
d) [ ] распределение масс вращающегося звена, переводящее его центр масс на ось вращения
54. Силой трения ... называется составляющая полной реакции для трущихся тел, лежащая в общей касательной плоскости к поверхности контакта и направленная в сторону, противоположную их относительному смещению.
a) [ ] покоя
b) [ ] верчения
c) [ ] качения
d) [ ] скольжения
55. Трением ... называется внешнее трение при относительном качении соприкасающихся тел
a) [ ] верчения
b) [ ] качения
c) [ ] покоя
d) [ ] скольжения
56. График работы сил полезного сопротивления строится путем ...
a) [ ] интегрирования графика приведенного момента сопротивления
b) [ ] интегрирования графика приведенного момента инерции
c) [ ] интегрирования графика приращения кинетической энергии
d) [ ] дифференцирования графика приведенного момента инерции
57. Уравнение .... соответствует "Рычагу Жуковского"

a) [ ] -R43 ×hR43 + G3 ×hG3 - G2 ×hG2 - Ф3 × hФ3 + Ф2 × hФ2 - M*3 + M*2 =0
b) [ ] R43 ×hR43 + G3 ×hG3 - G2 ×hG2 - Ф3 × hФ3 + Ф2 × hФ2 - M*3 - M*2 =0
c) [ ] R43 ×hR43 + G3 ×hG3 - G2 ×hG2 + Ф3 × hФ3 + Ф2 × hФ2 - M*3 + M*2 =0
d) [ ] -R43 ×hR43 + G3 ×hG3 + G2 ×hG2 - Ф3 × hФ3 + Ф2 × hФ2 - M*3 - M*2 =0
58. В уравнении для определения КПД зубчатых передач, имеющих один ведущий и один ведомый валы,  отношение работ, совершаемых за цикл (Апс - работа сил полезного сопротивления за время одного цикла;
отношение работ, совершаемых за цикл (Апс - работа сил полезного сопротивления за время одного цикла;  - работа сил движущих за время одного цикла), можно заменить отношением …
- работа сил движущих за время одного цикла), можно заменить отношением …
a) [ ] скоростей
b) [ ] ускорений
c) [ ] продолжительностей циклов
d) [ ] моментов
59. Размеры и массу маховика уменьшают, ...
a) [ ] устанавливая маховик на тихоходный вал
b) [ ] повышая угловую скорость вращения начального вала
c) [ ] понижая угловую скорость вращения начального вала
d) [ ] устанавливая маховик на более быстроходный вал
60. Равномерность движения механизма оценивается коэффициентом...
a) [ ] неравномерности
b) [ ] равномерности
c) [ ] движения
d) [ ] динамичности
61. Использование рычага Жуковского при силовом анализе механизма
предусматривает перенесение всех известных сил в одноименные точки
повернутого плана скоростей ...
a) [ ] по направлению ускорения точки приложения силы
b) [ ] с сохранением направления сил
c) [ ] без учета направления сил
d) [ ] с изменением направления сил
62. Динамической моделью называется…
a) [ ] уравнение движения в энергетической форме
b) [ ] схема механизма, необходимая для составления уравнений динамики 
c) [ ] уравнение движения в дифференциальной форме
d) [ ] кинематическая схема с отмеченными на ней шатунными кривыми
63. Кинетостатический метод расчета механизмов основан на учете ...
a) [ ] уравновешивающей силы
b) [ ] сил и моментов инерции звеньев
c) [ ] уравновешивающей силы и сил внутреннего взаимодействия звеньев
d) [ ] сил внутреннего взаимодействия звеньев
64. На рисунке приведен график зависимости угловой скорости начального звена механизма от времени. Режим движения механизма, соответствующий участку 3 графика называется фазой ....

a) [ ] периодического движения
b) [ ] выбега
c) [ ] установившегося движения
d) [ ] разбега
65. Во вращательной кинематической паре о реакции известна(о) ...
a) [ ] точка приложения, направление
b) [ ] только точка приложения
c) [ ] только направление
66. Силы и моменты совершающие отрицательную работу или работу равную нулю приложены к ....
a) [ ] ведущим звеньям
b) [ ] ведомым звеньям
c) [ ] ни к одному из звеньев
d) [ ] промежуточным звеньям
67. Трением с ... смазочным материалом называют трение, при котором поверхности трущихся твердых тел отделены друг от друга слоем жидкости.
a) [ ] полужидким
b) [ ] жидким
c) [ ] газообразным
d) [ ] твердым
68. Коэффициент неравномерности входного звена определяется по формуле ...
a) [ ] d =( w max + w min )/ w min
b) [ ] d =( w max - w min )/ w ср
c) [ ] d =( w max + w min )/ w ср
d) [ ] d =( w max - w min )/ w max
69. Динамической неуравновешенностью вращающегося звена называется ...
a) [ ] распределение масс вращающегося звена, совмещающее одну из его главных осей инерции с осью вращения
b) [ ]
c) [ ] распределение масс вращающегося звена, при котором главные центральные оси инерции не пересекают ось вращения звена
d) [ ] распределение масс вращающегося звена, переводящее его центр масс на ось вращения
70. Средняя скоростьопределяется по формуле ...
a) [ ] w ср =( w max + w min ) 2 / 2
b) [ ] w ср =( w max + w min )/2
c) [ ] w ср =( w max - w min ) 2 / 2
d) [ ] w ср =( w max - w min )/2
71. ... трением называется внешнее трение, при котором трущиеся поверхности соприкасающихся тел есть тонкий слой (порядка 1 мкм и менее) слой смазки, обладающий свойствами, отличными от ее объемных свойств.
a) [ ] полужидкостным
b) [ ] жидкостным
c) [ ] граничным
d) [ ] сухим
72. Активные силы...
a) [ ] только силы и моменты сопротивления
b) [ ] только силы тяжести
c) [ ] силы и моменты движущие, силы и моменты сопротивления, силы тяжести.
d) [ ] только силы и моменты движущие
73. Графическая часть расчета маховика способом Виттенбауэра заканчивается ...
a) [ ] построением графика работы сил сопротивления
b) [ ] проведением касательных к диаграмме энергомасс
c) [ ] построением графика приведенного момента инерции
d) [ ] построением графика приведенного момента сил сопротивления
e) [ ] построением диаграммы энергомасс
74. На рисунке представлена циклограмма работы кривошипно-ползунного механизма.
Правильное направление силы сопротивления (силы полезного сопротивления)
 обозначено цифрой…
обозначено цифрой…

a) [ ] 2
b) [ ] 1
c) [ ] 4
d) [ ] 3
75. Трением ... называется внешнее трение при относительном вращении одного тела относительно другого вокруг общей нормали к поверхностям их соприкосновения
a) [ ] качения
b) [ ] верчения
c) [ ] покоя
d) [ ] скольжения
76. КПД механизма вычисляется по формуле .....
(Aпc - работа сил полезного сопротивления за время одного цикла;
 - работа сил движущих за время одного цикла)…
- работа сил движущих за время одного цикла)…
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
77. Уравнение для определения кинетической энергии звена,
совершающего вращательное движение, имеет вид ...
a) [ ] T = J w 2 /2
b) [ ] T = mV 2 / 2 +J w 2 /2
c) [ ] T = mV 2 / 2
78. Маховик в механизмах ...
a) [ ] уменьшает вибрацию при работе механизма
b) [ ] изменяет направление вращения начального звена
c) [ ] увеличивает амплитуду периодических колебаний скорости начального звена
d) [ ] уменьшает амплитуду периодических колебаний скорости начального звена
79. Статического уравновешивания звеньев достигают, используя ...
a) [ ] противовесы
b) [ ] пружины
c) [ ] зубчатые колеса
d) [ ] маховики
80. Способ определения приведенного момента инерции маховика
с помощью графика энергомасс называют методом ...
a) [ ] планов
b) [ ] Жуковского
c) [ ] Эйлера
d) [ ] Виттенбауэра
81. Правильное направление реакции в т. C при силовом расчёте обозначено цифрой…
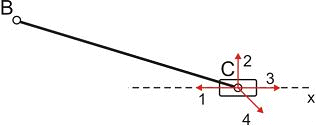
a) [ ] 1
b) [ ] 3
c) [ ] 4
d) [ ] 2
82. ... трением называется внешнее трение, при котором трущиеся поверхности соприкасающихся тел покрыты пленками окислов и адсорбированными молекулами газов, а смазка отсутствует.
a) [ ] полужидкостным
b) [ ] граничным
c) [ ] сухим
d) [ ] жидкостным
83. Силовой расчёт механизма позволяет…
a) [ ] определить уравновешивающую силу на входном звене, а также силы, действующие в кинематических парах
b) [ ] определить скорости и ускорения точек звеньев механизма
c) [ ] определить силу сопротивления (силу полезного сопротивления) на выходном звене
d) [ ] определить размеры звеньев
84. Модули главного вектора  и главного момента
и главного момента  сил инерции ползуна 3 кривошипно-ползунного механизма (см. рисунок) определяются зависимостями … (
сил инерции ползуна 3 кривошипно-ползунного механизма (см. рисунок) определяются зависимостями … (  - момент инерции ползуна 3 относительно оси, проходящей через центр масс
- момент инерции ползуна 3 относительно оси, проходящей через центр масс  перпендикулярно плоскости чертежа;
перпендикулярно плоскости чертежа;  - масса ползуна 3; угловая скорость кривошипа 1 постоянна,
- масса ползуна 3; угловая скорость кривошипа 1 постоянна,  )
)

a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
85. Условие статического уравновешивания ротора соответствует выражению: ...
a) [ ] S Фi = 0
b) [ ] S m A (Gi) = 0
c) [ ] S m A (Фi) = 0
86. Неуравновешенность ротора вызывает ...
a) [ ] неравномерность вращения главного вала
b) [ ] повышение динамических нагрузок на опоры
c) [ ] увеличение угловой скорости вращения главного вала
d) [ ] уменьшение угловой скорости вращения главного вала
87. ... трением называется противодействие относительному перемещению отдельных частей одного и того же тела при его деформации
a) [ ] поверхностным
b) [ ] внешним
c) [ ] внутренним
d) [ ] наружным
88. При последовательном соединении n механизмов общий КПД определяется как…
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
89. Приведенным моментом механизма с одной степенью свободы называется момент, ...
a) [ ] условно приложенный к одному из звеньев механизма и определяется из условия равенства элементарной работы этого момента и суммы элементарных работ сил и пар сил, действующих на звенья механизма
b) [ ] условно приложенный к одному из звеньев механизма и равняется сумме сил и пар сил, действующих на звенья механизма
c) [ ] условно приложенный к одному из звеньев механизма и равняется сумме сил и пар сил, действующих на подвижные звенья механизма
d) [ ] условно приложенный к одному из звеньев механизма и определяется из условия равенства элементарной работы этого момента и суммы элементарных работ сил и пар сил, действующих на ведущие звенья механизма
90. Звену, совершающему плоскопараллельное движение,
соответствует инерционная нагрузка ...
a) [ ] Ф = 0; М ф ¹ 0
b) [ ] Ф ¹ 0; М ф =0
c) [ ] Ф ¹ 0; М ф ¹ 0
d) [ ] Ф = 0; М ф = 0
91. Уравнения, устанавливающие взаимосвязь между кинематическими характеристиками
движения звеньев механизма, приложенными к ним силами, размерами, массами и
моментами инерции звеньев называются ...
a) [ ] уравнениями движения механизма
b) [ ] уравнениями Лагранжа
c) [ ] уравнениями замкнутого векторного контура
d) [ ] уравнениями преобразования координат
e) [ ] уравнениями Даламбера
92.
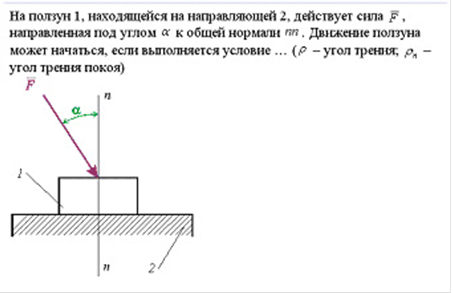
a) [ ] a > r п
c) [ ] a < r п
d) [ ] a = r п
93. Реакция между ползуном и направляющей направлена ...
a) [ ] под углом 45 грудусов к направляющей
b) [ ] перпендикулярно направляющей
c) [ ] параллельно направляющей
94. Трением ... называется внешнее трение при относительном скольжении соприкасающихся тел
a) [ ] качения
b) [ ] скольжения
c) [ ] покоя
d) [ ] верчения
95. Разбег является ... режимом
a) [ ] переодическим
b) [ ] с постоянной угловой скоростью
c) [ ] непериодическим
96. Полужидкостным трением называется …
a) [ ] внешнее трение, при котором трущиеся поверхности соприкасающихся тел покрыты пленками окислов и адсорбированными молекулами газов или жидкостей, а смазка отсутствует
b) [ ] внешнее трение, при котором между трущимися поверхностями соприкасающихся тел есть тонкий (порядка 0,1 мкм и менее) слой смазки, обладающий свойствами, отличными от её обычных объемных свойств
c) [ ] внешнее трение, при котором между трущимися поверхностями соприкасающихся тел есть слой смазки с обычными объемными свойствами
d) [ ] трение, при котором поверхности трущихся твердых тел полностью отделены друг от друга слоем жидкости
97. Динамическим уравновешиванием вращающегося звена называется ....
a) [ ] распределение масс вращающегося звена, при котором одна из его главных центральных осей инерции располагается параллельно оси вращения
b) [ ] распределение масс вращающегося звена, при котором главные центральные оси инерции не пересекают ось вращения звена
c) [ ] распределение масс вращающегося звена, совмещающее одну из его главных осей инерции с осью вращения
d) [ ] распределение масс вращающегося звена, переводящее его центр масс на ось вращения
98. Выбег является ...
a) [ ] непериодическим
b) [ ] с постоянной угловой скоростью
c) [ ] периодическим
99. Ротор, имеющий динамическую уравновешенность: ...
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
100. Уравнение движения механизма с одной степенью свободы записывается в виде (Jпр - приведенный момент инерции, Мпр - приведенный момент сил, j - угловая координата звена приведения, w - угловая скорость звена приведения, t - время) ...
a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
101. Кинетическая энергия шатуна 2  рассчитывается по формуле .......
рассчитывается по формуле .......
(  - момент инерции шатуна относительно оси, проходящей через центр масс
- момент инерции шатуна относительно оси, проходящей через центр масс
перпендикулярно плоскости чертежа;  - масса шатуна;
- масса шатуна;
 - угловая скорость шатуна;
- угловая скорость шатуна;  - скорость т.
- скорость т.  шатуна).
шатуна).

a) [ ] 
b) [ ] 
c) [ ] 
d) [ ] 
102. Силы и моменты совершающие положительную работу приложены к ...
a) [ ] ведущим звеньям
b) [ ] не приложены ни к одному из звеньев
c) [ ] промежуточным звеньям
d) [ ] ведомым звеньям
103. Ротор, имеющий статическую уравновешенность: ...
a) [ ] 
b) [ ]
c) [ ] 
d) [ ] 
104. Приведенным моментом инерции механизма с одной степенью свободы называется момент которым должно обладать звено (звено приведения), ...
a) [ ]
b) [ ] чтобы приведенный момент инерции равнялся сумме моментов инерции всех звеньев механизма.
c) [ ] чтобы кинетическая энергия этого звена равнялась сумме кинетических энергий всех звеньев механизма.
d) [ ] чтобы кинетическая энергия этого звена равнялась сумме кинетических энергий ведущих звеньев механизма.
105. Скорость главного вала (начального звена) при установившемся режиме
движения машинного агрегата ...
a) [ ] меняется периодически
b) [ ] достигает минимального значения
c) [ ] остается постоянной
d) [ ] достигает максимального значения
106. КПД механизма вычисляется по формуле _____________ (  - работа сил полезного сопротивления за время одного цикла;
- работа сил полезного сопротивления за время одного цикла;  - работа сил движущих за время одного цикла) …
- работа сил движущих за время одного цикла) …
a) [ ] 
b) [ ]
c) [ ] 
d) [ ] 
107. Необходимое условие выбега (Ас - работа сил сопротивления за цикл, Адв - работа движущих сил за цикл) ...
a) [ ] Ас = Адв
b) [ ] Ас¹Адв
c) [ ] Ас>Адв
d) [ ] Адв>Ас
108. Установившимся движением механизма называется....
a) [ ] движение, при котором кинетическая энергия механизма убывает
b) [ ] движение, при котором кинетическая энергия меъанизма возрастает
c) [ ] движение, при котором кинетическая энергия постоянна или является периодической функцией времени
109. Силовой расчет, основанный на применении принципа Даламбера называется...
a) [ ] кинематическим
b) [ ] динамическим
c) [ ] статическим
d) [ ] кинетостатическим
110. Приведенный к "Рычагу Жуковского" момент силы инерции М*2 направлен ... , момент М*3 направлен ...
Против часовой стрелки (+), по часовой стрелки (-).

a) [ ] M* 3 (-)
b) [ ] M* 3 (+)
c) [ ] M* 2 (+)
d) [ ] M* 2 (-)
111. Моменты сил инерции звеньев направляются ...
a) [ ] в сторону угловой скорости звена
b) [ ] противоположно угловому ускорению звена
c) [ ] противоположно угловой скорости звена
d) [ ] в сторону углового ускорения звена
112. Главный вектор сил инерции звена, совершающего поступательное движение, направлен ...
a) [ ] независимо от направления ускорения звена
b) [ ] перпендикулярно направлению ускорения звена
c) [ ] противоположно направлению ускорения звена
d) [ ] по направлению ускорения звена
113. В высшей кинематической паре о реакции известна(о) ...
a) [ ] только направление
b) [ ] точка приложения и направление
c) [ ] только точка приложения
114. Главный вектор сил инерции R и главный момент сил инерции L0 точек звена совершающего ускоренное вращательное движение вокруг оси, проходящей через центр масс, удовлетворяет соотношениям:
a) [ ] R ¹ 0; L0 ¹ 0
b) [ ] R=0; L0=0
c) [ ] R=0; L0 ¹ 0
d) [ ] R ¹ 0; L0=0
115. Силы тяжести при силовом анализе прикладываются в ....
a) [ ] в центрах масс звеньв
b) [ ] на середине звеньев
c) [ ] в кинематических парах
116. В результате силового анализа методом Рычага Жуковского определяют ...
a) [ ] только уравновешивающий момент
b) [ ] уравновешивающий момент и реакции в кинематических парах
c) [ ] только реакции в кинематических парах
117. На рисунке приведен график зависимости угловой скорости начального звена механизма от времени. Режим движения механизма, соответствующий участку 1 графика называется фазой ...
a) [ ] выбега
b) [ ] торможения
c) [ ] установившегося движения
d) [ ] разбега.
118. На рисунке представлена тахограмма работы механизма  . Режим движения механизма, соответствующий данному закону, называется…
. Режим движения механизма, соответствующий данному закону, называется…

a) [ ] установившимся
b) [ ] неустановившимся
c) [ ] выбегом
d) [ ] разбегом
119. Главный вектор сил инерции R и главный момент сил инерции L0 точек звена совершающего равномерное вращательное движение вокруг оси, проходящей через центр масс, удовлетворяет соотношениям: ...
a) [ ] R=0; L0=0
b) [ ] R ¹ 0; L0 ¹ 0
c) [ ] R=0; L0 ¹ 0
d) [ ] R ¹ 0; L0=0
120. О направлении силы полезного сопротивления известно, что она ...
a) [ ] направлена в ту же сторону, что и линейное ускорение в точке приложения силы
b) [ ] направлена в ту же сторону, что и линейная скорость в точке приложения силы
c) [ ] Сила направлена противоположно вектору ускорения в точке ее приложения
d) [ ] направлена противоположно вектору скорости в точке ее приложения
121. На рисунке приведен график зависимости угловой скорости начального звена механизма от времени. Режим движения механизма, соответствующий участку 2 графика называется фазой ....

a) [ ] выбега
b) [ ] установившегося движения
c) [ ] торможения
d) [ ] разбега
122. На рисунке показана кинематическая схема шестизвенного плоского механизма.
Укажите верную расчетную схему структурной группы 4-5 для силового
Дата добавления: 2019-02-12; просмотров: 375; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!