Разработка математической модели векторной системы управления с ориентацией по потокосцеплению ротора
Тема РГЗ: Расчет и моделирование векторной системы управление электроприводом с ориентацией по потокосцеплению ротора
Расчет
Известно множество способов векторного управления, среди которых наибольшее распространение получил способ с ориентацией по вектору потокосцепления ротора. Согласно данному способу асинхронный двигатель приобретает характеристики близкие к характеристикам двигателя постоянного тока. При этом в приводе реализуется раздельное регулирование магнитного потока и электромагнитного момента двигателя, а в режиме поддержания постоянства потокосцепления ротора обеспечивается предельно допустимое быстродействие при управлении моментом. Использование данного способа позволит осуществить плавный переход от экскаваторного электропривода постоянного тока к частотно-регулируемому электроприводу.
Технические данные двигателя АИРМ132S1
| Параметр двигателя | Значение |
| Номинальная мощность Рн, кВт | 15 |
Номинальная скорость  , об/мин , об/мин
| 3000 |
| Номинальный ток Iн, A | 6,3 |
| Коэффициент мощности cosφ,% | 86 |
| Коэффициент полезного действия η, % | 87.5 |
| Активное сопротивление статора R1, Ом | 0.69 |
| Индуктивное сопротивление статора X1, Ом | 1.24 |
| Приведенное активное сопротивления ротора R'2, Ом | 0,48 |
| Приведенное индуктивное сопротивления ротора X'2, Ом | 1.894 |
| Индуктивное сопротивление цепи намагничивания Xμ, Ом | 44 |
Момент инерции двигателя  , , 
| 0.028 |
2.2.1 Расчет параметров двигателя
Взаимная индуктивность статора и ротора АД, определяется согласно (2.9):  Гн. (2.9)
Гн. (2.9)
Аналогично определим индуктивность рассеяния статора и ротора:
 Гн,
Гн,
 Гн.
Гн.
Полная индуктивность статора и ротора АД, определяется согласно (2.10):  , (2.10)
, (2.10)
 Гн,
Гн,
 Гн.
Гн.
Постоянные времени обмоток статора и ротора, определяются по выражению (2.11):  , (2.11)
, (2.11)
 с,
с,
 с.
с.
Безразмерный коэффициент k определяется согласно выражению (2.12):  , (2.12)
, (2.12)
 ,
,
 .
.
По формуле (2.13) рассчитаем малую постоянную времени при отсутствии запаздывания в определении потокосцепления ротора:
 , (2.13)
, (2.13)
где  - частота коммутации транзисторов, Гц.
- частота коммутации транзисторов, Гц.
 с.
с.
Коэффициент рассеяния машины определим согласно (2.14):
 . (2.14)
. (2.14)
2.2.2 Расчет контура тока (релейный регулятор)
Коэффициент передачи преобразователя рассчитаем согласно (2.15):
 , (2.15)
, (2.15)
где  - номинальное фазное напряжение сети, В;
- номинальное фазное напряжение сети, В;
 - максимальное напряжение задания, В.
- максимальное напряжение задания, В.
Коэффициент обратной связи по току определим согласно (2.16):
 (2.16)
(2.16)
В выражении (2.16) берется максимальное амплитудное значение тока при трехкратной перегрузке.
2.2.3 Расчет контура регулирования потокосцепления ротора (ПИ - регулятор)
Определим номинальное потокосцепление ротора (2.17):
 (2.17)
(2.17)
где  - ток холостого хода, принимается равным 30% от номинального, А.
- ток холостого хода, принимается равным 30% от номинального, А.
Коэффициент обратной связи по потокосцеплению определим согласно (2.18):
 . (2.18)
. (2.18)
Определяем пропорциональный коэффициент регулятора потока по формуле (2.19):
 . (2.19)
. (2.19)
Интегральный коэффициент регулятора потока рассчитывается по формуле (2.20):
 . (2.20)
. (2.20)
2.2.4 Расчет контура регулирования электромагнитного момента двигателя (И - регулятор)
Определяем коэффициент обратной связи по моменту (для расчета контура скорости) по формуле (2.21):
 . (2.21)
. (2.21)
В выражении (2.20) закладывается двойная перегрузка по моменту.
Также определим коэффициент обратной связи по моменту с учетом внутреннего контура тока согласно (2.22):
 . (2.22)
. (2.22)
Определяем интегральный коэффициент регулятора момента по формуле (2.23):
 (2.23)
(2.23)
2.2.5 Расчет контура скорости (П - регулятор)
Определяем коэффициент обратной связи по скорости согласно выражению (2.24):
 . (2.24)
. (2.24)
Малая постоянная времени контура регулирования скорости двигателя определяется по формуле (2.25):
 с. (2.25)
с. (2.25)
Определяем коэффициент регулятора скорости по формуле (2.26):
 . (2.26)
. (2.26)
Разработка математической модели векторной системы управления с ориентацией по потокосцеплению ротора
2.3.1 Математическая модель векторного управления АД, разработанная в программном пакете Matlab/Simulink
По рисунку 2.1 и с учетом рассчитанных коэффициентов реализована математическая модель векторной системы управления (рисунок 2.3), позволяющая исследовать динамические свойства системы.
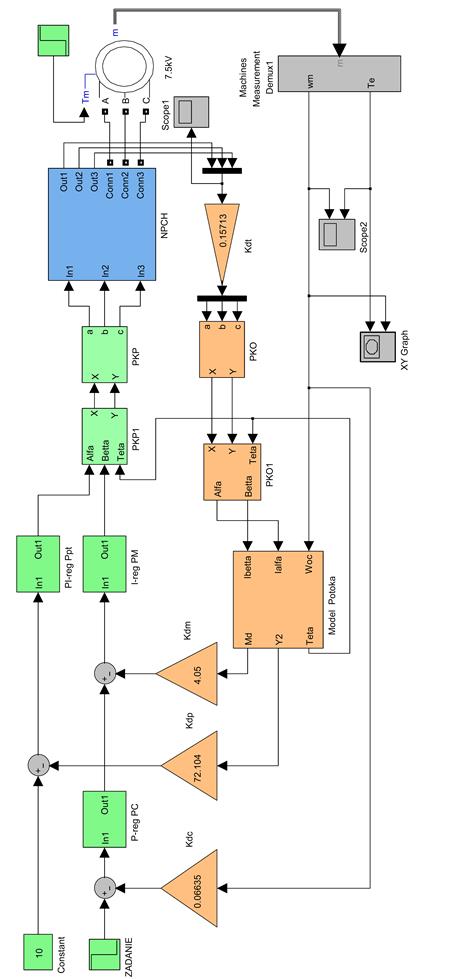
| Рис. 2.3 Математическая модель векторного управления АД, разработанная в программном пакете Matlab/Simulink |
Основными узлами (блоками) модели, подробное описание которых изложено выше, являются:
– «NPCH» – блок, моделирующий преобразователь частоты работающего в режиме источника тока;
– «Model Potoka» – блок, моделирующий модель потока (рисунок 2.4).

Рис. 2.4 Реализация модели потока в программном пакете Matlab/Simulink
– «PKP», «PKP1», – блоки прямого преобразования координат (рисунок 2.5);
– «PKО», «PKО1», – блоки обратного преобразования координат (рисунок 2.6);
– «P-reg PC» – блок, моделирующий П-регулятор скорости (рисунок 2.7, а);
– «I-reg PМ» – блок, моделирующий И-регулятор момента (рисунок 2.7, б);
– «Pi-reg Pрt» – блок, моделирующий ПИ-регулятор потока (рисунок 2.8, в);
– «kdt», «kdm», «kdp», «kdc» – коэффициенты усиления обратных связей по току, моменту, потоку и скорости.

| 
|
а) б)
Рис. 2.5 Модель прямого преобразования координат: а) переход из вращающейся системы в систему двух координат (неподвижную); б) переход из двухфазной системы к трехфазной

| 
|
а) б)
Рис. 2.6 Обратное преобразование координат: а) переход с трехфазной системы в систему двух координат; б) переход во вращающуюся систему
а)

б)

в)
Рис. 2.7 Модели регуляторов: а) П-регулятор скорости; б) И-регулятор момента; в) ПИ-регулятор потока
Моделирование системы на данном этапе осуществлялось при использовании идеальных источников тока (рисунок 2.8). Это упрощение позволяет при существенном сокращении машинного времени расчета модели проверить правильность расчета параметров системы управления.

Рис. 2.8 Модель преобразователя частоты на идеальных источниках тока
На рисунке 2.9 представлены результаты моделирования рассматриваемой системы.

Рис. 2.9 Результаты моделирования векторной системы управления в режиме «пуск – холостой ход – наброс номинальной нагрузки»: а) токи статора двигателя; б) скорость двигателя; в) момент, развиваемый двигателем
Дата добавления: 2019-01-14; просмотров: 361; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!