Отсечение. Алгоритм Кируса Бека отсечения отрезка.

Алгоритм
- D=P2-P1
- tн=0, tв=1
- Цикл по всем граням i=1:N
- Вычисление nвнi
- Di=D*nвнi
- Wi=(P1-fi)*nвнi
- Di=0?
- да. Wi≥0? нет - Конец. да - продолжаем
- нет. t=-Wi/Di; Di>0?
- да. t>1?
- нет. tн=max(tн, t)
- да. Конец
- нет. t<0?
- нет. tв=min(tв, t)
- да. Конец
- tн≤tв? да – нарисовать(P(tн), P(tв))
- Конец
Внутреннее и внешнее отсечение. Определение выпуклости многоугольника; определение нормали; разбиение невыпуклых многоугольников. Триангуляция многоугольников.
Внутреннее отсечение – определяем части отрезка внутри отсекателя и вычерчиваем.
Внешнее отсечение – определяем части вне отсекателя и вычерчиваем.
Определение выпуклости
- Вычислить векторные произведения всех пар смежных сторон.
- Если все = 0 – многоугольник вырожден в отрезок.
- Все разных знаков – многоугольник невыпуклый.
- Все ≥0 – выпуклый, нормали ориентированы влево от рёбер.
- Все ≤0 – выпуклый, нормали вправо.

- Разбиение
- Перенести в (0, 0) i-ую вершину
- Повернуть вокруг (0, 0), чтобы i+1-ая вершина оказалось на +части оси x
- Вычислить знаки ординат всех i+2-ых вершин
- =0 – вырожден в отрезок
- одинаковы – выпуклый относительно этого ребра
- разные – невыпуклый, разрезаем на 2 части вдоль оси. далее работаем с двумя многоугольниками
Определение внутренней нормали 
Отсечение многоугольников. Алгоритм Сазерленда Ходжмена.
Возможные варианты взаимного расположения.
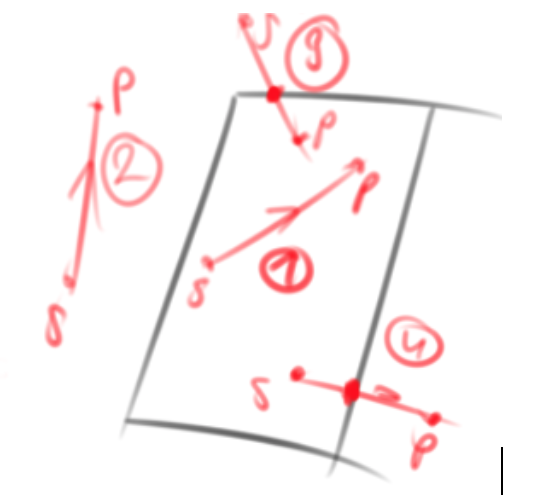
- обе вершины отрезка SP видимы, отрезок целиком видим. В результат заносятся точки S и P
- Обе вершины невидимы, отрезок целиком невидим. В результат заносится 0 точек
- S невидима, P видима, отрезок частично видим. В результат заносится точка пересечения (надо найти) и P.
- Наоборот. S и точка пересечения.
Алгоритм
|
|
|
- определить видимость точки (вершины рёбер)
а) использовать скалярное произведение PjAi(вектор из вершины в точки) * n(внутр нормаль), >=0 точка видима, <0 невидима(как в Кирусе-Беке)
б) использовать пробную функцию (на основе уравнения прямой/совпадающей с ребром многоугольника) F =ax + by + c знак функции для исследуемой функции надо сравнить со знаком пробной функции точки, положение которой известно
в) использование векторного произведения AiPj(из вершины в точку) * AiAi+1(вектор совпадающ с ребром), >=0 точка Pj видима(есди равно точка на границе и она видима) контур обходится по часовой стрелке
- находить точки пересечения(убедиться в ее наличии)
искать точку пересечения ребра многоугольника с прямой == стороной отсекателя(когда видимость концов ребра различная)

В данном алгоритме рассматривается конкретный вариант нахождения: ищется точка пересечения прямой, проходящей через ребро отсекателя, с ребром отсекаемого многоугольника. Поскольку отрезки имеют произвольное расположение, удобно использовать параметрическую форму записи: P(t) = P1 + (P2-P1)t, где 0<=t<=1 – ребро многоугольника, и Q(s) = Q1 + (Q2-Q1)s – ребро отсекателя.(прямая s без ограничений) P(t)=Q(s):  Предварительно нужно убедиться в непараллельности прямых – точка пересечения должна существовать. Это определяется с помощью видимости концов ребра многоугольника – если видимость разная, то точка пересечения есть. Начальная вершина очередного ребра является одновременно и конечной вершиной для предыдущего ребра. Эта вершина анализируется (и заносится в результат если видима) на предыдущем шаге.
Предварительно нужно убедиться в непараллельности прямых – точка пересечения должна существовать. Это определяется с помощью видимости концов ребра многоугольника – если видимость разная, то точка пересечения есть. Начальная вершина очередного ребра является одновременно и конечной вершиной для предыдущего ребра. Эта вершина анализируется (и заносится в результат если видима) на предыдущем шаге.
|
|
|
Данный алгоритм имеет недостаток – можно столкнуться с ситуацией построения «ложных ребер» (I2I3). 
Мы работаем с массивом вершин, вершины обходятся последовательно – ложным будет ребро, которое обходится два раза.
Алгоритм
def sutherland_hodgman(clip, pol, norm):
# дублируем начальную вершину отсекателя в конец
clip.append(clip[0])
s = None
f = None
# цикл по вершинам отсекателя
for i in range(len(clip) - 1):
new = [] # новый массив вершин
for j in range(len(pol)): # цикл по вершинам многоугольника
if j == 0:
f = pol[j]
else:
t = is_intersection([s, pol[j]], [clip[i], clip[i + 1]], norm)
|
|
|
if t:
new.append(t)
s = pol[j]
if is_visiable(s, clip[i], clip[i + 1], norm):
new.append(s)
if len(new) != 0:
t = is_intersection([s, f], [clip[i], clip[i + 1]], norm)
if t:
new.append(t)
pol = copy.deepcopy(new)
if len(pol) == 0:
return False
else:
return QPolygonF(pol)
Дата добавления: 2019-01-14; просмотров: 758; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!