Построение графика зависимости переходного процесса по крену от коэффициента закона управления
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
(Национальный Исследовательский Университет)
кафедра 608
КУРСОВАЯ РАБОТА
по дисциплине «Автоматические системы двухсредных ЛА»
на тему: «Расчет параметров автоматической системы управления
ДСА по крену»
Выполнил: студент группы 6О-413С
Быстров М.Ся.
Проверил: преподаватель кафедры 608
Половинкин В.В.
Москва, 2018г.
СОДЕРЖАНИЕ
• Постановка цели и приведение исходных данных расчетной работы ............. 3
• Расчет динамических коэффициентов дифференциального уравнения
движения аппарата по крену ................................................................................ 4
• Расчет максимально-допустимой угловой скорости циркуляции аппарата в горизонтальной плоскости .......................................................................... 6
• Расчет коэффициента закона управления по крену ...................................... 7
• Построение графика зависимости переходного процесса по крену от коэффициента закона управления ................................................................. 8
• Расчет коэффициента закона управления по крену для заданного значения колебательности μ и значения ....................................................................... 10
• Построение графиков переходных процессов по крену (t) и угловой скорости вокруг продольной оси (t) при различных законах управления .................. 11
7.1. Неуправляемое движение, т.е. ..................................................... 13
7.4. Управляемое движение с законом управления ....................... 15
|
|
|
7.7. Управляемое движение с законом управления.......... 17
7.10. Управляемое движение с законом управления
с учетом ограничения угла отклонения элеронов ≤ ...................... 19
• Формулировка выводов по результатам построенных переходных процессов с различными законами управления ...................................................................... 22
• Список используемой литературы ...................................................................... 23
• Приложение .......................................................................................................... 24
• Постановка цели и приведение исходных данных расчетной работы
Целью данной расчетной работы является освоение упрощенных методов расчета динамических коэффициентов закона управления по крену подводной ступени ДСА и анализ переходных процессов по крену при различных законах управления.
Исходные данные:
| Номер варианта работы | № | 1 |
| Момент инерции апп-та отн-но оси Ох | [ | 5.6 |
| Присоединенный момент инерции апп-та отн-но оси ОХ | [ | 0.18 |
| Вес апп-та | G [кгс] | 1435 |
| Координата центра тяжести относительно системы Оxyz | [м] | -0.007 |
| Площадь миделевого сечения апп-та | S [] | 0.224 |
| Длина апп-та | L [м] | 7.93 |
| Уст. скорость движения апп-та | V [] | 18 |
| Г/д коэфф. м-та от вращения апп-та вокруг оси Ох | -0.00032 | |
| Г/д коэфф. м-та от угла отклонения элеронов | -0.0019 | |
| Г/д коэфф. м-та от вращения апп-та вокруг оси Оу | 0.0028 | |
| Доп. погрешность по крену | Δγ [рад] | 0.0174 |
| Доп. колебательность п.п. | μ | 0.9 |
| Макс. отклонение элеронов | [рад] | 0.262 |
|
|
|
Расчет динамических коэффициентов дифференциального уравнения движения аппарата по крену
В настоящей расчетной работе будем пользоваться этим уравнением движения аппарата вокруг продольной оси:
Автоматическая система управления подводной ступенью ДСА по крену является автоматической системой с обратной связью. Система управления по информации о текущих значениях угла крена и угловой скорости вокруг продольной оси формирует команду на отклонение органов управления — элеронов. По этой команде рулевой привод отклоняет элероны на требуемый угол. Математическая зависимость между значением и значениями называется законом управления:
)
В данной расчетной работе примем рулевой привод безынерционным. Тогда можно считать, что:
и )
Проведем расчет динамических коэффициентов дифференциального уравнения движения через массогабаритные и гидродинамические параметры аппарата:
|
|
|
= = -1,7378
= = -0,7159
= = -9,6485
= = 6,2642 ,
где ρ — плотность морской воды.
Расчет максимально-допустимой угловой скорости циркуляции аппарата в горизонтальной плоскости
Данный расчет выполняется на установившемся циркуляционном участке движения аппарата. При этом аппарат должен двигаться с нулевым креном, т.е. = 0, и момент вокруг продольной оси аппарата от центробежной силы должен компенсироваться максимальным отклонением элеронов, т.е., а также = 0. Таким образом из соотношения между установившимися значениями параметров аппарата для неуправляемого движения будем иметь:
= 0,4035 ]
Расчет коэффициента закона управления по крену
При управлении по крену наиболее распространен закон управления вида:
где, — динамические коэффициенты закона управления.
Общепринято, что положительному значению угла отклонения элеронов соответствует отрицательное значение углового ускорения . В таком случае значения динамических коэффициентов закона управления должны быть положительны: .
Данный расчет коэффициента закона управления по крену ,при котором на максимально-допустимой угловой скорости циркуляции аппарата в горизонтальной плоскости угол крена не превышает допустимую погрешность Δγ, т.е. ≤ Δγ, выполняется с использованием соотношения между установившимися значениями параметров аппарата на циркуляции в горизонтальной плоскости в управляемом движении по крену, который имеет следующий вид:
|
|
|
Подставляя в вышеуказанное выражение вместо значение Δγ, а вместо — значение , будем иметь:
= ─ = 14,8773
Построение графика зависимости переходного процесса по крену от коэффициента закона управления
При построении графика требуемой зависимости воспользуемся следующей формулой, определяющей длительность времени отработки начального рассогласования — длительность переходного процесса:
Т= ln,
где — минимальное по модулю действительное значение корня характеристического уравнения;
— доля от начального рассогласования переменной, после которой переходный процесс можно считать закончившимся.
Входящее в вышеуказанную формулу минимальное по модулю действительное значение корня характеристического уравнения зависит от коэффициента закона управления .
Характеристическое уравнение управляемого движения подводной ступени ДСА по крену имеет корни вида:
Выражение для , полученное из вышеуказанной формулы, существует в двух видах, зависящих от значения : одно для случая двух действительных корней, другое для двух комплексно-сопряженных корней характеристического уравнения. Граница, разделяющая два выражения для , соответствует значению , при котором подкоренное выражение в вышеуказанной формуле обращается в нуль.
 Таким образом график требуемой зависимости будет состоять из двух припасованных частей: одна часть для часть для
Таким образом график требуемой зависимости будет состоять из двух припасованных частей: одна часть для часть для
и примет вид:
Область действительных корней характеристического уравнения
Область комплексно-сопряженных корней характеристического уравнения
6. Расчет коэффициента закона управления по крену для заданного значения колебательности μ и значения
Понятие колебательности переходного процесса применимо только при наличии комплексно-сопряженных корней характеристического уравнения и определяется формулой:
,
где — значение частоты колебаний;
— значения действительной части корня.
Выражения для и получают на основе следующих формул:
=
= .
Далее необходимо подставить выражения и формулу для определения колебательности переходного процесса и получить уравнение с одним неизвестным при этом для удобства расчета приведем уравнение к стандартному виду:
-()-()-(+)=0
После того, как уравнение будет решено, получим два значения корней:
-1,9313 и 1,7829.
Значения динамических коэффициентов закона управления должны быть положительны: (исходя из условия закона управления по крену). Таким образом из двух корней выберем корень: 1,7829.
7. Построение графиков переходных процессов по крену (t) и угловой скорости вокруг продольной оси (t) при различных законах управления
Построение графиков переходных процессов по крену(t) и угловой скорости вокруг продольной оси (t) проводится при начальных условиях (0) = 0.248, (0) = 0.
7.1 Неуправляемое движение, т.е.
 для (t)=0:
для (t)=0:
7.2 Неуправляемое движение, т.е.
 для (t)=:
для (t)=:
7.3 Неуправляемое движение, т.е.
 для (t)=:
для (t)=:
7.4 Управляемое движение с законом управления
 для (t)=0:
для (t)=0:
7.5 Управляемое движение с законом управления
 для (t) =:
для (t) =:
7.6 Управляемое движение с законом управления
 для (t) =:
для (t) =:
7.7 Управляемое движение с законом управления
 для (t) =:
для (t) =:
7.8 Управляемое движение с законом управления
 для (t) =:
для (t) =:
7.9 Управляемое движение с законом управления
 для (t) =:
для (t) =:
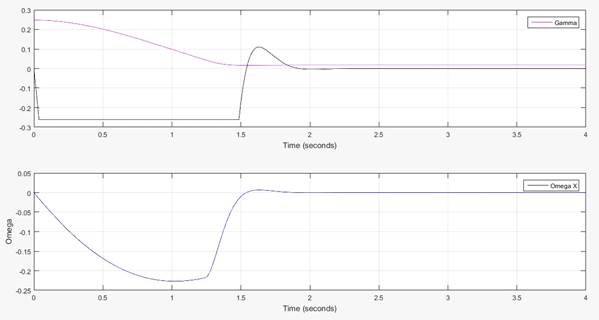
7.10 Управляемое движение с законом управления
с учетом ограничения угла отклонения элеронов ≤
 для (t)=0:
для (t)=0:
7.11 Управляемое движение с законом управления
с учетом ограничения угла отклонения элеронов ≤
для (t)=: 
7.12 Управляемое движение с законом управления
с учетом ограничения угла отклонения элеронов ≤
 для (t)=:
для (t)=:
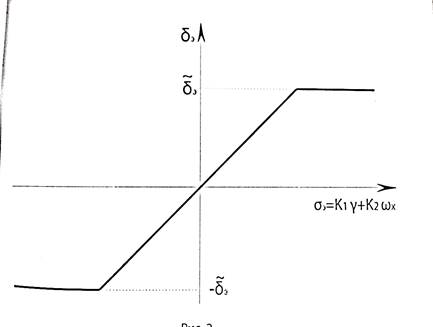
Для построения графиков по пунктам задания 7.10 - 7.12 функция ограничения рулей ≤ приведена ниже:
7.13 Управляемое движение с законом управления
с учетом ограничения угла отклонения элеронов ≤
для (t)=0 (за промежуток времени, равный 4 сек.):

7.14 Управляемое движение с законом управления
с учетом ограничения угла отклонения элеронов ≤
для (t)= (за промежуток времени, равный 4 сек.):
7.15 Управляемое движение с законом управления
с учетом ограничения угла отклонения элеронов ≤
 для (t)= (за промежуток времени, равный 4 сек.):
для (t)= (за промежуток времени, равный 4 сек.):
Дата добавления: 2019-01-14; просмотров: 389; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!