Доплеровский измеритель скорости. Измерение путевой скорости
Для расчета пути, проходимого самолетом за время полета, и для определения расчетного местоположения необходимо знать путевую скорость V П и путевой угол ПУ.
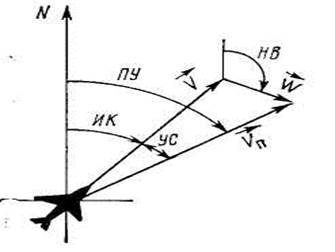
| Рис. 10.6. Навигационный треугольник скоростей: V– истинная воздушная скорость; W– скорость ветра; Vn – путевая скорость; ИК – истинный курс; УС – угол сноса; ПУ – путевой угол; НВ – направление ветра
|
Из навигационного треугольника скоростей (рис.10.6) видно, что вектор путевой скорости V П равен геометрической сумме двух векторов – истинной воздушной скорости V (скорости самолета относительно воздуха) и скорости ветра W (скорости воздуха относительно земли).
Одним из способов вычисления путевой скорости V П является решение навигационного треугольника скоростей, т.е. нахождение одной из его сторон по двум другим. Для этого, очевидно, должны быть известны не только абсолютные значения скоростей V и W , но и угол сноса (УС), равный разности между углом направления ветра (НВ) и истинным курсом самолета (ИК).
Вычисление путевой скорости производится с определенными погрешностями, которые складываются из погрешностей определения ИВС, курса самолета, а также скорости и направления ветра. Наибольшие погрешности получаются при определении параметров ветра, так как его скорость и направление трудно определить в полете. Поэтому целесообразно иметь прибор, непосредственно измеряющий путевую скорость.
|
|
|
Для измерения путевой скорости используются ИУ, в основу измерения которых положен метод, основанный на эффекте Доплера.
Принцип действия основан на зависимости изменения частоты излучаемых и принимаемых радиосигналов от скорости движения источника сигнала относительно приемника.
Эффект Доплера заключается в том, что частота принимаемых колебаний (звуковых или электромагнитных) в случае, если источник колебаний движется относительно приемника, не равна частоте излучаемых колебаний. Частота увеличивается, если скорость источника направлена к приемнику, и уменьшается, если скорость направлена от приемника. Величина изменения частоты пропорциональна скорости сближения источника и приемника колебаний.
|
 |
где V 1 – скорость сближения источника излучения с точкой земной поверхности, от которой отражаются радиоволны; с = 3·108 м/с – скорость света.
|
|
|
Формула (8.47) справедлива для случая, когда радиолуч является достаточно узким. При этом величина V 1 равна проекции вектора путевой скорости на направление радиолуча (луч направлен к земной поверхности под некоторым углом к оси самолета).
|
 |
Чтобы получить приемлемое значение доплеровской частоты, рабочая частота fо должна быть достаточно высокой. Пусть, например, при V 1 =300 м/с необходимо иметь fд = 5·103 Гц. Тогда
что соответствует длине волны 12 см . Таким образом; доплеровские приборы работают в ультракоротковолновом диапазоне радиоволн. Использование радиоволн сантиметрового диапазона практически удобно, так как можно получить узкую диаграмму направленности радиолуча при сравнительно небольших размерах антенн.
 |
Измерение путевой скорости автономными приборами, основанными на эффекте Доплера, осуществляется следующим образом. Радиопередатчик, установленный на самолете, излучает в направлении к земной поверхности узкий остронаправленный луч. Радиопередатчик может работать как в режиме непрерывного излучения, так и в режиме импульсного излучения. В случае непрерывного излучения передача прямого сигнала и прием отраженного сигнала осуществляются раздельными антенными системами. Отраженный сигнал, принятый приемником, поступает на балансный смеситель, на который поступает также сигнал от передатчика (при работе в режиме непрерывного излучения) или специально вырабатываемый стабильный опорный сигнал (при работе в режиме импульсно го излучения). В результате возникают биения частот этих двух сигналов и в системе образуется разностная доплеровская частота, являющаяся мерой путевой скорости самолета.
|
|
|
На рис 10.7 показана ориентировка радиолуча. Проекция луча на плоскость симметрии самолета образует с продольной осью самолета угол γ. Проекции луча и продольной оси самолета на горизонтальную плоскость образуют угол φ.
Составляющая путевой скорости самолета вдоль радиолуча

гдеΨ – угол сноса.
|
 |
Согласно формул 10.1 и 10.2 балансный смеситель выделит доплеровскую частоту
Вращая антенную систему вокруг вертикальной оси до тех пор, пока луч не займет положения, при котором fд = 0, можно определить угол сноса Ψ = 90° – φ, т. е. угол между направлением вектора путевой скорости самолета и проекцией продольной оси самолета на горизонтальную плоскость (рис. 10.8). Устанавливая затем антенную систему в положение, при котором доплеровское изменение частоты максимально, определяют величину путевой скорости из выражения 10.3, при этом угол наклона луча γ считается известным.
|
|
|
 Поскольку угловые размеры луча не могут быть сколь угодно малыми, отраженный от земли радиосигнал содержит некоторый спектр частот, так как углы γ и φ для различных участков облучаемой площадки А (см. рис. 10.7) неодинаковы. Из этого спектра в приборе выделяется средняя частота, которая и определяет путевую скорость._
Поскольку угловые размеры луча не могут быть сколь угодно малыми, отраженный от земли радиосигнал содержит некоторый спектр частот, так как углы γ и φ для различных участков облучаемой площадки А (см. рис. 10.7) неодинаковы. Из этого спектра в приборе выделяется средняя частота, которая и определяет путевую скорость._
 Как видно из формулы 10.3, доплеровская частота зависит от угла наклона луча γ, поэтому крены самолета могут приводить к ошибкам в определении путевой скорости. Для уменьшения этих ошибок антенные системы доплеровского прибора должны быть стабилизированы в пространстве, например, с помощью гироскопических устройств.
Как видно из формулы 10.3, доплеровская частота зависит от угла наклона луча γ, поэтому крены самолета могут приводить к ошибкам в определении путевой скорости. Для уменьшения этих ошибок антенные системы доплеровского прибора должны быть стабилизированы в пространстве, например, с помощью гироскопических устройств.
 Определение вектора путевой скорости методом измерения доплеровской частоты возможно также без вращения антенной системы, если применить двухлучевую систему. В этой системе радиопередатчик излучает два луча, падающих на поверхность земли справа и слева относительно линии пути самолета. Угол сноса и путевая скорость в двухлучевой системе могут быть найдены путем сравнения доплеровского изменения частоты для каждого луча.
Определение вектора путевой скорости методом измерения доплеровской частоты возможно также без вращения антенной системы, если применить двухлучевую систему. В этой системе радиопередатчик излучает два луча, падающих на поверхность земли справа и слева относительно линии пути самолета. Угол сноса и путевая скорость в двухлучевой системе могут быть найдены путем сравнения доплеровского изменения частоты для каждого луча.
Угол сноса я путевая скорость определяются счетно-решающим устройством в соответствии с формулами 
 Применяются также трех- и четырехлучевые системы. В этих системах один или два луча направлены в сторону, противоположную движению самолета. В трехлучевых системах компенсируются ошибки, вызванные вертикальной скоростью самолета, а в четырехлучевых – также и ошибки, вызванные кренами самолета.
Применяются также трех- и четырехлучевые системы. В этих системах один или два луча направлены в сторону, противоположную движению самолета. В трехлучевых системах компенсируются ошибки, вызванные вертикальной скоростью самолета, а в четырехлучевых – также и ошибки, вызванные кренами самолета.








 Приборы измерения высотных и скоростных параметров
Приборы измерения высотных и скоростных параметров
На борту летательных аппаратов применяется группа ИУ, дающих информацию о высотных и скоростных параметрах на основе измерения параметров встречного потока воздуха. В эту группу входят барометрический высотомер, указатели приборной и истинной воздушной скорости, указатель числа М и вариометр (указатель вертикальной скорости).
 В основу строения всех этих ИУ положены косвенные методы измерения. Сущность этих методов заключается в том, что на основе первичной информации о статическом и полном давлениях и о температуре встречного потока воздуха вычисляются величины высотных и скоростных параметров, характеризующие пилотажно-навигационный режим полета.
В основу строения всех этих ИУ положены косвенные методы измерения. Сущность этих методов заключается в том, что на основе первичной информации о статическом и полном давлениях и о температуре встречного потока воздуха вычисляются величины высотных и скоростных параметров, характеризующие пилотажно-навигационный режим полета.
Для того чтобы применить метод косвенных измерений, необходимо знать уравнение данного метода, т. е. функциональную зависимость, связывающую искомые высотно-скоростные параметры с параметрами встречного потока воздуха. Для реализации методов косвенных измерений датчики первичной информации должны взаимодействовать с вычислительным устройством, решающим уравнение метода измерения. В простейшем случае первичные чувствительные элементы совмещают в единой конструкции со счетно-решающим устройством, роль которого часто выполняет передаточно-множительный механизм.
В более сложных случаях, при построении навигационных систем, датчики первичной информации выдают электрические сигналы, поступающие в вычислитель, решающий уравнение метода измерения. Наиболее перспективной является система, в которой первичная информация выдается датчиками в цифровой или частотной форме, а решение уравнений осуществляется специализированной или универсальной БЦВМ.
Дата добавления: 2019-01-14; просмотров: 1361; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!