Переходная матрица состояния и решение уравнения состояния
Решение матричного дифференциального уравнения (1.26), используемое в дальнейшем для исследования динамических характеристик систем, можно получить исходя из свойств матричной показательной функции вида
 (1.30)
(1.30)
получившей название переходной матрицы состояния (в математике - фундаментальной матрицы). Переходная матрица состояния определяется как обратное преобразование Лапласа передаточной функции системы
 (1.31)
(1.31)
Рассмотрим основные свойства функции (1.30):
1)  (1.32 а)
(1.32 а)
2)  (1.32 б)
(1.32 б)
3)  (1.32 в)
(1.32 в)
 для
для  (1.32 г)
(1.32 г)
4)  (1.32 д)
(1.32 д)
5)  (1.32 е)
(1.32 е)
6)  , для любых
, для любых 
 (1.32 ж)
(1.32 ж)
Пусть в некоторый момент времени t = tо на вход системы приложено воздействие u(t), представляющее собой кусочно-непрерывную функцию времени, тогда решение х(t) уравнения (1.26а) можно представить в виде
|
|
|
 (1.33)
(1.33)
где х(t0) - значение переменной состояния в некоторый начальный момент времени t = t0.
В частном случае, если t0 = 0, выражение (1.33) упрощается и принимает вид
 (1.34)
(1.34)
Докажем, что выражение (1.33) является решением уравнения (1.26). Из условия существования и единственности решения следует, что выражение (1.33) должно удовлетворять исходному представлению уравнения (1.26). Это легко показать исходя из свойств (1.32) матричной показательной функции. Дифференцируя обе части выражения (1.33), согласно формуле (1.32 б), с учетом свойства (1.32 а) получим

 (1.35)
(1.35)
исходное уравнение (1.26), что и требовалось доказать. Рассмотрим процедуру нахождения решения х(t) на следующем примере.
Пример 1.6 Требуется найти x(t) для t  0 механической системы примера 1.4 при следующих значениях параметров: М = 1, D = 1, К = О, начальном значении х(0) = [1, 0]
0 механической системы примера 1.4 при следующих значениях параметров: М = 1, D = 1, К = О, начальном значении х(0) = [1, 0]  и u(t) = 1 (t
и u(t) = 1 (t  О). При аналитических вычислениях для нахождения х(t), в случае когда t0=0, проще и удобнее воспользоваться обратным преобразованием Лапласа выражения (2.3а) и представлением (1.34).
О). При аналитических вычислениях для нахождения х(t), в случае когда t0=0, проще и удобнее воспользоваться обратным преобразованием Лапласа выражения (2.3а) и представлением (1.34).
Для определения матричной показательной функции (1.31) вначале вычислим обратную матрицу
|
|
|
 (1.36)
(1.36)
Затем, осуществляя обратное преобразование Лапласа, получим
 (1.37)
(1.37)
Подставляя полученное выражение в формулу (1.34) и вычисляя интеграл свертки, находим решение х(t) в следующем виде:
 (1.38)
(1.38)
Динамические характеристики системы в тактовые моменты времени
Цифровое (микропроцессорное) управление - это управление, при котором данные измерений и сигналы управления, формируемые вычислительной машиной, поступают только в виде дискретных значений с заранее определенным временным интервалом следования. Этот временной интервал Т называется периодом дискретизации (квантования). При этом значение сигнала после аналого-цифрового преобразования и до выхода из вычислительной машины представляется в виде машинного слова - дискретного сигнала, который в двоичной системе кодирует несколькими разрядами значение исходного аналогового сигнала в определенные тактовые моменты времени iT.
В простых регуляторах, таких, как, например, ПИД (пропорционально-интегрально-дифференциальный)-регулятор, период квантования Т определяется затратами времени на аналого-цифровое и цифроаналоговое преобразования сигналов. В тех случаях, когда объем и сложность вычислений по задачам управления возрастают, требуя применения микропроцессора либо вычислительной машины под периодом квантования (дискретизации) обычно понимается время, затрачиваемое на выполнение требуемых вычислений, а затраты времени на аналого-цифровое и цифроаналоговое преобразования либо не учитываются совсем, либо оцениваются приближенно.
|
|
|
 T u[i] u(t) x(t) либо y(t)
T u[i] u(t) x(t) либо y(t)
ЦАП Фиксатор Объект управления
ЦВМ
АЦП T x(t) либо y(t)
x[i] либо y[i]
a)

x(t) либо
T u[i] ЦАП u(t) Объект управления y(t)
Объект управления
|
|
|
Процессор Интерфейс
АЦП Выборка и хранение
 информации
информации
x[i] либо y[i]
T
б)
Рис 1.4 Функциональная схема системы цифрового управления. (а) обобщенная схема системы цифрового управления. (6) Схема цифрового управления с фиксатором (экстраполятором) нулевого порядка. ЦАП - цифроаналоговый прео6разователь; АЦП аналого-цифровой прео6разователь.
С выхода объекта управления через аналого-цифровой преобразователь (АЦП) в вычислительную машину поступает либо сигнал x[t] = х(iT), либо сигнал y[t] = у(iT) с интервалом времени Т. Микропроцессор обрабатывает эти сигналы и вычисляет управляющее воздействие, значения которого через каждый интервал времени т после цифроаналогового преобразования возобновляются в экстраполяторе (фиксаторе). Затем управляющее воздействие передается на объект управления.
Под экстраполятором понимается схема преобразования дискретного сигнала в непрерывный сигнал. Подобный экстраполятор обычно называется фиксатором нулевого порядка, если его выход ной сигнал поддерживается на интервале времени Т постоянным (рис. 1.4 а). В отличие от такого фиксатора в экстраполяторе первого порядка (рис. 1.4 б) осуществляется обобщение дискретных данных на интервале времени т по предыдущей и теку шей выборкам. Очевидно, что в зависимости от типа экстраполятора меняется и дискретная модель объекта управления.
u(t)
u[2] u[2]
u[0] u[0]
u[1] u[1]
 0 T 2T t a) 0 T 2T 3T t
0 T 2T t a) 0 T 2T 3T t
u(t)
u[0]
u[2]
u[1]
0 T 2T 3T t
б)
Рис. 1.5 Характеристики сигналов на входе и выходе экстраполятора нулевого (а) и первого (б) порядков.
На современном уровне развития микропроцессорной технологии наибольшее распространение в практике получил фиксатор нулевого порядка.
В этом случае цифровой сигнал хранится в памяти накопителя (триггерного типа) на протяжении периода Т, и через цифроаналоговый преобразователь непрерывно, в течение времени Т выдается на объект управления постоянный по величине аналоговый сигнал (рис. 1.5 б). Такая организация работы экстраполятора требует периодического, через каждый интервал времени Т обновления содержимого памяти.
Аналого-цифровые преобразователи осуществляют дискретную выборку данных из входного аналогового сигнала и выполняют роль интерфейса между объектом управления и вычислительной машиной (рис. 1.4). Рассмотрим теперь математическую модель в виде уравнения состояния, согласно выражению (1.26), дискретной системы управления аналоговым объектом с учетом использования фиксатора нулевого порядка.
Для этого установим взаимосвязь между сигналами u[i] и х[i] либо y[i], воспользовавшись схемой, где входная часть фиксатора нулевого порядка представляет собой дискретизатор и аналого-цифровой преобразователь, а выходная часть цифроаналоговый преобразователь.
Пусть u[i] - дискретный сигнал, тогда непрерывный, или аналоговый, сигнал u[t], поступающий на объект управления и являющийся выходным сигналом фиксатора нулевого порядка, удовлетворяет соотношению (см. рис. 1.6).
 ,
, 
Обозначим переменную состояния объекта управления и выходную переменную при t = iT через х [i] и у[i] соответственно, причем
 |
 ,
, 
 x(t) либо T
x(t) либо T
u[i] Фиксатор u(t) Объект y(t)
нулевого порядка управления x[i] либо
y[i]
Рис. 1.6 Функциональная схема взаимосвязи дискретных и непрерывных сигналов в системе цифрового управления
 x(t)
x(t)
x[1] x[2]
x[3]
x[0]
u[1] u[2]
u[0]
0 T 2T 3T t
Рис. 1.7 Значения переменных в дискретные моменты времени.
с учетом этого можно записать
 ,
,  (1.39 а)
(1.39 а)
 (1.39 б)
(1.39 б)
где
 ,
,  ,
,  (1.39 в)
(1.39 в)
Решение уравнения состояния по аналогии с выражением (1.33) и с учетом того, что t0 = iT, t = (i + 1) Т, будет иметь вид
 (1.40)
(1.40)
Очевидно, что если на каждом временном интервале интегрирования Тu(t) представляет собой постоянную величину u[i], то, пре образуя переменную интегрирования δ= (i + 1)Т - т, получаем тождественность выражений (1.40) и (1.39 б). При этом выражение (1.39 б) получается в результате прямой дискретизации выражения (1.26 б).
Уравнения (1.39) называются уравнением состояния и уравнением выхода дискретной системы. Эти уравнения определяют динамические характеристики системы в тактовые моменты времени и графически могут быть представлены в виде структурной схемы, где оператор Z  - оператор запаздывания на один такт (период), а матрица А, определяющая переход переменной состояния x[i] в x[i + 1], - матрица перехода состояния.
- оператор запаздывания на один такт (период), а матрица А, определяющая переход переменной состояния x[i] в x[i + 1], - матрица перехода состояния.
Решение уравнения (1.39 б) легко получить из следующей вектор ной рекуррентной формулы:
 (1.41)
(1.41)
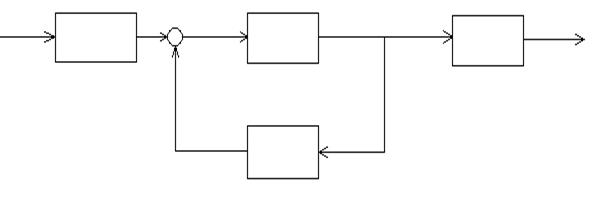 u[i] + x[i+1] x[i] y[i]
u[i] + x[i+1] x[i] y[i]
b z-1In c
+
A
Рис. 1.8 Структурная схема дискретной системы в пространстве состояний
Уравнение (1.39) удобно использовать при моделировании непрерывной системы. В этом случае период квантования Т выбирается достаточно малым, с тем, чтобы на периоде Т входную величину u(t) в выражении (1.26) считать постоянной. Значения х[i] определяются численным методом по рекуррентной формуле (1.41) с помощью соотношений (1.30) и (1.32 в) для определения матричной показательной функции и соответствующих интегралов. Рассмотрим процесс нахождения матриц перехода на конкретном примере.
Пример 1.7 Пусть в системе, приведенной в примере 1.6, используется фиксатор нулевого порядка и дискретизация осуществляется с периодом квантования Т = 1. Требуется найти матрицы коэффициентов А, b, c для дискретной модели.
В примере 1.6 было найдено выражение  в виде
в виде

Учитывая, что  получим
получим

Подставляя t = Т = 1, согласно соотношениям (1.39), будем иметь
 ,
,  ,
, 
Вычислительные методы
Поскольку назначением математической модели является предсказание реакции системы на выбранные входные сигналы, мы должны уметь и оценивать начальные условия для уравнения модели, и решать дифференциальные уравнения.
Опишем методы предсказания и коррекции и Рунге-Кутта для решения дифференциальных уравнений и покажем, каким образом по методу Рунге-Кутта высшего порядка можно получить высокую точность.
Дата добавления: 2018-11-24; просмотров: 143; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!