ФИЗИЧЕСКАЯ КАРТИНА ОБТЕКАНИЯ ПРОФИЛЯ
Вопрос: при вращении НВ по часовой (если смотреть сверху) завал происходит в какую сторону?
Вращение корпуса вертолета противоположно вращению НВ!!!
В аэродинамике вертолета есть такое понятие как азимутальное положение лопасти. За 0 градусов берется положение лопасти над хвостовой балкой (вид сверху) и далее по ходу вращения НВ – 90 – 180 (над кабиной) – 270.
При полете вертолета с поступательной скоростью несложно понять что скорость обтекания лопасти в азимуте 90 больше чем в азимуте 270. Соответственно их и называют – наступающие и отступающие.
В связи с тем, что лопасти закреплены не жестко (шарниры) они имеют маховые движения вверх и вниз. Проходя азимут 90 градусов лопасть создает в этом месте максимальную тягу, проходя азимут 270 – соответственно минимальную. Это объясняет завал конуса вправо.
Теперь, если представить инерцию, – легко понять, что начавшийся взмах с азимута 90 максимальное значение будет иметь уже в районе кабины (по инерции идя на взмах) и соответственно – азимут 270 – 0 – минимальный взмах. Это объясняет завал конуса НВ назад.
Собрав все вышесказанное в кучу становится понятна причина завала конуса НВ на поступательном движении назад и вправо (для отечественных вертолетов с нашим вращением НВ по часовой стрелке – если смотреть сверху).
Вопрос: … не открою тайну о том, что нередки случаи выполнения полётов с превышением максимально допустимой взлетной массы. В связи с этим "слышал" как-то про особые способы взлета путем ввода коррекции во время разгона. Прошу пояснить есть ли такое в практике вообще, и если есть, как и для чего?
|
|
|
По поводу ввода коррекции во время разбега слышал от коллег, работавших в Африке. Но связано это не полётами с превышением максимально-допустимой взлётной массы, а с полётами с площадок в условиях образования пыльного (песчаного вихря).
Разбег начинается на левой коррекции, когда поток от НВ не такой сильный и поднимает гораздо меньше пыли и песка. С ростом скорости вихрь отстаёт, и тогда вводят правую коррекцию и в двигатели поступает чистый воздух без песка и пыли. На посадке наоборот, после касания, пока вихрь не накрыл вертолёт, на пробеге выводят коррекцию.
Аэродинамика вертолета
Вращение винта на месте без поступательной скорости (режим осевого обдува). На рисунке 13 показан простейший двухлопастный винт, у которого лопасти жестко прикреплены к втулке.
Рисунок 13:
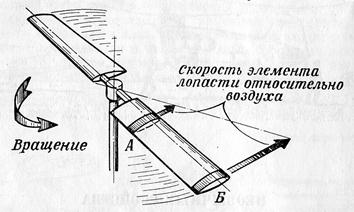
Винт вращается на месте. При этом масса воздуха перемещается вертикально сверху вниз. Это один из режимов так называемого осевого обдува винта. На одной из лопастей выделены два небольших участка: один – «А» – ближе к оси вращения, другой – «Б» – у конца лопасти. В процессе вращения винта оба участка будут описывать концентрические окружности. Понятно, что длина окружности, описываемой элементом «Б», а значит, и его скорость относительно воздуха, будет больше, чем элемента «А». Иными словами, скорость элемента лопасти относительно воздуха зависит от того, на каком расстоянии он расположен от оси вращения. Чем это расстояние больше, тем большую скорость имеет элемент. Понятно, что на оси вращения скорость будет равна нулю, а на конце лопасти она будет наибольшей. С инженерной точки зрения, если винт вращается вокруг своей оси с некоторой угловой скоростью, то линейная скорость V элемента лопасти, расположенного на расстоянии r от оси вращения, может быть найдена по известной формуле механики:
|
|
|
Где:
· V – скорость в м/сек
· r – расстояние в метрах от оси вращения до того участка (сечения) лопасти, скорость которого определяется
· ω – угловая скорость вращения винта.
·
Если известно число оборотов n винта в минуту, то угловая скорость вычисляется по формуле:
По этим формулам можно легко определить скорость любого участка лопасти. Соответствующее этому случаю распределение скоростей набегающего на лопасти потока воздуха показано на рисунке 14:
|
|
|
Выделим на одной из лопастей участок небольшой ширины на расстоянии r от оси вращения, как показано на рисунке 15:
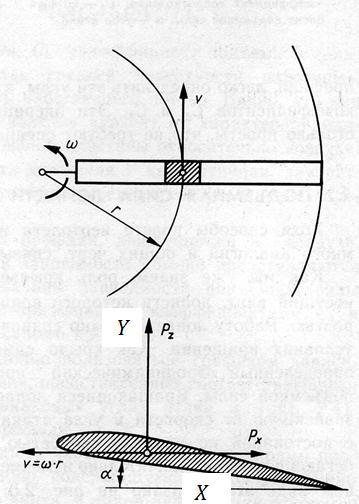
На чертеже этот участок заштрихован. Так как ширина этого участка небольшая, то скорость на нем изменяется незначительно по мере удаления от центра вращения. Поэтому можно принять, что скорость на нем везде одинакова и равна скорости его середины, то есть:
Поперечное сечение лопасти на этом участке имеет вид обтекаемого профиля. При обтекании этого профиля потоком воздуха под углом атаки возникают подъемная сила Y и сила сопротивления X, которые вычисляются по специальным формулам. Разбивая лопасть на множество мелких участков можно определить их подъемные силы и силы сопротивления, и, сложив вместе соответствующие силы по всем участкам, определить подъемную силу и силу лобового сопротивления одной лопасти. (С математической точки зрения такая операция именуется интегрированием по размаху лопасти). Подъемная сила (или сила тяги) всего винта получается умножением подъемной силы одной лопасти на число лопастей. Концевой эффект. Величина силы тяги винта определяется описанным выше методом с некоторой ошибкой, обусловленной несколькими причинами. Одна их них состоит в не учете явления так называемого концевого эффекта. Концевой эффект проявляется в стремлении воздуха к выравниванию давлений над лопастью и под лопастью путем перетекания через края лопасти, как это показано на рисунке 16:
|
|
|
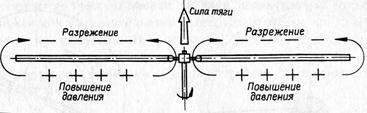
В данном случае перетекание происходит как на внешнем, так и на внутреннем краях лопасти. А так как подъемная сила появляется вследствие разности давлений на верхней и нижней поверхностях лопасти, то любое выравнивание этих давлений вызывает потери подъемной силы. По этой причине как у комля лопасти (в месте крепления), так и на ее конце подъемная сила практически отсутствует. Момент сопротивления вращению винта. Умножая силу лобового сопротивления на плечо ее действия и на число лопастей винта, можно определить момент сопротивления вращению всего винта. Концевой эффект здесь также оказывает влияние на момент сопротивления вращению, увеличивая его. Чтобы вращать винт с заданным числом оборотов, которое обеспечивает необходимую подъемную силу, нужно иметь двигатель, развивающий крутящий момент, равный моменту сопротивления винта. Потребный крутящий момент двигателя можно вычислить по формуле:
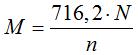
где: M – момент в кгм ; N – мощность на валу двигателя; n – обороты двигателя в об/мин.
Рисунок 17:
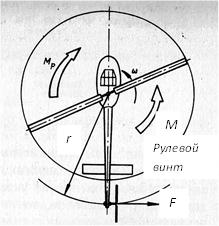
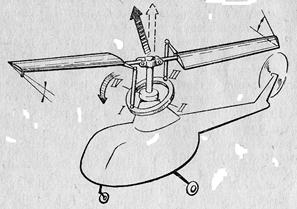
Диаметр несущего винта вертолета достаточно большой, и потому его обороты обычно в 8 – 10 раз меньше оборотов двигателя. Технически это достигается установкой между двигателем и несущим винтом специального механизма. Такой механизм называется редуктором и состоит из системы шестерен, понижающих обороты вала винта. Под действием момента сопротивления несущего винта фюзеляж вертолета стремится повернуться в сторону, противоположную его вращению. Наиболее простой способ противодействия этому нежелательному явлению состоит в применении рулевого винта, расположенного на конце фюзеляжной балки и создающего силу F (рисунок 17). Сила F действует на плече r, создавая момент рулевого винта , направленный противоположно моменту сопротивления несущего винта M. При равенстве этих моментов вертолет не вращается относительно вертикальной оси. Известны и другие способы уравновешивания момента сопротивления несущего винта. Влияние близости земли. Многочисленными исследованиями установлено, что тяга несущего винта вертолета при приближении к земле увеличивается приблизительно на 15 – 20 %. Этот эффект проявляется до высоты примерно равной диаметру несущего винта. Физически это явление объясняется образованием области повышенного давления между несущим винтом и близко расположенной поверхностью земли. Принято говорить, что вертолет в этом случае висит на «воздушной подушке». Работа несущего винта при косом (плоском) обдуве. Рассмотренный в предыдущем разделе случай работы винта вертолета соответствует режимам висения или вертикального подъема. Но от вертолета требуется еще, чтобы он двигался с поступательной скоростью, или совершал горизонтальный полет. Для этого плоскость вращения несущего винта наклоняется вперед, как показано на рисунке 18. (О том, каким образом выполняются такие наклоны, рассказывается ниже).
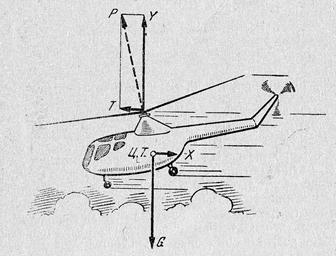
При таком наклоне винт будет не только развивать подъемную силу Y, но и давать силу тяги T, которая заставит вертолет двигаться вперед. В этом случае несущий винт движется поступательно под некоторым углом к оси вращения, и картина его работы существенно изменяется (усложняется). Этот случай соответствует режиму так называемого косого обдува винта. Рассмотреть его в деталях здесь не представляется возможным. Поэтому в целях упрощения рассмотрения происходящего будем считать, что . Это режим косого (плоского) обдува. Он существенно проще для анализа и сохраняет основные особенности косого обдува в общем случае. (Физически режим косого плоского обдува возникает, если плоскость вращения несущего винта не наклоняется, а сила тяги, потребная для горизонтального полета, создается путем установки отдельного тянущего винта самолетного типа).
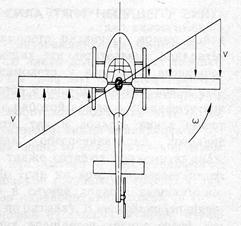
Рисунок 19:
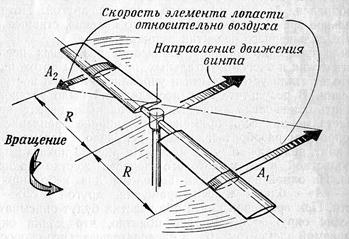
На рисунке 19 показан тот же самый винт, что и на рисунке 13, но теперь он не только вращается, но и перемещается с некоторой скоростью. Рассмотрим скорости двух элементов A1 и A2, расположенных соответственно на первой и второй лопасти. Оба элемента одинаково удалены от оси вращения винта. Скорость элемента A1, расположенного на лопасти, идущей вперед (если смотреть по направлению движения винта), направлена в ту же сторону, что и поступательная скорость винта. Наоборот, скорость элемента A2, расположенного на лопасти, идущей назад, противоположна ей. Следовательно, скорости относительно воздуха у элементов A1 и A2 будут различными. На рисунке 19 показано положение винта, когда лопасти перпендикулярны направлению его движения. В этом случае получается наибольшая разность в скоростях. Проделав несложный расчет, можно убедиться, что эта разница в скоростях получается достаточно большой. Она остается значительной и при иных положениях лопастей, постепенно уменьшаясь и даже исчезая по мере приближения продольной оси лопасти к направлению движения винта. Итак, равноудаленные от оси вращения элементы лопастей при поступательном движении винта движутся относительно воздуха с разными скоростями: по одну сторону винта эти скорости меньше, по другую – больше.
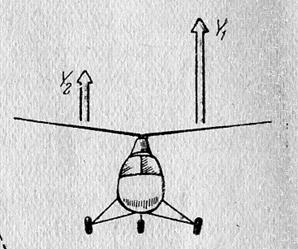
Возникает вопрос, к чему это приводит? Из предыдущего изложения известно, что как подъемная сила Y, так и сила сопротивления лопасти X зависят от квадрата скорости. Следовательно, величины сил, возникающих на лопасти, идущей вперед, будет много больше, чем на лопасти, идущей назад. На рисунке 20 показан горизонтально летящий вертолет с несущим винтом, лопасти которого жестко прикреплены ко втулке. Разница в подъемных силах, создающих разные моменты справа и слева от оси несущего винта вертолета, приведет к тому, что в течение короткого времени такой вертолет опрокинется. Аварии по этой причине часто бывали на первых опытных вертолетах. Такое же явление происходит и при сильных порывах ветра. Достаточно одного сильного порыва, чтобы перевернуть такой несущий винт.
Горизонтальный шарнир и маховые движения лопасти. Чтобы избежать опрокидывания, применяют шарнирную подвеску лопастей. На втулке несущего винта ставится шарнир, как это показано на рисунке 21:
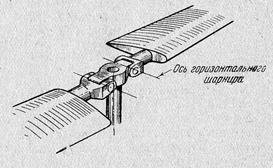
Этот шарнир называется горизонтальным (сокращенно ГШ). Он дает лопасти возможность подниматься или опускаться, вращаясь вокруг него, совершая так называемое, маховое движение, что и предотвращает опрокидывание вертолета. Подробнее картина выглядит следующим образом. У винта с шарнирной подвеской лопасть, идущая против потока, при увеличении подъемной силы делает взмах вверх. Из аэродинамики известно, что при взмахе вверх подъемная сила уменьшается, а при взмахе вниз увеличивается. (подробнее этот вопрос рассматривается ниже). Это позволяет лопасти, идущей против потока и имеющей поэтому большую подъемную силу, уменьшить ее примерно до первоначального значения, которое было на висении. У лопасти, идущей по потоку, подъемная сила уменьшается и потому она делает взмах вниз, увеличивая подъемную силу. Таким образом, лопасти в горизонтальном полете поочередно то поднимаются, то опускаются, совершая маховые движения и тем самым, выравнивая подъемную силу на правой и на левой половинах несущего винта. Максимальный угол взмаха на лопастях не превышает 10 – 15°.
Равновесие лопасти. При вращении винта на каждую лопасть в вертикальной плоскости помимо подъемной действуют еще сила веса и центробежная сила. На работающем винте, на режиме висения лопасть находится в равновесии под действием этих сил, как показано на рисунке 22:
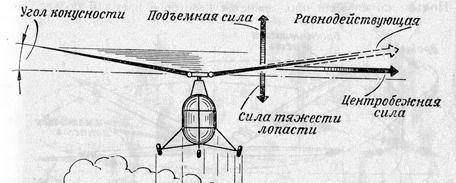
На других режимах равновесие лопасти обеспечивается более сложной системой сил, которая здесь не рассматривается. Следует отметить, что при оборотах винта, достаточных для удержания вертолета в воздухе центробежная сила во много раз больше, чем сила подъемная. В результате этого лопасти несущего винта не закидываются вверх, а лишь отклоняются на небольшой угол от оси вращения, который называется углом конусности. Этот угол также показан на рисунке 22. Обычно величина этого угла находится в пределах 4 – 10?. При вращении винта лопасти описывают некоторую коническую поверхность, которая называется конусом вращения. Конус вращения несущего винта в полете направлен всегда вверх, и только в момент запуска двигателя на земле он направлен вниз, как показано на рисунке 23:
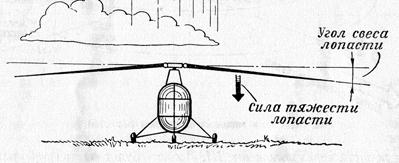
Угол наклона лопасти по отношению к плоскости вращения несущего винта при стоянке вертолета на земле называется углом свеса.
Шарнирное крепление лопастей. Выше уже отмечалось, что не только подъемные, но и силы сопротивления на лопастях, идущих по и против потока сильно различаются. Помимо этого в соответствии с законами механики маховые движения вращающейся лопасти приводят к появлению в плоскости ее вращения сил, стремящихся в зависимости от направления махового движения лопасти (вверх или вниз) ускорить или замедлить вращение лопасти, так называемых, кориолисовых сил. Они вместе с силами сопротивления вызывают колебательные движения лопасти в плоскости ее вращения. При этом возникает большой изгибающий момент, действующий на лопасть в этой же плоскости. Для разгрузки лопасти от этого момента вводится вертикальный шарнир (сокращено ВШ). Помимо этого для обеспечения возможности изменения угла установки лопасти в процессе управления вертолетом требуется еще осевой шарнир. В итоге простейшая реальная схема шарнирного крепления лопасти несущего винта выглядит примерно так, как показано на рисунке 24:
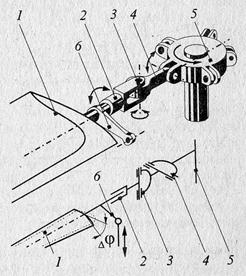
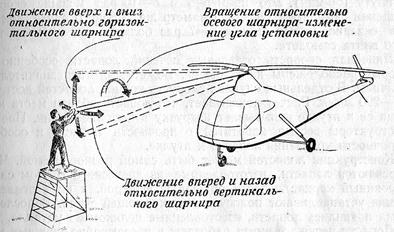
Шарнирное крепление лопастей. Выше уже отмечалось, что не только подъемные, но и силы сопротивления на лопастях, идущих по и против потока сильно различаются. Помимо этого в соответствии с законами механики маховые движения вращающейся лопасти приводят к появлению в плоскости ее вращения сил, стремящихся в зависимости от направления махового движения лопасти (вверх или вниз) ускорить или замедлить вращение лопасти, так называемых, кориолисовых сил. Они вместе с силами сопротивления вызывают колебательные движения лопасти в плоскости ее вращения. При этом возникает большой изгибающий момент, действующий на лопасть в этой же плоскости. Для разгрузки лопасти от этого момента вводится вертикальный шарнир (сокращено ВШ). Помимо этого для обеспечения возможности изменения угла установки лопасти в процессе управления вертолетом требуется еще осевой шарнир. В итоге простейшая реальная схема шарнирного крепления лопасти несущего винта выглядит примерно так, как показано на рисунке 24. На этой схеме лопасть 1 несущего винта крепится ко втулке 5 при помощи шарниров: осевого шарнира (ОШ) 2 , за счет которого с помощью рычага изменения шага лопасти 6 можно изменять угол ее установки , вертикального (ВШ) 3 и горизонтального (ГШ) 4 шарниров. Таким образом, при нейтральном положении рычагов управления при поступательном перемещении вертолета лопасть совершает достаточно сложное движение: вращается, взмахивает вверх-вниз, отстает или опережает свое радиальное положение. Все это обеспечивается рассмотренной системой шарниров. В этом заключается основное отличие несущего винта от обычного, к примеру, самолетного. Если взяться за конец одной из лопастей винта вертолета, то ее можно вращать, перемещать вверх и вниз, назад и вперед (т.е. в вертикальной и горизонтальной плоскости) на вполне определенные углы, величину которых определяют специально установленные ограничители. Схематически этот процесс показан на рисунке 25:
Завал конуса вращения несущего винта. На рисунке 26 показан несущий винт, вращающийся по часовой стрелке и перемещающийся вместе с вертолетом.
Рисунок 26:
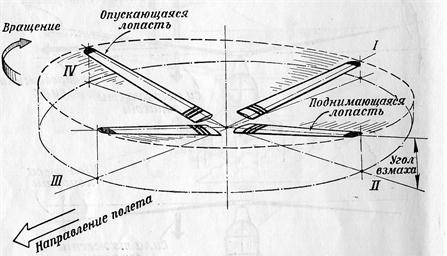
Пунктиром обозначена окружность, описываемая концом лопасти, а штрих-пунктиром – проекция этой окружности на горизонтальную плоскость. В положении 1 лопасть слегка приподнята над горизонтальной плоскостью в соответствии с тем, как это объяснялось по рисунку 22. Перемещаясь из положения 1 в положение 2, лопасть попадает в зону больших скоростей, так как здесь направление вращения лопасти совпадает с направлением полета вертолета. Рост скорости вызовет рост подъемной силы. Лопасть начнет подниматься, совершая маховое движение вверх. При дальнейшем движении от положения 2 к положению 3 лопасть по инерции продолжает подниматься, несмотря на то, что начиная с положения 2 скорость ее относительно воздуха уменьшается. Подъем по инерции продолжается некоторое время и после прохождения лопасти через положение 3. Лопасть будет иметь наибольший угол подъема (или как его принято называть угол взмаха лопасти) где-то между 3 и 4 положениями. Далее лопасть попадает в зону малых скоростей и, следовательно, ее подъемная сила резко уменьшится. Под действием силы тяжести и центробежной силы лопасть начнет опускаться (делать взмах вниз). Спустя некоторое время она вернется в первоначальное положение и все повторится сначала. Таким образом, одному обороту лопасти вокруг оси вращения винта соответствует одно ее маховое движение. Из изложенного следует, что при поступательном движении вертолета конус вращения конус вращения несущего винта наклоняется назад и вместе с тем по направлению вращения винта. Явление называется завалом конуса вращения несущего винта. При висении, вертикальном подъеме или спуске завал конуса не возникает, так как маховых движений лопасти не совершают.
Выравнивание подъемной силы лопасти при маховых движениях. На рисунке 27 показано некоторое сечение лопасти, совершающей маховое движение и проходящей последовательно положения 1,2,3,4, как это уже было показано ранее на рисунке 26.
Рисунок 27:
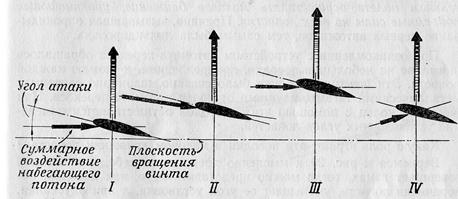
Жирной стрелкой показана скорость воздушного потока, набегающего на лопасть. В любой момент времени эта скорость получается путем сложения скоростей вращения и махового движения. Поэтому ее направление при переходе лопасти от одного положения к другому изменяется так, как показано на рисунке 27. Соответственно этому изменяется и угол атаки сечения лопасти, следовательно, и подъемная сила. Из рисунка 27 видно, что там, где лопасть поднимается, угол атаки ее, а значит и подъемная сила уменьшается. При опускании же лопасти угол атаки возрастает, соответственно подъемная сила растет. Таким образом, маховое движение как бы автоматически уравнивает величину подъемной силы. В тех местах, где подъемная сила начинает увеличиваться за счет увеличения скорости, она одновременно и соответственно уменьшается за счет уменьшения угла атаки.
Автомат перекоса несущего винта. Ранее, на рисунке 24, была показана схема шарнирного крепления лопастей вертолета. Однако там ничего не было сказано о том, как и для чего осуществляется воздействие на рычаг 6 изменения шага лопасти. С этим рычагом связан важнейший механизм системы управления вертолетом, который называется автоматом перекоса несущего винта, общая схема которого показана на рисунке 28:
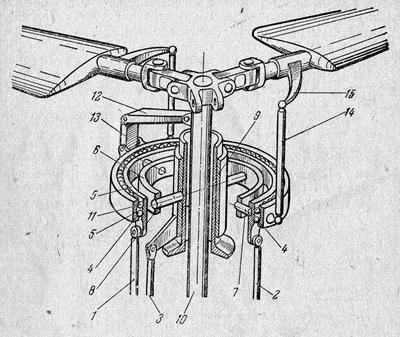
Этот замечательный автомат, который является важнейшим агрегатом каждого вертолета, изобрел в 1911 году пионер отечественного вертолетостроения, в последующем академик Борис Николаевич Юрьев. В то время он был студентом и работал под руководством Н. Е. Жуковского в Воздухоплавательном кружке Московского технического училища (впоследствии МВТУ им. Баумана). В практически неизменном виде этот автомат применяется и в настоящее время в мировом вертолетостроении. Схема автомата следующая. На вращающемся валу 10 несущего винта имеется ползун 9, который не вращается, но может двигаться вверх и вниз. На ползуне с помощью универсального шарнира 15 с осями 7 и 8 подвешено кольцо 5. Через шарики 11 не вращающееся кольцо 5 связано с вращающимся кольцом 4, т.е. кольцо 5, шарики 11 и кольцо 4 образуют шарикоподшипник. Кольцо 4 с помощью шлиц-шарнира (рычаги 12 и 13) соединено с валом несущего винта и вращается с такими же, как и он оборотами. Через тяги 14 вращающееся кольцо соединено с поводками 6 осевых шарниров лопастей. Если двигать ползун 9 вверх, то лопасти будут увеличивать угол установки, а при движении ползуна вниз уменьшать его. Таким образом можно изменять тягу несущего винта по величине. Ранее, на рисунке 18, было показано, что для создания поступательного движения вертолета необходимо наклонять конус вращения несущего винта. Это также достигается с помощью автомата перекоса следующим образом. Для того чтобы перейти в горизонтальный полет, с помощью тяги 1 поворачивают кольцо 5 вокруг оси 7. При этом, как это видно из рисунка 29, лопасть при своем вращении будет все время менять свой угол установки, так как поводок 14 при отклонении кольца 4 будет то подниматься, то опускаться.
Самый меньший угол установки будет, когда поводок придет в точку 1, а самый большой, когда он придет в точку 3. Вследствие вращения винта описанный процесс будет повторяться циклически. В результате такого циклического изменения углов установки лопастей конус вращения несущего винта наклонится в ту же сторону, что и кольцо 5, что вызовет поступательное движение вертолета в соответствующем направлении. (Строго говоря, это не совсем так, потому, что рассмотренные циклические изменения углов установки будут вызывать соответствующие циклические маховые движения лопастей, что в сочетании с инертностью лопастей приводит к несколько иному отклонению конуса вращения. Это хорошо известно инженерам-проектировщикам и учитывается в конструкции автомата перекоса, но сути дела это не меняет.
Теория аэродинамики
Аэродинамика – это наука, изучающая законы движения газообразной среды (например, воздуха) и ее взаимодействие с движущимися в ней обтекаемыми твердыми телами. Различают аэродинамику теоретическую, экспериментальную, прикладную или практическую, промышленную. В настоящем пособии мы будем пользоваться понятиями, главным образом, экспериментальной и прикладной аэродинамики.
ОБТЕКАНИЕ ПРОФИЛЯ
В аэродинамике профилем называют сечение крыла (лопасти вертолета) плоскостью, перпендикулярной размаху и одновременно параллельной направлению набегающего потока воздуха. Это сечение может иметь разные, но всегда хорошо обтекаемые формы.
Рисунок 1: Пример профиля

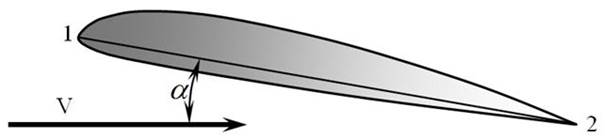
Хорда профиля – это расстояние от носка до хвостика профиля. На рисунке ниже - это длина отрезка 1– 2. Обычно обозначается латинской буквой b.
Угол атаки – это угол между хордой (b) и направлением скорости набегающего потока (V). Обычно обозначается греческой буквой a, показан на рисунке 2:
Рисунок 2:
ФИЗИЧЕСКАЯ КАРТИНА ОБТЕКАНИЯ ПРОФИЛЯ
Возникновение аэродинамической силы. Изображение траекторий движения частичек воздуха вокруг профиля называется спектром обтекания. На рисунке 3 отображен спектр обтекания профиля при малом угле атаки.
Рисунок 3:
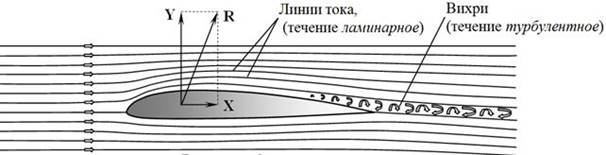
Струи воздуха, двигавшиеся вдали от профиля прямолинейно и с одинаковой скоростью, перед профилем разделяются и набегают на верхнюю и нижнюю поверхности так, что вблизи профиля как сверху, так и снизу поток сужается. В соответствии с уравнением неразрывности скорость воздуха при сужении струи увеличивается, следовательно, статическое давление в ней (по закону Бернулли) падает. Поскольку сверху профиль имеет большую кривизну, сужение струй сверху больше, чем снизу. По этой причине падение давления над профилем больше, чем под ним. Сюда же следует добавить влияние центробежных сил, особенно в районе носка профиля, где его кривизна наибольшая. Вследствие такой разности давлений возникает аэродинамическая сила R. Ее составляющая Y, перпендикулярная скорости набегающего потока, называется подъемной силой, а составляющая X, направленная по скорости набегающего потока, называется силой лобового сопротивления. (Следует отметить, что описанная здесь картина возникновения аэродинамической силы является весьма упрощенной, приближенно передающей суть происходящего). Теоретически и экспериментально установлено, что сила R (а значит и ее составляющие Y и X) пропорциональны квадрату скорости набегающего потока.
Необходимо также обратить внимание на относительно небольшой вихревой след, образующийся позади обтекаемого профиля. Этот след возникает как из-за вязкости воздуха, обуславливающей трение, так и вследствие иных причин, которые здесь не рассматриваются.
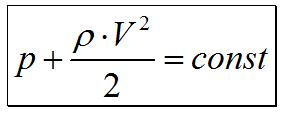
ЗАКОН БЕРНУЛЛИ
В самом общем виде уравнение Бернулли получается на основании закона сохранения энергии для струи сжимаемого газа и имеет относительно сложный вид, который здесь не приводится. В самом простом случае для идеального (что означает отсутствие вязкости) и несжимаемого (что означает малые скорости, не превышающие 0,4 от скорости звука) газа (а значит и жидкости) уравнение Бернулли имеет вид:
где:
· p – статическое давление
·  – динамическое давление или скоростной напор
– динамическое давление или скоростной напор
В представленной выше формуле закон Бернулли гласит, что для идеального несжимаемого газа (или идеальной жидкости) сумма статического давления и скоростного напора в струе есть величина постоянная. Как видно из формулы, при увеличении скорости V давление в струе р падает и наоборот.
Закон открыт членом Российской академии наук Даниилом Бернулли в 1738 году.
ПОДЬЕМНАЯ СИЛА
Для рассмотрения подъемной силы необходимо рассмотреть работу лопасти. Профиль лопасти напоминает форму крыла самолета. Профиль бывает симметричный и асимметричный. На вертолете установлен асимметричный профиль. Во время движения лопасти поток разделяется, обтекая ее профиль снизу и сверху. Поток воздуха сверху проходит больший путь, чем поток снизу. В результате этого над лопастью возникает зона разрежения, а под лопастью – избыток давления.Из-за разности давления возникает подъемная сила, величина которой в основном зависит от скорости набегания воздушного потока и угла установки лопасти (в авиации его называют шагом) относительно набегающего потока. Чем больше шаг и скорость вращения лопасти, тем больше подъемная сила.
СИЛА ВЕСА
Сила веса - это переменная величина, которая состоит из веса вертолета, веса заправленного топлива и веса пилота, пассажиров и багажа.
СИЛА ТЯГИ
Сила тяги подобно лифту тянет вертолет и зависит от несущего винта. Сила тяги направлена перпендикулярно плоскости вращения винта. С помощью автомата перекоса можно управлять наклоном плоскости вращения в разные стороны, в результате чего вертолет перемещается в соответствующую сторону.
СИЛА СОПРОТИВЛЕНИЯ
Сила сопротивления всегда направлена в обратную сторону силе тяги, и чем больше сила тяги, тем больше сопротивление.
ВИСЕНИЕ
Висение самый необходимый элемент полета. С висения начинается любой полет, висением он и заканчивается. Для выполнения висения на вертолете необходимо увеличить подъемную силу и поднять вертолет в воздух на необходимую высоту над землей. Когда вы достигли нужной высоты вам необходимо уравновесить силы, действующие на вертолет. На различных этапах полета вертолет имеет различный угол наклона вокруг поперечной оси, называемый тангажом, что приводит к движению вертолета в ту или иную сторону. Также необходимо знать, что при выполнении вертикального отрыва, висения, разгона скорости (до скорости16-24 узлов), торможения и посадки на вертолет воздействует эффект земли (в авиации называется эффект воздушной подушки). Действие воздушной подушки до высоты диаметра несущего винта (на R-44 равен 10 м). Воздушная подушка помогает вертолету висеть у земли и уменьшает потребную тягу. В отсутствии же воздушной подушки вертолет менее устойчив и у него увеличивается потребная тяга. При увеличении угла атаки сужение струй у профиля увеличивается, что приводит к росту разности давлений над и под профилем, следовательно, росту силы R и ее составляющих Y и X. Помимо этого рост силы R происходит по причине отталкивания вниз масс воздуха, проходящих под нижней поверхностью профиля. Изменение спектра обтекания, в частности, увеличение вихревого следа, также способствует росту силы R.
Рисунок 4:
На рисунке 4 пунктирная кривая условно разделяет области ламинарного (плавного, безвихревого) и турбулентного (срывного, вихревого) обтекания профиля. Существует некоторое значение угла атаки, при котором подъемная сила Y достигает своего максимума. При этом на передней части профиля все еще сохраняется плавное обтекание, обеспечивающее поддержание несущих свойств профиля. Спектр обтекания показан на рисунке 5.
Рисунок 5:
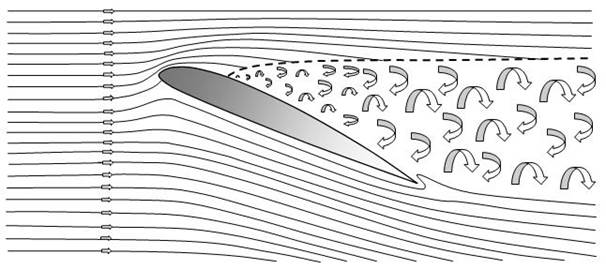
Соответствующий этому угол атаки называется критическим углом. Спектры обтекания, показанные на рисунках выше, называются безотрывными, хотя такое название является относительным ввиду наличия значительного вихревого следа, особенно по мере приближения к критическому значению угла атаки профиля. Фактически рассмотренные спектры являются частично безотрывными. Дальнейшее увеличение угла атаки приводит к полному срыву обтекания. Спектр показан на рисунке 6.
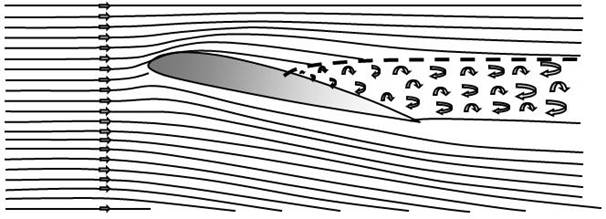
Рисунок 6:
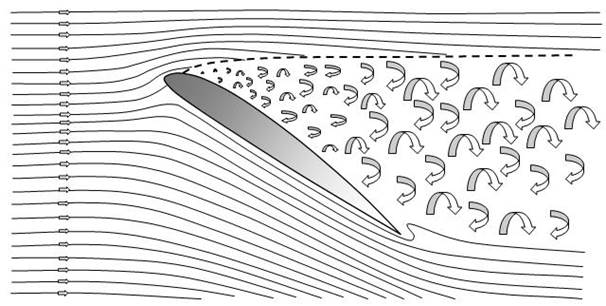
Режим полного срыва характеризуется падением подъемной силы Y и ростом лобового сопротивления X. Область плавного обтекания над верхней поверхностью профиля практически отсутствует. Профиль теряет несущие свойства. Некоторый остаток несущих свойств сохраняется только за счет отталкивания вниз масс воздуха, проходящих под нижней поверхностью профиля. Обтекание воздухом профилей и иных тел при различных скоростях экспериментально наблюдаются и изучаются в так называемых аэродинамических трубах.
Дата добавления: 2018-11-24; просмотров: 927; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!