Дискретность перемещений (величина минимального шага)
Некоторые типы электроприводов
Шаговый электропривод
Определения
Шаговый электропривод – это электропривод, в котором источником механической энергии служит шаговый электродвигатель.
Шаговый электродвигатель (далее – шаговый двигатель, ШД) – это синхронный бесщеточный электродвигатель, в котором импульс тока, подаваемый в одну или несколько обмоток статора, вызывает перемещение ротора на фиксированный угол или фиксированное расстояние (шаг).
Шаговым называют равномерно-прерывистое движение.
9.1.2. Основные элементы шагового двигателя:
- синхронная бесконтактная машина, питание обмоток которой осуществляется прямоугольными импульсами напряжения;
- электронный коммутатор, переключающий обмотки ШД в требуемой последовательности и с требуемой частотой.
Некоторые особенности шагового электропривода
9.1.3.1. Особенности:
- бесконтактные (их можно отнести к классу бесколлекторных двигателей постоянного тока);
- классические шаговые двигатели не содержат датчиков обратной связи.
Отличие шагового двигателя от классического синхронного двигателя
1) На обмотки статора подаются прямоугольные импульсы напряжения, а не синусоидальное напряжение.
В результате ориентация вектора магнитного потока в пространстве между полюсами статора изменяется дискретно (шагами).
2) Катушки статора выполняются зубцовыми, а не распределенными.
|
|
|
Зубцовыми называют катушки, каждая из которых устанавливается на отдельный зубец статора.
3) Как и движение ротора, магнитное поле ШД перемещается не непрерывно, а дискретно, шагами.
Типы электрических машин, используемых в составе шаговых электроприводов
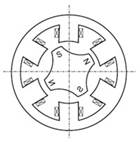
В качестве основных в составе шаговых электроприводов используются электрические машины трех типов (рис.9.1 [12]):
1) классическая синхронная машина с постоянными магнитами на роторе (СМПМ) (рис. 9.1,а);
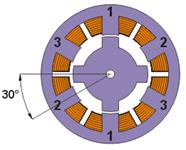
2) синхронно-реактивные машины (двигатели с переменным магнитным сопротивлением) (СРМ) (рис. 9.1,б);
3) индукторные машины для шаговых двигателей (гибридные, объединяющие признаки первого и второго типов ЭМ) (ИМШ) (рис. 9.1,в).
 а)
а)
|  б)
б)
|  в)
в)
|
Рис. 9.1. Эскизы конструкций типовых шаговых двигателей: СМПМ (а) [6], СРМ (б), ИМШ (в)
В СРМ на роторе отсутствуют обмотки и постоянные магниты (пассивный ротор). Ротор выполняется из магнитно-мягкого материала и имеет явно выраженную зубчатость.
Магнитно-мягкие материалы – это материалы с большой магнитной проницаемостью и малой коэрцитивной силой, быстро намагничиваются и быстро теряют магнитные свойства при снятии магнитного поля. Основной магнитно-мягкий материал – сталь.
|
|
|
В СМПМ и ИМШ на роторе располагаются магниты (в ИМШ – кольцевые). Такой ротор называют активным. Постоянные магниты на роторе позволяют получать больший вращающий момент и обеспечивают фиксацию положения ротора при обесточенных обмотках [7].
Наибольшее применение нашел шаговый электропривод на базе СМПМ.
В последнее время появились также ШД с гибким ротором (волновые ШД).
Наряду с машинами вращательного движения существуют и линейные шаговые синхронные двигатели (преобразуют импульсную команду непосредственно в линейное перемещение).
Принцип действия ШД
Принцип действия рассмотрим на примере ШД на базе СМПМ (рис. 9.1а).
Магниты ротора, как правило, намагничены радиально (ротор в виде "звездочки").
Статор ШД имеет явно выраженные зубцы (особенность шагового двигателя), на которых располагаются катушки обмотки статора.
Число фаз обмотки статора, как правило: 2, 3 или 4.
При подаче на те или иные фазы обмотки статора постоянного напряжения (импульса) определенным образом ориентируется вектор МДС статора. При взаимодействии потока возбуждения и потока, создаваемого током (МДС) статора, возникает вращающий момент, стремящийся, преодолевая момент нагрузки, повернуть ротор в положение, при котором:
|
|
|
- вектор потока возбуждения совпадет с вектором МДС статора, т.е. ось полюсов совпадет с осью возбужденного зубца статора (если у двигателя есть ОВ или магниты);
- возбужденные катушки будут иметь максимальное потокосцепление.
При подаче импульса напряжения на другую обмотку статора ориентация магнитного потока статора дискретно меняется. Это вызывает новый поворот ротора на соответствующий угол, называемый шагом ротора (рис.9.2, [13]) [7].

| 
|
| Рис. 9.2. Картина магнитного поля при повороте ротора ШД | |
Мощности
От 10-5 Вт до 4 кВт [1].
Частота вращения
От 1 об/сутки до 5000 об/сек [1].
Частота вращения двигателя зависит от частоты переключений электронного коммутатора.
Дискретность перемещений (величина минимального шага)
Механический шаг поворота ротора (без использования режима ШИМ):
ΔQРм =360 /(p m N1 N2 ), (11.1)
где p – число полюсов на роторе; m – число фаз на статоре; N1- число направлений тока в фазах, возможных при выбранном алгоритме управления (N1=1 или 2); N2 – максимальное число фаз, запитываемых от источника одновременно (N2 = 1 или N2 = 2).
|
|
|
 Рис. 9.3. Пояснение видов коммутации для двухфазной машины
Рис. 9.3. Пояснение видов коммутации для двухфазной машины
| При N2 = 2 полюс ротора занимает положение не только по оси зубца статора (когда ток подается на катушку этого зубца), но и между двумя возбужденными зубцами статора (когда ток подается на две соседние катушки) (рис. 9.3, [6]). Этот режим управления называется полушаговым. Он позволяет удвоить количество шагов на оборот без изменения конструкции двигателя. |
Тем не менее, только за счет повышения числа фаз и полюсов получить малый углы поворота ротора в шаговом двигателе затруднительно.
Существенное уменьшение шага поворота ротора возможно двумя способами:
- за счет применения гребенчатой зоны;
- в микрошаговом режиме при ШИМ.
 Рис. 9.4. ШД с гребенчатой зоной
Рис. 9.4. ШД с гребенчатой зоной
| В синхронно-реактивных ШД и индукторных ШД число зубцов на роторе, эквивалентных числу пар полюсов p, можно выбрать большим, получив при этом малый шаг поворота. Для получения малых шагов в этих машинах применяют гребенчатую зону, когда каждый зубец статора имеет несколько элементарных зубчиков (рис. 9.4). В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с шагом 1,8° (200 шаг/об) или 0,9° (400 шаг/об). |
При микрошаговом режиме в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону синуса в одной фазе и косинуса во второй. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами. Количество таких положений задается настройками драйвера [18].
В микрошаговом режиме, который достигается в режиме ШИМ, можно получить разрешающую способность в 51200 шаг/об (менее 30 угловых секунд) [7].
В результате обеспечивается: более точное позиционирование, меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты.
Достоинства
1) Как и любые бесконтактные двигатели, ШД имеют высокую надежность и большой срок службы.
2) Двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны) и сравнительно высокий момент при низких скоростях вращения.
3) Возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора (редуцирование частоты вращения)
4) Возможность точного фиксирования положения ротора (позиционирования) и регулировки скорости без датчика обратной связи.
Хорошие шаговые двигатели имеют точность позиционирования 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу [12].
Без датчиков обратной связи система значительно упрощается и удешевляется (датчики могут стоить намного больше самого двигателя). Однако, бездатчиковой системе присущи и недостатки.
5) Шаговый двигатель не может сгореть при нагрузке, превышающей максимальный вращающий момент двигателя (при такой нагрузке двигатель будет просто пропускать шаги).
6) Безопасен. В случае любой поломки происходит автоматическая остановка двигателя.
7) Низкая цена, в среднем в 1,5 – 2 раза дешевле сервоприводов.
8) Совместимость с цифровыми устройствами управления, в том числе промышленными контроллерами, а также персональным компьютером.
Недостатки
1) Низкая эффективность. Двигатель потребляет много энергии независимо от нагрузки [14].
2) Отсутствие обратной связи для контроля шагов [14].
3) ШД не может резко стартовать на высокой скорости (требуется плавный разгон) [14].
4) Крутящий момент резко снижается при увеличении частоты вращения (крутящий момент обратно пропорционален скорости) [14].
5) ШД не может моментально продолжить работу после перегрузки на валу [14].
6) Шумный на средних и высоких скоростях [14].
7) Шаговым двигателям присуще явление резонанса.
Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя
8) Возможность «проскальзывания» ротора [10].
Это может произойти при превышении нагрузки на валу, при неверной настройке управляющей программы (например, ускорение старта или торможения не адекватно перемещаемой массе), при приближении скорости вращения к резонансной [10].
Чтобы избежать проскальзывания ротора, как один из способов, можно увеличить мощность двигателя
Основные области применения
В целом ШД применяются в устройствах, требующих высокой точности позиционирования [6].
Можно выделить следующие области применения:
- привод машин и механизмов, работающих в старт-стопном режиме [7];
- в приводах непрерывного движения, где управляющее воздействие задается последовательностью электрических импульсов, например, в станках с числовым программным управлением [7];
- в принтерах и другой компьютерной технике;
- электронные часы, приборы времени - простейшие однофазные ШД с минимальным потреблением электроэнергии;
- датчики поворота (принцип основан на возникновении ЭДС на обмотках при вращении ротора).
Вентильные двигатели
Дата добавления: 2018-11-24; просмотров: 1067; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!