Задания к лабораторной работе
1. Выведите расчетную формулу определяющую параметр дискретности робота для каждой оси, в зависимости (далее по вариантам) от шага винта или коэффициента передачи редуктора. (см. лабораторную работу 8).
2. Определит дискретность перемещения осей робота при помощи оболочки управления роботом на ЭВМ. (по вариантам).
3. Ответьте на контрольные вопросы.
Контрольные вопросы
4. Какие типы электроприводов применяются в промышленных роботах?
5. Как классифицируются приводы роботов?
6. Почему двигатели называются шаговыми?
7. Какие типы электродвигателей вам известны.
8. В чем достоинства и недостатки шаговых двигателей?
9. В чем особенность гибридных двигателей?
10. Дайте определение дискретности перемещения робота?
11. Какова дискретность перемещения данного робота?
12. Ходовой винт с каким шагом установлен в линейных приводах робота?
Лабораторная работа №10
Транспортировка деталей
Цель работы– приобретение практических навыков управления роботом и написания программы для транспортировки деталей со склада на стеллаж.
Содержание работы:
1.Создание последовательности действий робота.
2.Определение координат положений робота при транспортировке.
3.Написание рабочей программы для сборки заданного узла.
Порядок выполнения работы:
1.Получить индивидуальное задание
2.Ознакомиться с методикой выполнения работы
3.Определить координаты положений робота при взятии деталей сосклада.
4.Определить координаты конечного положения деталей
5.Заполнить таблицу координат управляющей программы
6.Написать текст управляющей программы
7.Сделать выводы о приобретенных навыках
Получение задания
На рис.1 изображен вид сверху стенда с роботом. Цифрами 1-4обозначены позиции-ячейки на стеллаже, куда нужно переместитьдетали. Цифрами I-IV обозначены позиции-ячейки на ступенчатомскладе деталей.
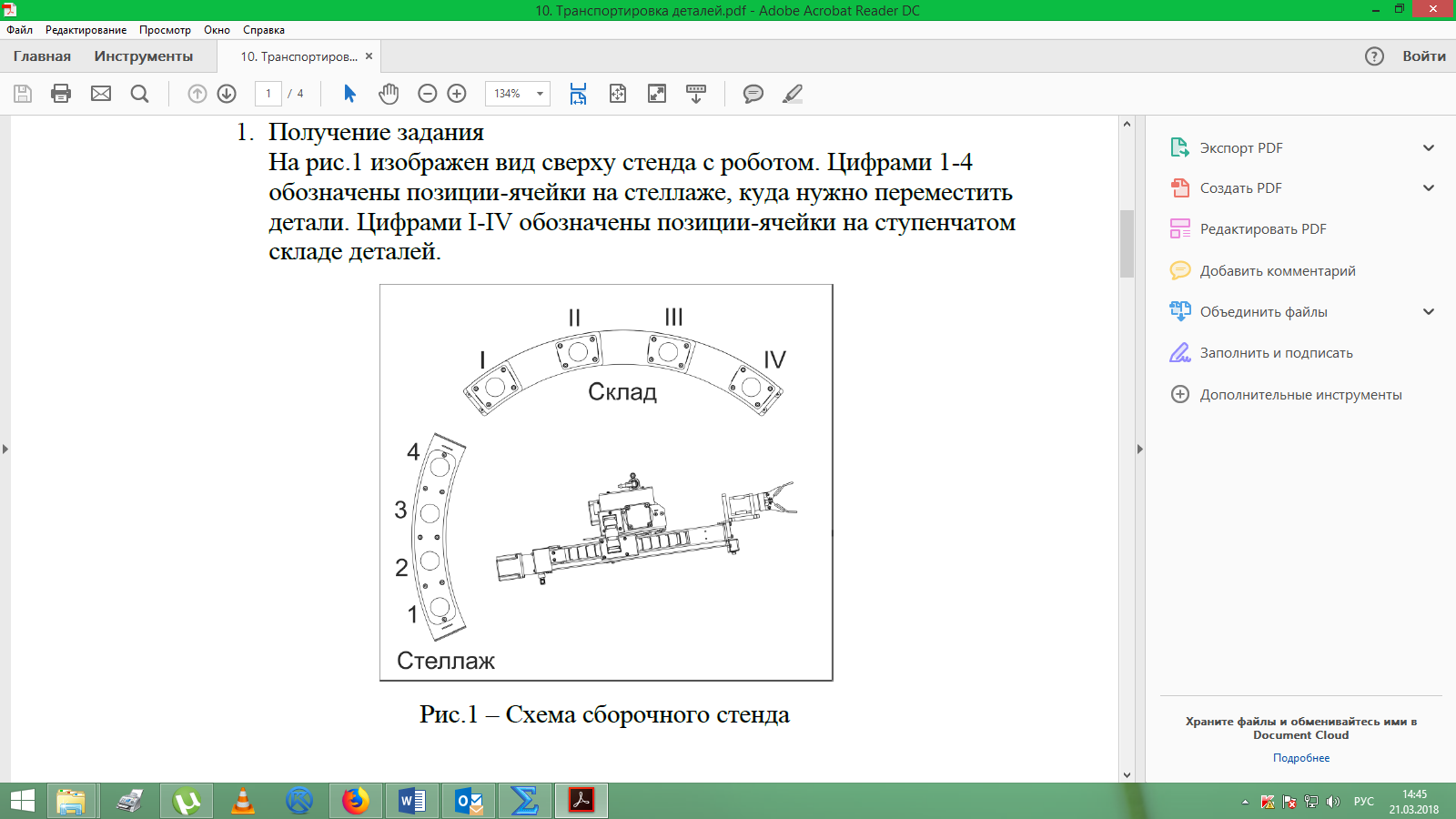
Рис.1 – Схема сборочного стенда
На рис.2 изображены детали для сборки, имеющие свое буквенное обозначение.
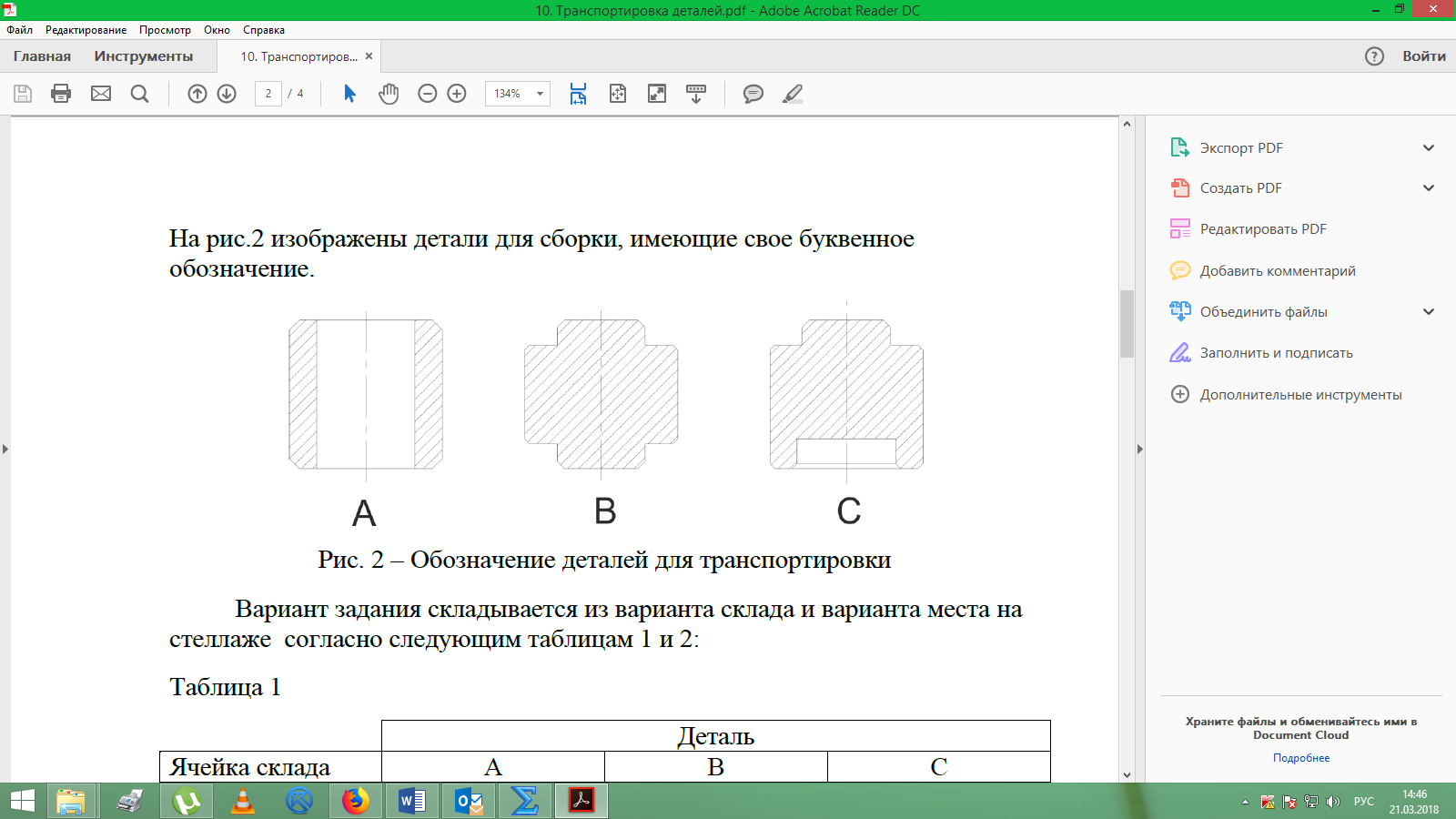
Рис. 2 – Обозначение деталей для транспортировки
Вариант задания складывается из варианта склада и варианта места на стеллаже согласно следующим таблицам 1 и 2:
Таблица 1
| Деталь | |||
| Ячейка склада | A | B | C |
| I | |||
| II | * | ||
| III | * | ||
| IV | * | ||
Таблица 2
| Деталь | |||
| Ячейка стеллажа | A | B | C |
| 1 | * | * | |
| 2 | |||
| 3 | * | ||
| 4 | |||
Таким образом, пример варианта задания выглядит следующим образом:
III A II B IV C 1 A 1 B 3 C
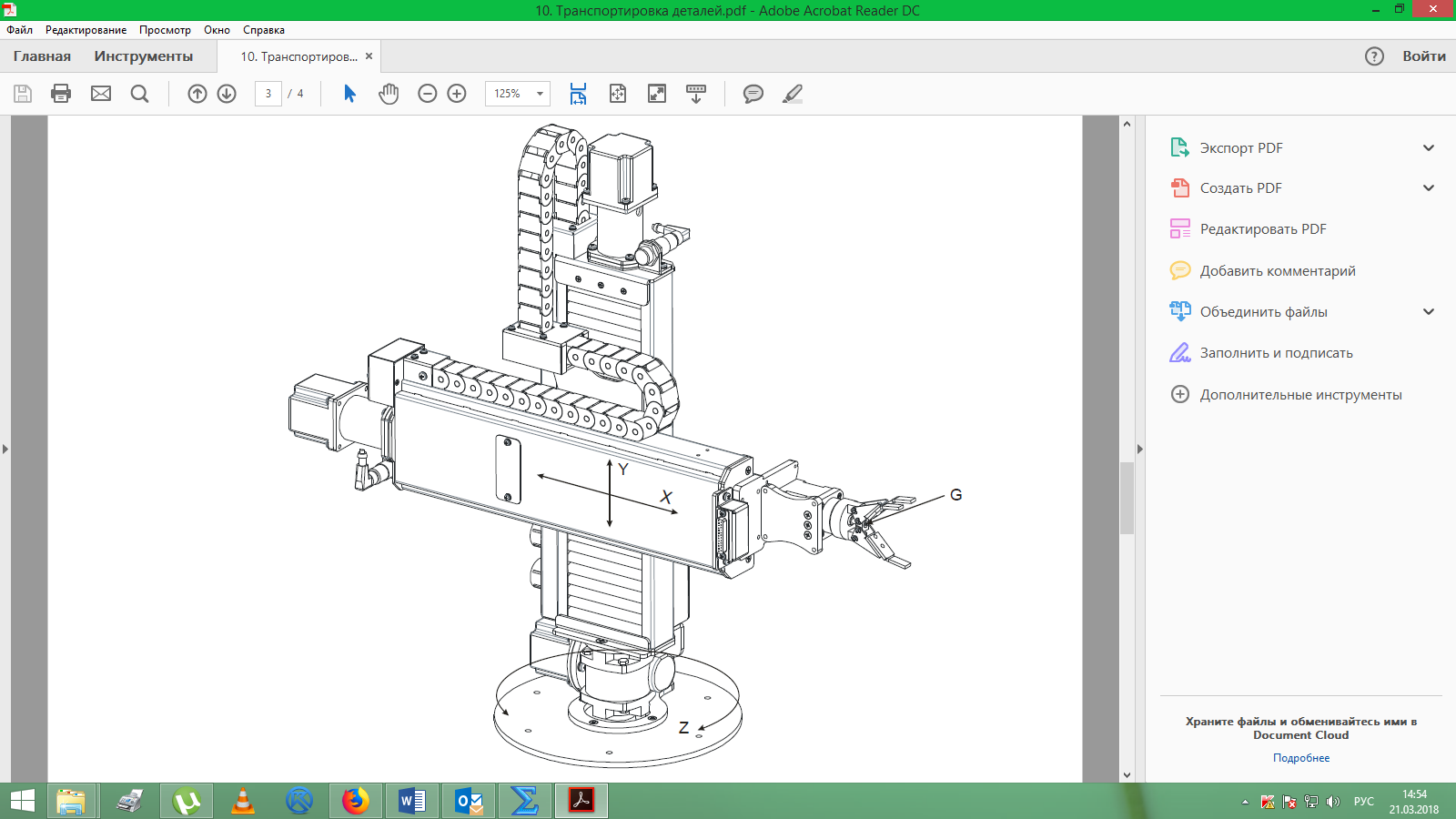
Рис.4 – Направления осей робота
Требуется переместить все детали со склада на стеллаж.
Краткий алгоритм действий:
-включить робот
-вывести робот в «0»
-идти в позицию первой детали
-открыть схват
-опустить схват в позицию на середине детали
-закрыть схват
-поднять деталь
-переместить деталь в заданную позицию на стеллаже
-поставить деталь
-открыть схват
-идти в позицию второй детали
-повторять действия до тех пор, пока все детали не окажутся на стеллаже в ячейках, соответствующих заданному варианту
-вывести робот в «0»
-выключить робот
Действия каждого шага выполняются последовательно с записью каждого положения робота.
Таблица 3
| № | Пояснение | X | Y | Z |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 | ||||
| 10 |
После заполнения Таблицы 3 необходимо привести полный текст управляющей программы робота.
Сделайте выводы о приобретенных навыках.
Контрольные вопросы
1. Назовите тип двигателя в приводах робота «Омега»
2. Какие особенности имеет процедура захвата детали роботом?
3. В какой системе координат работает робот «Омега»?
4. Какие основные команды реализованы в системе управления роботом?
Лабораторная работа №11
Дата добавления: 2018-05-01; просмотров: 573; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!