Изучение систем координат робота
Число степеней подвижности и каждое движение робота обеспечивается соответствующей кинематической схемой его механизмов. Кинематические схемы роботов имеют определенные структуры кинематики рук и кисти, которые зависят от вида и последовательности расположения вращательных (В) и поступательных (П) кинематических пар. Разработана классификация кинематических структурных схем руки и манипуляторов, состоящая из пар:
1 – ВВВ, трех вращательных;
2 – ВВП, двух вращательных и одной поступательной;
3 – ПВП, ВПП, ППВ, двух поступательных и одной вращательной;
4 – ППП – трех поступательных.
Форма рабочей зоны и возможности манипулирования объектом также определяются кинематической структурной схемой кисти манипулятора (жесткая, В, ВВ, ВВВ).
Характер переносных степеней подвижности (поступательных и вращательных) определяет базовую систему координат манипулятора. Если поступательных переносных степеней подвижности три (П=3), а вращательных вообще нет (В=0), то базовая система координат является прямоугольной, а рабочая зона имеет форму параллелепипеда (Рисунок 1).

Рисунок 1. - Прямоугольная система координат.
Несмотря на простоту конструкции, ПР с такой системой координат встречаются довольно редко, т.к. имеют большие габариты при малом объеме рабочей зоны и характеризуются сравнительно невысоким быстродействием. Такие роботы обычно либо подвешиваются над обслуживаемым технологическим оборудованием, либо монтируются на направляющих каретках под ним.
|
|
|
В том случае, когда П=2, В=1, рабочая зона ПР приобретает цилиндрическую форму, вернее форму неполного цилиндра (Рисунок 2).

Рисунок 2.- Цилиндрическая система координат.
Соответствующая этому случаю базовая система координат R,H, удобна и получила большое распространение. Она обеспечивает обслуживание большого объема рабочей зоны, но имеет недостаток, связанный с трудностью организации манипулирования предметами на малой высоте.
Если П=1, В=2, то рабочая зона представляет собой неполный шар, а базовая система координат R,, является сферической. Это наиболее универсальная система координат (Рисунок 3). Она обеспечивает обслуживание большего объема рабочей зоны, чем при прямоугольной и цилиндрической системах координат. Однако конструкция манипулятора в этом случае получается более сложной, а ПР нуждается в более сложной системе управления.

Рисунок 3. - Сферическая система координат.
При П=0, В=3 получают ангулярную (угловую) базовую систему координат,, (Рисунок 4).
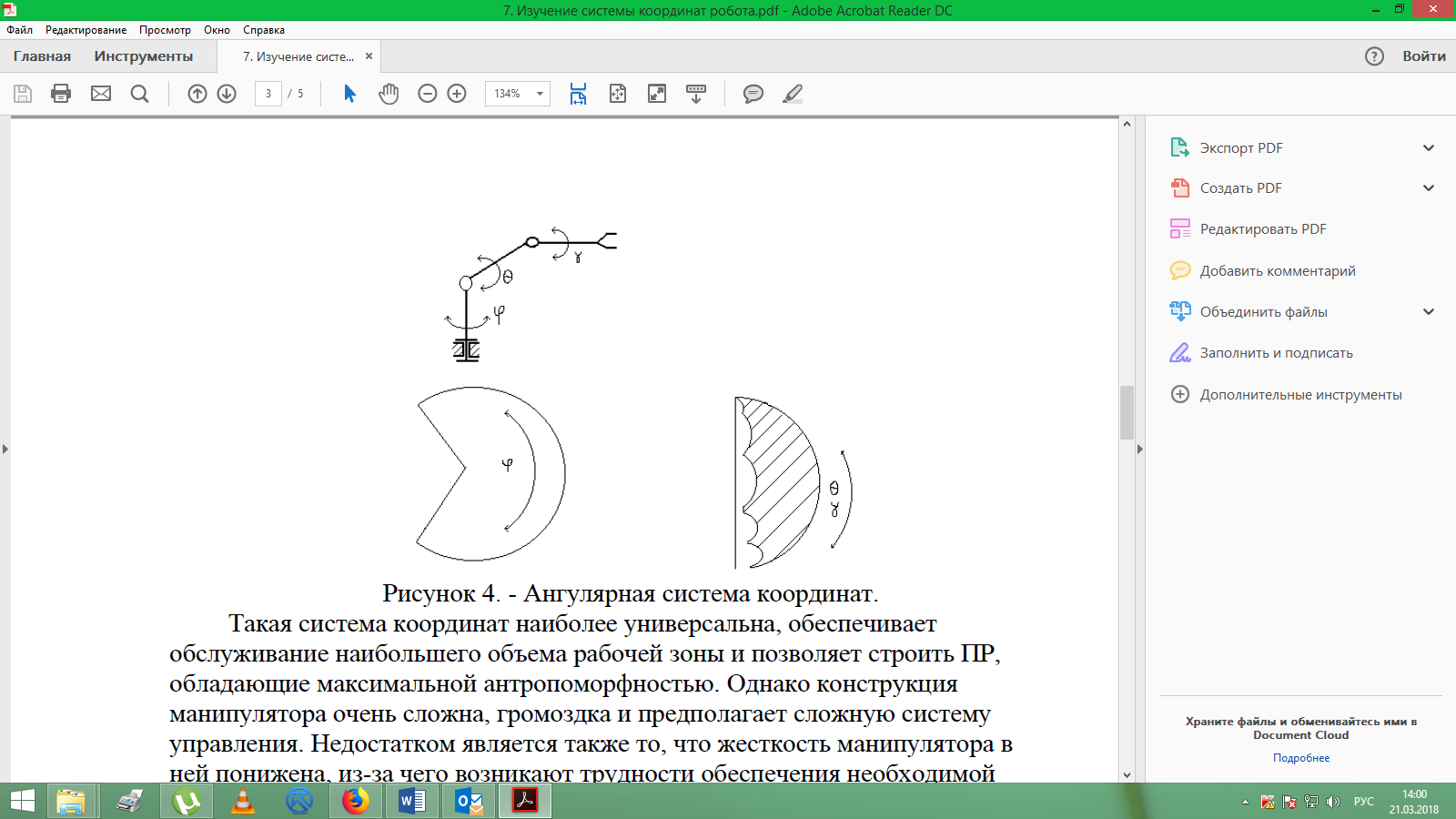
Рисунок 4. - Ангулярная система координат.
|
|
|
Такая система координат наиболее универсальна, обеспечивает обслуживание наибольшего объема рабочей зоны и позволяет строить ПР, обладающие максимальной антропоморфностью. Однако конструкция манипулятора очень сложна, громоздка и предполагает сложную систему управления. Недостатком является также то, что жесткость манипулятора в ней понижена, из-за чего возникают трудности обеспечения необходимой точности позиционирования.
Прямоугольная система координат реализуется тремя поступательными кинематическими парами, цилиндрическая – двумя поступательными и одной вращательной, сферическая – двумя вращательными и одной поступательной, угловая – тремя вращательными.
Анализ кинематических схем манипуляторов показывает две основные особенности:
- оси кинематических пар расположены параллельно либо перпендикулярно друг другу,
- звенья соединены в последовательную кинематическую цепь.
Вместе с тем они имеют ряд существенных недостатков:
- низкий показатель грузоподъемность/масса манипулятора, что обусловлено последовательной схемой соединения звеньев. Действительно, каждый привод должен перемещать не только полезную нагрузку, но и все последующие по цепи звенья.
|
|
|
- погрешности в перемещениях всех шарниров суммируются на концевой точке манипулятора, что приводит к низкой точности позиционирования манипуляторов по сравнению с машинами с декартовой компоновкой,
- относительно низкая жесткость манипуляционных роботов, так как упругое отклонение рабочего органа есть результат накопления деформаций по цепи по всем степеням подвижности робота. Причем весовые коэффициенты этой суммы пропорциональны расстояниям от концевой точки до осей соответствующих шарниров.
Робот Омега работает в цилиндрической системе координат. Направления движений робота указаны на Рисунке 2. G X Y Z

Рисунок 2 - Направления движений робота.
Области работы промышленного робота «Омега» представлены на Рисунке 3.

Рисунок 3. – Область рабочей зоны робота «Омега»
Цель работы– получить знания по существующим системам координат промышленных роботов.
Задачи:
1. Изучить теоретические сведения о существующих системах координат промышленных роботов
2. Рассмотреть схему робота «Омега»
3. В отчете по лабораторной работе зарисовать схему системы координат робота «Омега».
4. Написать программу для последовательного выхода звеньев робота в крайние точки рабочей зоны по всем осям.
|
|
|
5. Сделать вывод о полученных знаниях.
Контрольные вопросы
1. Как классифицируются кинематические пары?
2. Как определить степень подвижности манипулятора?
3. Каковы базовые системы координат манипулятора?
4. Какие звенья входят в конструкцию манипулятора
5. Что собой представляет структура манипулятора?
6. В какой системе координат работает манипулятор, выполненный по схеме ВПП?
7. В какой системе координат работает манипулятор, выполненный по схеме ППП?
8. В какой системе координат работает манипулятор, выполненный по схеме ВВВ?
Лабораторная работа №8
Дата добавления: 2018-05-01; просмотров: 1722; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!