Решим полученную систему уравнений.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Цель и задачи дисциплины
В теоретической механике изучаются основные объективные закономерности окружающего нас материального мира и методы их исследования, что является научной базой практически во всех областях современной техники.
Задачи изучения дисциплины:
ü иметь представление об объективных законах движения материальных тел, методах их моделирования, изучения и решения задач анализа и синтеза механических систем и их элементов;
ü знать и уметь использовать основные понятия, законы, принципы и методы механики; методы теоретических и экспериментальных исследований механизмов;
ü иметь опыт решения конкретных задач исследования статических, кинематических и динамических характеристик конструкций машин, механизмов и их элементов.
Методические рекомендации по изучению дисциплины
Дисциплина "Теоретическая механика" в определенной мере отличается от " чисто технических" курсов, например, сопромата и деталей машин своей большей абстрактностью предметов и методов исследований, а, следовательно, и большей общностью суждений и результатов.
Эти обстоятельства налагают определенную специфику на методику ее изучения. При изучении дисциплины по лекциям или учебникам рекомендуется это делать поэтапно, по темам (по разделам программы) т.к. каждая тема представляет собой единую проблему со своей методологией и аппаратом исследований. Поэтому в начале следует прочитать раздел (в лекциях или в учебнике) в целом. Если при этом возникнут вопросы или неясности, на них не стоит задерживаться, т.к. главная задача первого чтения уяснить идею раздела, а возникающие по ходу чтения неясности, как правило, проясняются при втором (опять же в "целом") чтении раздела. В случаях, когда вопросы остаются, в них следует разобраться отдельно. Целесообразно посмотреть их изложение в другой литературе. После этого рекомендуется выделить "центральные", "ключевые" моменты раздела и внимательно их изучить, понять и усвоить. Определения и теоретические утверждения, уяснить смысл каждого слова (его смысловую нагрузку). Часто бывает полезно задать себе вопрос "почему так?", можно ли упростить ту или иную формулировку утверждения и почему этого нельзя делать, что при этом будет упущено и почему это важно. Таким образом, важнейшим моментом в изучении любого раздела материала программы является его полное понимание и ни в коем случае не "заучивание" и "зазубривание". В итоге необходимо изложить содержание темы и раздела своими словами и запомнить основные рабочие формулы и последовательность рассуждений. Все это кратко записать в свой конспект по изучению дисциплины в целом. Опыт показывает, что подобная методика является наиболее эффективной и экономной. Если ей руководствоваться, то на изучение курса будет затрачено в целом наименьшее время. При изучении каждого раздела курса особое внимание должно быть обращено на решение задач. Для этого, усвоив материал темы или раздела целесообразно разобраться в примерах решения соответствующих задач и комментариях, к этим решениям приводимых в учебниках, методических указаниях, а также указаниях, записанных на практических занятиях при решении задач. При этом особое внимание надо обратить на методику (логическую последовательность действия) решения каждой задачи. После чего самостоятельно решить несколько аналогичных задач из сборника задач по теоретической механике и после этого перейти к решению соответствующей задачи из контрольного задания. Закончив изучение раздела надо проверить, можете ли Вы своими словами рассказать его сущность и написать рабочие формулы. После этого можно переходить к следующему разделу.
|
|
|
|
|
|
Контрольные вопросы
|
|
|
1. Основные понятия и аксиомы статики. Связи.
2. Реакции связей.
3. Сложение сил (графическое, аналитическое).
4. Момент силы относительно центра.
5. Момент силы относительно оси.
6. Момент силы как вектор.
7. Пара сил. Изображение пары.
8. Сложение пар в пространстве.
9. Системы сил (СС)
10. Приведение СС к заданному центру.
11. Теорема о параллельном переносе силы.
12. Условие равновесия. Алгебраическая и векторная форма.
13. Методика определения реакций опор.
14. Трение. Условия равновесия при наличии сил трения.
15. Центр параллельных сил.
16. Центр масс (тяжести) твердого тела.
17. Формулы для определения центра масс (тяжести) твердого тела.
18. Что изучает кинематика?
19. Чем отличается кинематика точки от кинематики твердого тела?
20. Основные характеристики движения.
21. Способы задания движения точки.
22. Определение кинематических характеристик точки.
23. Связь между характеристики движения
24. Поступательное движение твердого тела.
25. Вращательное движение вокруг неподвижной оси.
26.Основные формулы, описывающие вращательное движение.
27. Плоскопараллельное движение твердого тела.
28. Определение кинематических характеристик при плоском движении
|
|
|
29. Что изучает динамика?
30. Аксиомы динамики.
31. Основное уравнение динамики.
32. Прямая (первая) и обратная (вторая) задачи динамики.
33. Моменты инерции простейших тел.
34. Дифференциальные уравнения движения точки.
35. Дифференциальные уравнения движения твердого тела.
36. Дифференциальные уравнения относительного движения точки,
механической системы.
37. Прямолинейные колебания материальной точки.
38. Теорема о движении центра масс системы.
39. Теорема об изменении количества движения точки.
40. Теорема об изменении количества движения систем.
41. Теорема об изменении момента количества движения точки.
42. Теорема обизменении момента количества движения системы.
43. Интегральная и дифференциальная форма каждой из вышеперечисленных теорем.
44. Теорема об изменении кинетической энергии.
45. Принцип Даламбера.
46. Принцип возможных перемещений.
47. Число степеней свободы системы.
48. Формула Чебышева.
49. Общее уравнение динамики.
50. Обобщенные координаты и скорости, их связь с числом степеней свободы.
51. Уравнение Лагранжа II рода.
52. Элементы теорий удара.
53. Основная теорема.
54. Теорема Карно.
55. Абсолютно упругий и абсолютно неупругий удары.
Работа выполняется в на листах формата А4 в печатном виде(щрифт Times New Roman? 14 тп). На титульном листе указывается: название дисциплины, фамилия и инициалы студента, факультет, специальность, ф.и.о преподавателя.
Решение каждой задачи следует начинать с нового листа. Условия задачи записывать в краткой форме. Чертеж выполнять аккуратно, четко, показывая оси координат, векторы сил, скоростей, ускорений. Углы должны соответствовать исходным данным, линейные размеры изображать в одном (принятом) масштабе.
При решении задачи уравнения необходимо составлять и решать относительно неизвестных в буквенном виде после чего подставлять числовые значения в порядке входящих букв и записывать результат вычисления. В конце решения задачи выписать ответ и произвести его анализ.
Работа должна заканчиваться списком использованной литературы и подписью студента.
Примечание.
При разработке настоящего учебного пособия за основу приняты контрольные задания по теоретической механике под редакцией С.М. Тарга различных лет издания.
СТАТИКА
Задача С.
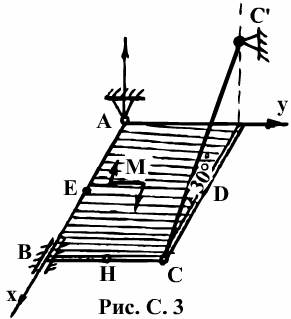
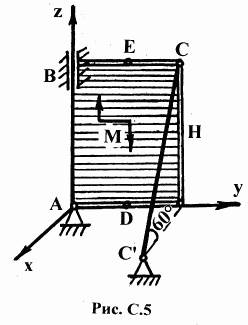
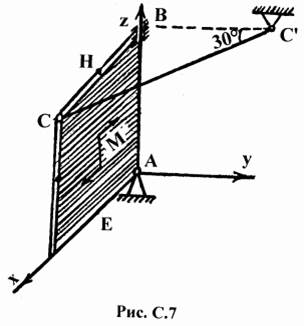
Однородная прямоугольная плита весом Р=5 кН со сторонами АВ=3а, ВС=2а, закреплена в точках А,В,С (рис. С0,...,С9). На плиту действует пара сил с моментом М=5кНм, лежащая в плоскости плиты, и две силы. Точки приложения сил, их направление и значение указанны в таблице С (точки Д,Е,Н находятся в серединах сторон плиты).
Определить реакции связей в точках А,В,С.
При расчетах принять а = 0,5м.
Таблица С.
| Сила |
|
|
| |||
|
Условия | F1=4 кН | F2=6 кН | F3=8 кН | |||
| Точка приложения | α1 | Точка Приложения | α2 | Точка приложения | α3 | |
| 0 | Д | 60 | Е | 0 | ||
| 1 | Н | 90 | Д | 30 | -- | -- |
| 2 | Д | 90 | Е | 60 | -- | -- |
| 3 | Н | 0 | -- | -- | Е | 30 |
| 4 | Е | 0 | -- | -- | Н | 60 |
| 5 | -- | -- | Д | 60 | Н | 0 |
| 6 | Д | 90 | Н | 30 | -- | -- |
| 7 | Е | 30 | Н | 90 | -- | -- |
| 8 | Е | 60 | -- | -- | Д | 0 |
| 9 | -- | -- | Е | 90 | Д | 30 |









Методические указания
Задача решается исходя из условия равновесия механической системы при действии на нее произвольной пространственной системы сил.
Порядок решения задачи
1. Изобразить схему механической системы, показать действующие на нее силы согласно условию задачи.
2. Выделить тело или группу тел, равновесие которых будет рассматриваться. Провести оси координат X,Y,Z.
3. Заменить действие связей соответствующими реакциями.
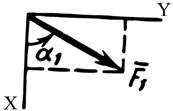
4. Преобразовать полученную систему сил к виду, удобному для составления уравнений равновесия: силы, направленные под углом к осям координат, разложить на составляющие, параллельные осям.

гдеα, β, γ - углы между направлениями вектора  и направлениями осей X , Y , Z соответственно.
и направлениями осей X , Y , Z соответственно.
5. Составить шесть уравнений равновесия.
6. Решить полученную систему уравнений относительно неизвестных реакций, провести анализ результатов решения.
При выделении тела, равновесие которого будет рассматриваться, необходимо учитывать, чтобы число неизвестных реакций связей, наложенных на это тело, соответствовало числу уравнений равновесия.
При составлении уравнений моментов относительно оси следует помнить, что момент силы перпендикулярной оси равен произведению модуля силы на кратчайшее расстояние между осью и линией действия силы (плечо силы). Знак момента можно определить по правилу: момент положителен, если сила «стремится» повернуть плечо относительно оси против хода часовой стрелки при виде на плечо с положительного направления оси. Момент силы относительно оси равен нулю, если линия действия силы параллельна оси или пересекается с осью.
Пример решения задачи
Однородная прямоугольная плита весом Р закреплена сферическим шарниром в точке А, цилиндрическим – в точке Д и невесомым шарнирным стержнем СС1, расположенным в плоскости, параллельной ZХ. К плите приложена сила в плоскости YZ и пара сил в плоскости XY с моментом M. Точка приложения силы, направление силы, линейные размеры плиты показаны на схеме. Определить реакции связей в точках A,C,Д.
Дано: P=2 кН, F=10 кН, M=3 кНм, α=30º, а=0,5 м.
Определить: реакции в точках А,С,Д.
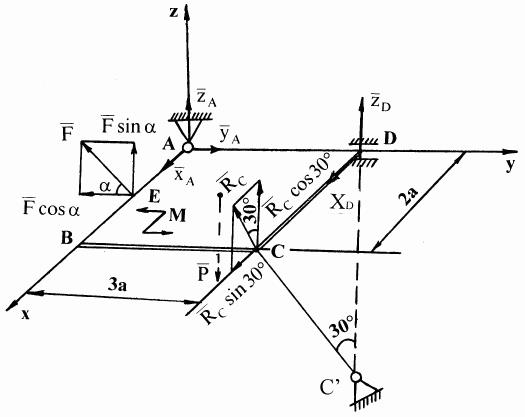
Рис. С10
Решение
1. Изобразим схему плиты с опорами и действующие на нее силы в соответствии с условием задачи (Рис. С10).
2. Для определения реакций в точках А, С, Д рассмотрим равновесие плиты АВСД.
3. Покажем на схеме реакции связей. Реакцию неподвижного сферического шарнира представим в виде трех составляющих  ,
, 
 ,
,  , реакцию цилиндрического шарнира – двумя составляющими
, реакцию цилиндрического шарнира – двумя составляющими  , реакцию
, реакцию  невесомого стержня направим по линии стержня.
невесомого стержня направим по линии стержня.
Разложим силы  и на составляющие, параллельные осям.
и на составляющие, параллельные осям.
 = cosα + sinα; = cos30º+ sin30º
= cosα + sinα; = cos30º+ sin30º
4. Составим шесть уравнений равновесия полученной системы сил.
1. Σ Fкх =0; XA + Rcsin 30º+ X Д =0
2. Σ F ky =0; YA - Fcosα α =0
3. Σ F kz =0; ZA + Fsinα + Rccos 30º+ Z Д - P =0
4. Σ Mx(Fk)=0; Rccos30º*3a+ Z Д *3a- P*1,5a=0
5. Σ My(Fk)=0; -Fsinα*a- Rccos30º*2a+ P*a=0
6. Σ Mz(Fk)=0; -Fcosα*a- Rcsin30º*3а-X Д *3 а + М =0
Решим полученную систему уравнений.
Из уравнения 2:
YА=Fcosα=10*cos30º=8,66 кН
Из уравнения 5:
Rс= 
Из уравнения 6:

Из уравнения 1:
XA = -Rcsin30º-X2 = -1,73*sin30º+1,75=0,9 кН
Из уравнения 4:
ZД = 
Из уравнения 3:
ZA= -Fsinα-Rccos30º-ZД+P= -10*sin30º-1,73cos30º+2= -1,5 кН
Ответ: XA=0,9 кН , YA=8,66 кН , ZA=1,5 кН
XД = -1,75 кН , ZД =0 кН , Rc= -1,73 кН
Знаки минус указывают, что реакции ,  , направлены противоположно принятому на схеме.
, направлены противоположно принятому на схеме.
КИНЕМАТИКА
Задача К1
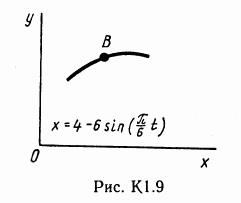
Точка В движется в плоскости XY (рис. К1.0...К1.9; траектория точки на рисунке показана условно). Закон движения точки задан уравнениями X=f1(t), Y=f2(t), где X и Y выражены в сантиметрах, t - в секундах. Зависимость X=f1(t) указана непосредственно на рисунках, а зависимость Y=f2(t) дана в табл. К1.
Найти уравнение траектории точки, определить скорость и ускорение точки, а также ее касательное и нормальное ускорение и радиус кривизны для момента времени t=1с.
Указания. Задача К1 относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются касательное и нормальное ускорения точки.
В данной задаче все искомые величины нужно определить только для момента времени t1 = 1c. В некоторых вариантах задачи при определении траектории или при последующих расчетах для упрощения следует учесть известные из тригонометрии формулы:
Таблица К1
| Номер усл-я | Y=f2(t) | ||
| Рис. 0-2 | Рис. 3-6 | Рис.7-9 | |
| 0 | 4 –9 cos 
| t2-2 | -4 cos 
|
| 1 | 2 –3 cos
| 8 cos 
| 10 sin
|
| 2 | 4 –6 cos
| 4+2t2 | 12 sin2
|
| 3 | 12 cos
| 2(t+1)2 | 2 –4 sin
|
| 4 | 9 cos 
| 2+2 sin
| 12 cos 
|
| 5 | -10 cos
| 3t2-2 | 3 sin
|
| 6 | 8 cos 
| (t+1)3 | 16 sin2 
|
| 7 | -9 cos2
| 3 –4 cos
| 6 cos
|
| 8 | 6 cos 
| 2t3 | 4 –9 sin
|
| 9 | 2 - 2 cos
| 2 sin
| 8 cos 
|



Пример решения задачи К1
Даны уравнения движения точки в плоскости XY:
X= -2 cos  , Y=2 sin
, Y=2 sin 
(X, Y- в см, t – в с).
Определить:
ü уравнение траектории точки;
ü скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны траектории при t=1 с.
Решение:
1. Для определения уравнения траектории точки у=f(x) необходимо исключить из заданных уравнений движения время t. Поскольку t входит в аргументы тригонометрических функций, где один аргумент вдвое больше другого, используем формулу:
cos 2α =1-2 sin2α или cos  , (1)
, (1)
Из уравнений движения находим выражения функций:
cos  sin
sin 
Полученные значения функций подставляем в равенство (1).

Отсюда окончательно находим следующее уравнение траектории точки (парабола, рис. К1.10):
x=(y+1)2+1

|
 ;
;


при t 1 =1 c : v 1 x =1,11 см/с, v 1 y =0,73 см/с, v 1 =1,33 см/с
3. Аналогично найдем ускорение точки

и при t 1 =1 c :
 ,
, 
4. Касательное ускорение  найдем, дифференцируя по времени равенство V2=Vx2+Vy2. Получим:
найдем, дифференцируя по времени равенство V2=Vx2+Vy2. Получим:
 и
и 
Числовые значения величин Vx, Vy, ax, ay, входящих в правую часть выражения, определены выше. Подставив эти значения, найдем, что при t1=1 c  .
.
5. Нормальное ускорение точки найдем из равенства  откуда
откуда  . Подставляя найденные числовые значения a1 и a1τ, получим, что при t1=1 c, a1n=0,58 см/с2.
. Подставляя найденные числовые значения a1 и a1τ, получим, что при t1=1 c, a1n=0,58 см/с2.
6. Радиус кривизны траектории определим из выражения  или
или  Подставляя числовые значения V1 и a1n, найдем, что при t1=1 c, ρ1=3,05 cм.
Подставляя числовые значения V1 и a1n, найдем, что при t1=1 c, ρ1=3,05 cм.
Ответ: V1=1,33 см/с, a1=0,88 см/с2,
a1n=0,58 см/с2, ρ1=3,05 cм.
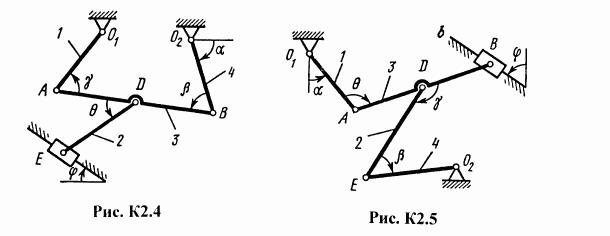
Задача К2
Плоский механизм состоит из стержней, соединенных между собой и с неподвижными опорами цилиндрическими шарнирами. Схемы механизмов приведены на рисунках К2.0,...,К2.9. Положение механизма определяется углами α, β, γ, φ, θ, значения которых даны в табл. К2.а и К2.б. Длины стержней: l1=0,4 м, l2=1,2 м, l3= 1,4 м, l4=0,6 м. Точка Д находится посередине стержня «2».
Заданы угловая скорость и угловое ускорение одного из стержней механизма или скорость и ускорение точек этих стержней. Определить кинематические характеристики точек и стержней, указанные в столбце «найти».
Положительным направлением угловых скоростей и ускорений считать против хода часовой стрелки, линейных скоростей и ускорений - от точки «В» к точке «в».
Таблица К2а (к рисункам К0...К4)
| № усл. | Углы, град | Дано | Найти | ||||||||
| α | β | γ | φ | 
|  1/c
1/c
|  1/c
1/c
| V точ. |  звена
звена
| а точ. | ε звена | |
| 0 | 0 | 60 | 30 | 0 | 120 | 6 | -- | В,Е | ДЕ | В | АВ |
| 1 | 90 | 120 | 150 | 0 | 30 | -- | 4 | А,Е | АВ | А | АВ |
| 2 | 30 | 60 | 30 | 0 | 120 | 5 | -- | В,Е | АВ | В | АВ |
| 3 | 60 | 150 | 150 | 90 | 30 | -- | 5 | А,Е | ДЕ | А | АВ |
| 4 | 30 | 30 | 60 | 0 | 150 | 4 | -- | Д,Е | АВ | В | АВ |
| 5 | 90 | 120 | 120 | 90 | 60 | -- | 6 | А,Е | АВ | А | АВ |
| 6 | 90 | 150 | 120 | 90 | 30 | 3 | -- | В,Е | ДЕ | В | АВ |
| 7 | 0 | 60 | 60 | 0 | 120 | -- | 2 | А,Е | ДЕ | А | АВ |
| 8 | 60 | 150 | 120 | 90 | 30 | 2 | -- | Д,Е | АВ | В | АВ |
| 9 | 30 | 120 | 150 | 0 | 60 | -- | 8 | А,Е | ДЕ | А | АВ |
Таблица К2б (к рисункам К5...К9)
| № усл. | Углы, град | Дано | Найти | ||||||||||
| α | β | γ | φ | θ | ω1 1/c | ε 1 1/c2 | VB м/с | аВ м/с | V точ. | ω зве на | а точ. | ε зве на | |
| 0 | 120 | 30 | 30 | 90 | 150 | 22 | 4 | -- | -- | В,Е | АВ | В | АВ |
| 1 | 0 | 60 | 90 | 0 | 120 | -- | -- | 4 | 6 | А,Е | ДЕ | А | АВ |
| 2 | 60 | 150 | 30 | 90 | 30 | 3 | 5 | -- | -- | В,Е | АВ | В | АВ |
| 3 | 0 | 150 | 30 | 0 | 60 | 4 | 6 | 6 | 8 | А,Е | АВ | А | АВ |
| 4 | 30 | 120 | 120 | 0 | 60 | 4 | 6 | 2 | -- | В,Е | ДЕ | В | АВ |
| 5 | 90 | 120 | 90 | 90 | 60 | -- | -- | 8 | 10 | Д,Е | ДЕ | А | АВ |
| 6 | 0 | 150 | 90 | 0 | 120 | 5 | 8 | -- | -- | В,Е | ДЕ | В | АВ |
| 7 | 30 | 120 | 30 | 0 | 60 | -- | -- | 2 | 5 | А,Е | АВ | А | АВ |
| 8 | 90 | 120 | 120 | 90 | 150 | 6 | 10 | -- | -- | В,Е | ДЕ | В | АВ |
| 9 | 60 | 60 | 60 | 90 | 30 | -- | -- | 5 | 4 | Д,Е | АВ | А | АВ |




Методические рекомендации
Задача К2 - на исследование движения плоского механизма.
Порядок решения задачи
1. Построить схему механизма в соответствии с заданными длинами стержней и углами.
2. Определить типы движения тел (звеньев) составляющих механизм.
3. Определить скорости точек и угловые скорости звеньев механизма.
4. Определить ускорение точки и угловое ускорение звена указанного в задании.
Нахождение скоростей и ускорений точек принадлежащих звеньям механизма следует производить последовательно, начиная с звена, движение которого задано в условиях задачи. При определении скоростей и ускорений целесообразно сначала записать соответствующую формулу в общем виде исходя из типа движения тела, которому принадлежит точка. После этого конкретизировать формулу согласно схеме механизма и произвести вычисление результата. При решении задачи следует учитывать, что в шарнирном соединении совпадают точки двух звеньев. Скорость и ускорение этих точек равны между собой, т.е. скорость или ускорение, найденные для точки одного звена справедливы для одноименной точки другого звена.
Напомним формулы для определения скоростей и ускорений точек тел при различных типах их движения.
При вращательном движении твердого тела скорость точки определяется по формуле Эйлера V=ωR,  .
.
где: ω – угловая скорость вращения тела,
R – радиус (кратчайшее расстояние от центра или оси вращения до точки)

 ;
;  ┴R
┴R

Для определения скорости точки при плоскопараллельном движении тел следует воспользоваться теоремой о проекциях скоростей двух точек тела или понятием о мгновенном центре скоростей.
Определение скорости с помощью теоремы о проекциях скоростей:

где: V А , VB – скорости точек А и В, принадлежащих одному твердому телу,
α, β – углы между векторами скоростей точек А и В и прямой, проведенной через точки А,В
Эту формулу следует применять в том случае, если известно направление вектора искомой скорости.
Определение скорости точки с помощью мгновенного центра скоростей (рис. К2.10).

|


Рис. К2.10
где: VB – искомая скорость точки В,
VA – известная скорость другой точки этого тела,
C - мгновенный центр скоростей (мгновенный центр вращения),
ωc – угловая скорость тела относительно центра С,
СА, СВ – расстояние точек А и В от центра С (мгновенные радиусы).
Вектор искомой скорости  перпендикулярен мгновенному радиусу СВ. При определении угловой скорости звена следует использовать свойство, что скорость вращения звена в плоскости по модулю и направлению равна угловой скорости звена относительно мгновенного центра скоростей
перпендикулярен мгновенному радиусу СВ. При определении угловой скорости звена следует использовать свойство, что скорость вращения звена в плоскости по модулю и направлению равна угловой скорости звена относительно мгновенного центра скоростей

Дата добавления: 2021-06-02; просмотров: 134; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!