КИНЕМАТИЧЕСКИЙ РАСЧЁТ МАНИПУЛЯТОРА
Расчёт модуля выдвижения руки
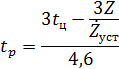
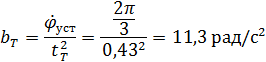
Выразим время установившегося движения:
Рассмотрим движение руки вдоль горизонтальной оси:
R = 0,15 м

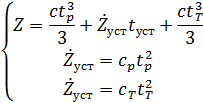
Составим систему уравнений:

Следовательно:

Вычислим время разгона, торможения и установившегося движения:


Из системы уравнений выразим постоянные коэффициенты  и
и  :
:
Зная это, вычислим законы изменения скоростей и ускорений при разгоне и торможении, а также максимальное ускорение:


Построим графики: скоростей  (рис. 10) и ускорений
(рис. 10) и ускорений  (рис. 11):
(рис. 11):
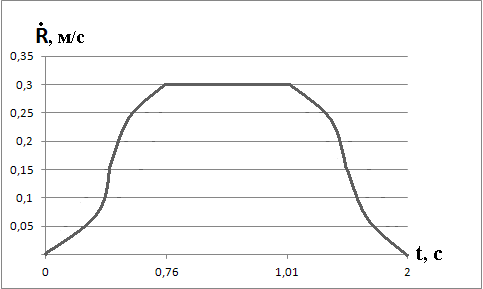
Рис. 10. График скоростей для выдвижения руки
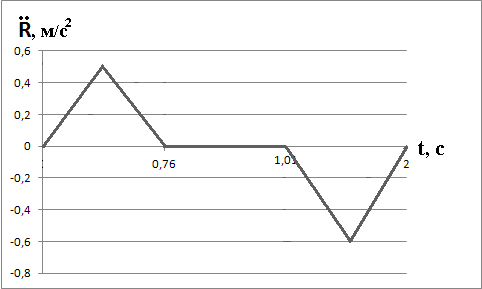
Рис. 11. График ускорений для выдвижения руки
Расчёт модуля подъёма руки
Для расчета модуля подъема составим систему уравнений, аналогичную системе расчёта модуля выдвижения руки, но с учетом того, что Z = 0,05 м.
Вычислим время разгона, торможения и установившегося движения, с учетом того, что совершается подъем:
Тогда:
Аналогично получим постоянные коэффициенты  и
и  :
:
Следовательно:


Построим графики скоростей  (рис. 12) и ускорений
(рис. 12) и ускорений  (рис. 13):
(рис. 13):
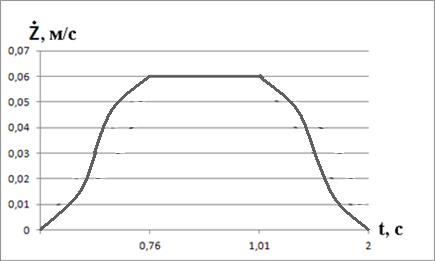
Рис. 12. График скоростей для подъёма руки
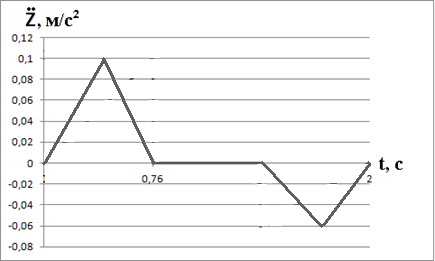
Рис. 13. График ускорений для подъёма руки
Расчёт модуля поворота руки
Для расчета модуля подъема составим систему уравнений, аналогичную системе расчёта выдвижения руки, но с учетом того, что j = p рад.

Вычислим время разгона, торможения и установившегося движения, с учетом того, что совершается поворот:
|
|
|
Тогда:


Аналогично получим постоянные коэффициенты  и
и  :
:
Следовательно:


Построим графики скоростей  (рис. 14) и ускорений
(рис. 14) и ускорений  (рис. 15):
(рис. 15):
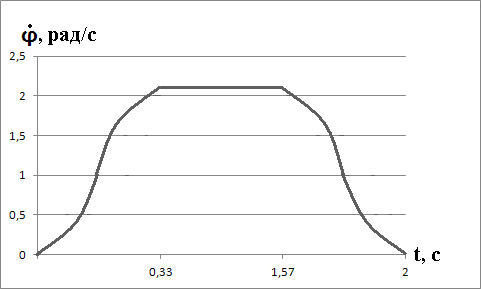
Рис. 14. График скоростей для поворота руки
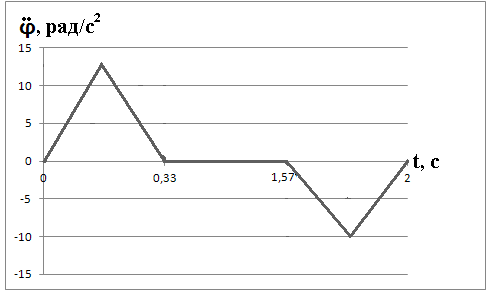
Рис. 15. График ускорений для поворота руки
СИЛОВОЙ РАСЧЁТ МАНИПУЛЯТОРА
Силовой расчёт модулей манипулятора
Каретка
Данные, необходимые для расчета: r = 2600 кг/м3; d = 0,012 м;
B = 0,052 м; H = 0,094 м; L=0,06 м.

Рис. 16. Каретка
Определим объем каретки:

Координаты центра тяжести определим по формулам:
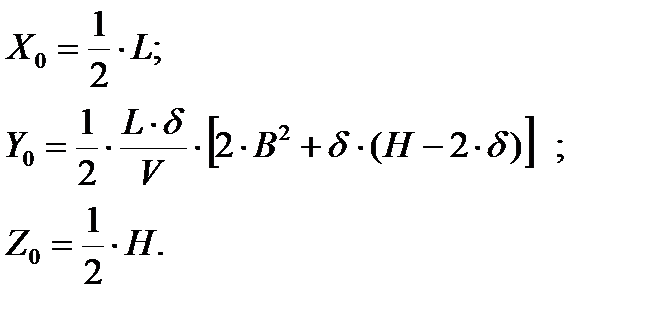
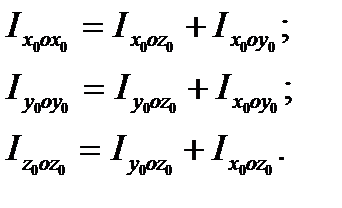
Моменты инерции относительно центральных плоскостей:
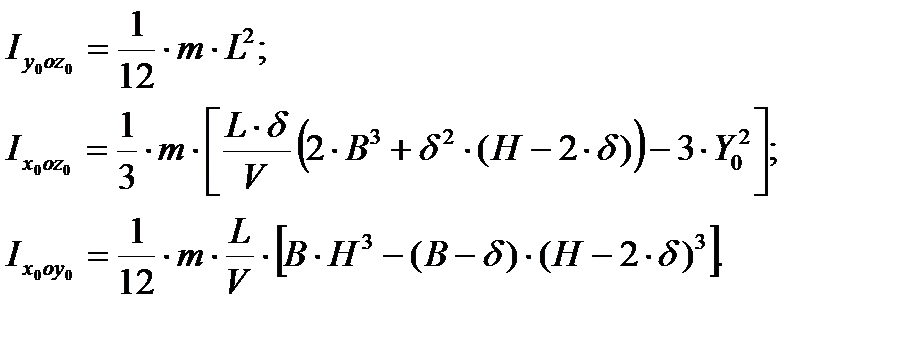
Определим главные центральные моменты инерции:
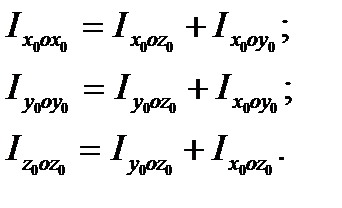
Таким образом, получим, что главный центральный момент инерции каретки относительно оси Z0 равен:

Вычислим объем каретки:
 м3
м3
Вычислим массу каретки:
 кг
кг
Вычислим координату центра тяжести каретки по оси y :
 м
м
Тогда:

Корпус модуля подъема.
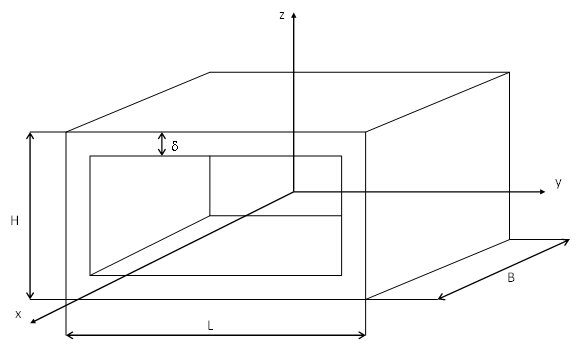
Рис. 17. Корпус модуля подъёма
Данные, необходимые для расчета: r = 2600 кг/м3; d = 0,02 м;
B = 0,14 м; H = 0,18 м; L = 0,22 м.
Определим объем каретки:
|
|
|

Моменты инерции относительно центральных плоскостей:



Определим главные центральные моменты инерции:
Таким образом, получим, что главный центральный момент инерции каретки относительно оси Z0 равен:
Вычислим объем корпуса модуля подъема:

Вычислим массу корпуса модуля подъема:

Тогда:

Рассмотрим модуль выдвижения руки манипулятора, расчетная схема которого представлена на рис. 20, причём конструкция сечения такова, что не позволяет провернуться в опорах вокруг горизонтальной оси.
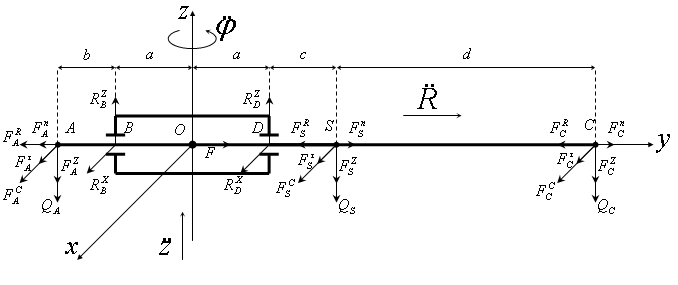
Рис. 18. Модуль выдвижения руки манипулятора
В точке С находится центр масс груза и захватного устройства. В точке S находится центр масс подвижной части руки манипулятора. В точке А находится центр масс противовеса.
Кроме сил тяжести и реакций в опорах звеньев манипулятора, приложим к центрам масс звеньев силы инерции. Для их определения необходимо в критический момент времени знать значения скоростей и ускорений при выдвижении, повороте и подъёме руки.
Для выдвижения: t = 2 c;  м/с;
м/с;  м/с2.
м/с2.
Для поворота: t = 2 с;  с-1;
с-1;  рад/с2.
рад/с2.
Для подъёма: t = 2 с;  м/с;
м/с;  м/с2.
м/с2.
Запишем значения величин, необходимые для проведения расчетов:
а = 0,06 м; b = 0,05 м; с = 0; d = 0,12 м; mC = 1,1 кг; m А = 0,7 кг; mS = 5,85 кг.
|
|
|
Определим силы инерции, действующие на манипулятор:
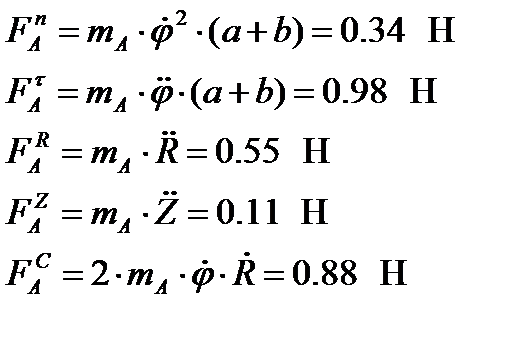
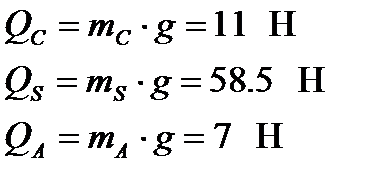
Определим силы тяжести элементов конструкции:
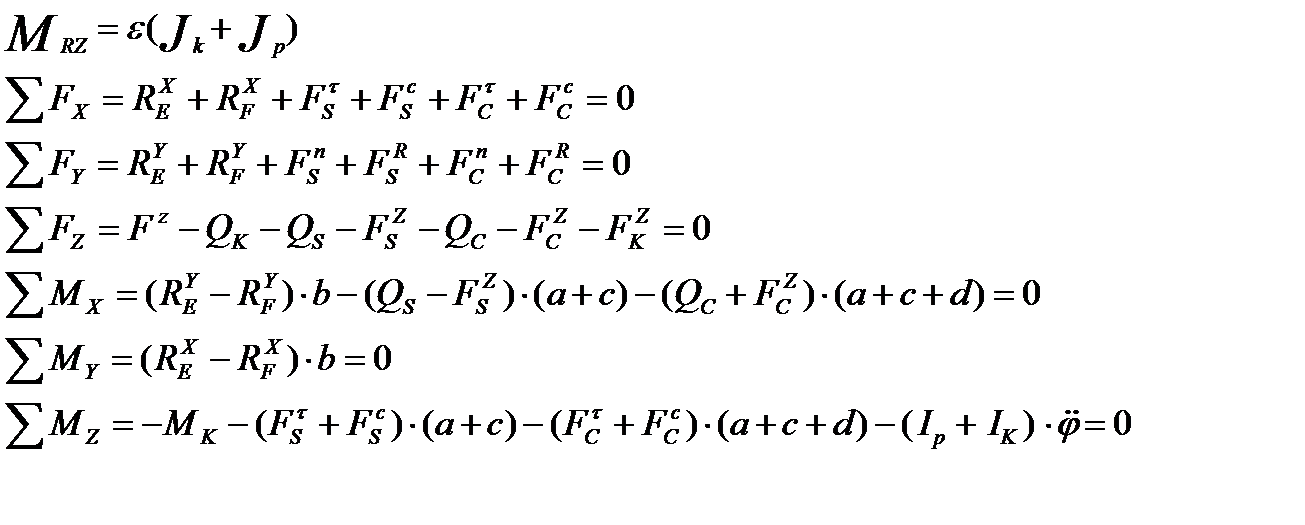
Запишем уравнения кинетостатического равновесия:
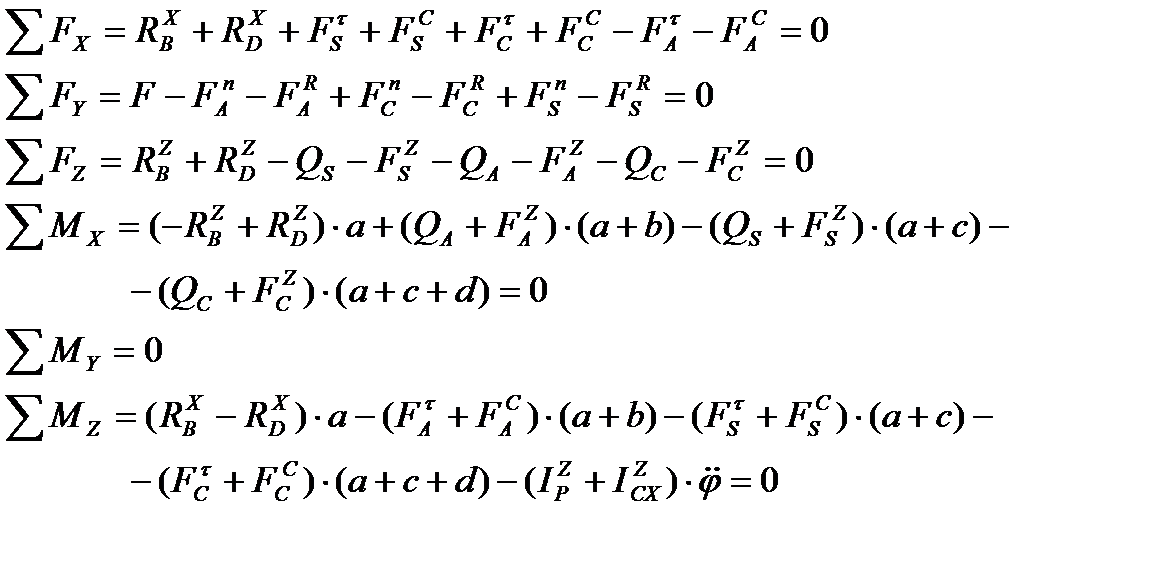
IZP и IZ СХ вычислены ранее. Из уравнений получим составляющие реакций в опорах вдоль оси х:  и
и  , и вдоль оси z:
, и вдоль оси z:  и
и  . А также определим толкающую силу:
. А также определим толкающую силу:  .
.
Определим суммарные реакции в точках B и D:
Рассмотрим модуль подъема манипулятора, расчетная схема которого представлена на рис. 21, причем конструкция сечения такова, что не позволяет провернуться в опорах вокруг вертикальной оси.
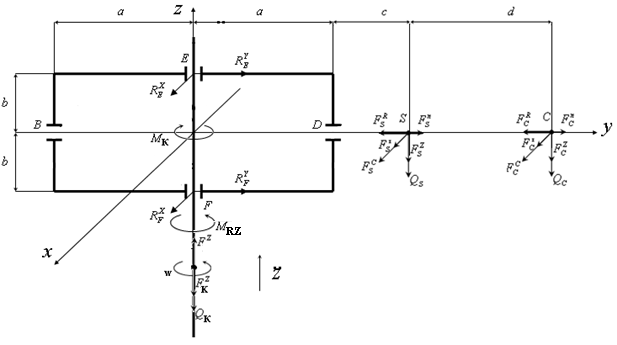
Рис. 19. Модуль подъёма манипулятора
В точке К находится центр тяжести каретки.
Запишем значения величин, необходимые для проведения расчетов:
а = 0,06 м; b = 0,027 м; mК = 0,325 кг; с = 0; d = 0,12 м; mC = 1,1 кг; m А = 0,7 кг; mS = 5,85 кг.
Определим недостающие силы инерции, действующие на манипулятор:

Определим силы тяжести элементов конструкции:

Запишем уравнения кинетостатического равновесия:
Из уравнений получим составляющие реакций в опорах вдоль оси х:  и
и  , и вдоль оси y:
, и вдоль оси y:  и
и  . А также определим подъемную силу:
. А также определим подъемную силу:  и момент сопротивления:
и момент сопротивления:  .
.
Определим суммарные реакции в точках Е и F:
|
|
|
Рассмотрим модуль поворота манипулятора, расчетная схема которого представлена на рис. 20:
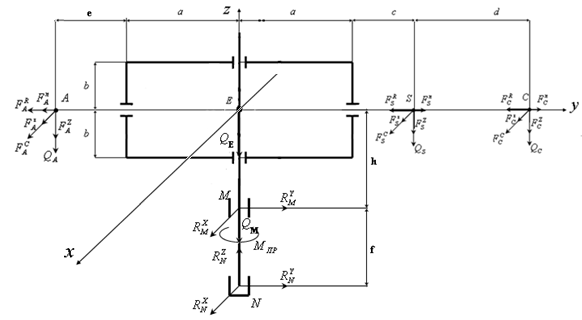
Рис. 20. Модуль поворота манипулятора
В точке Е находится центр тяжести каретки.
Запишем значения величин, необходимые для проведения расчетов:
а = 0,06 м; b = 0,027 м; с = 0; d = 0,12 м; h = 1 м; f = 0,4 м; е = 0,05 м; mCT = 8,7 кг; mК = 0,325 кг; mC = 1,1 кг; m А = 0,7 кг; mS = 5,85 кг.
Определим силы тяжести элементов конструкции:

Запишем уравнения кинетостатического равновесия:
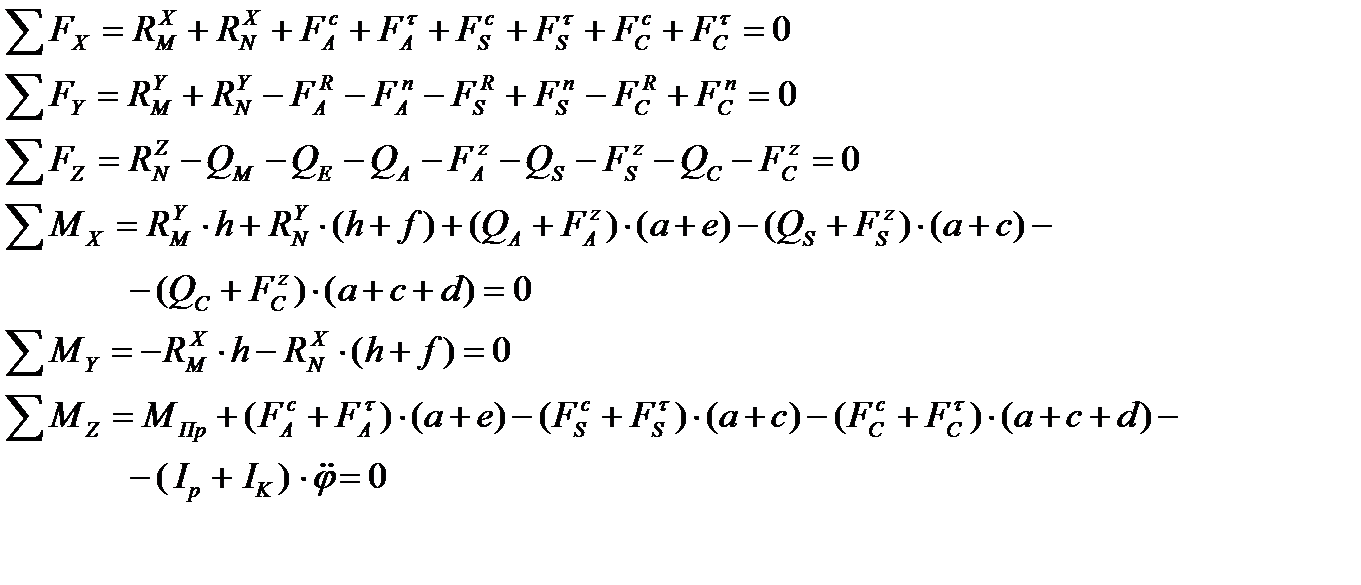
Из уравнений получим составляющие реакций в опорах вдоль оси х:  и
и  , вдоль оси y:
, вдоль оси y:  и
и  , и вдоль оси z:
, и вдоль оси z:  . А также определим момент сопротивления:
. А также определим момент сопротивления:  .
.
Определим суммарные реакции в точках M и N:
Расчёт направляющих
Рассчитаем длину направляющей для горизонтального звена, расчетная схема которого представлена на рис. 21:
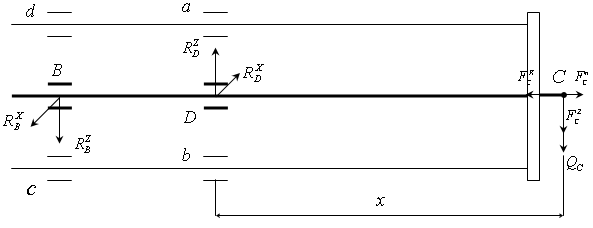
Рис. 21. Расчётная схема горизонтальных направляющих
Определим суммарные реакции в точках a, b, c, d:
Расчет будем вести по наиболее нагруженной направляющей (а и b):
для них будет х = 0,12 м; m = 0,1.
Длину направляющей определим по формуле:
принимаем 
Рассчитаем длину направляющей для горизонтального звена, расчетная схема которого представлена на рис. 22:

Рис. 22. Расчётная схема вертикальных направляющих
Определим значение силы F:
Определим суммарные реакции в точках e, f, g, h:

Расчет будем вести по наиболее нагруженной направляющей (g и h):
для них будет х = 0,04 м; m = 0,1.

Длина направляющей:
принимаем 
Расчёт подшипников
Для расчета подшипников в модуле поворота воспользуемся расчетной схемой, показанной на рис. 23:
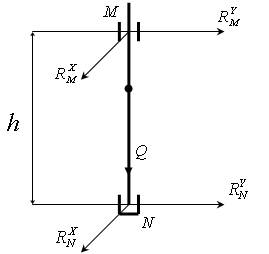
Рис. 23. Расчётная схема подшипников в модуле поворота
Данные, необходимые для расчета:
h = 0,4 м; Q = 87 Н;
суммарные радиальные нагрузки Fr1 = 124,8 H; Fr2 = 37,8 H.
Осевые составляющие радиальных усилий шариковых радиально-упорных подшипников найдем по формулам [3]:
где е = 0,68 – коэффициент осевого нагружения для подшипников с a = 260.
В этом случае: S1 > S2; FA = Q > S1 – S2 , тогда:
Рассмотрим «верхний» подшипник:

значит, осевую нагрузку не учитываем.
Эквивалентная нагрузка определится по формуле:
 ,
,
где V = 1 – при вращении внутреннего кольца;
ks = 1,2 – коэффициент безопасности;
kT = 1 – температурный коэффициент.
 .
.
Рассмотрим «нижний» подшипник:
значит осевую нагрузку учитываем.
Эквивалентная нагрузка определится по формуле:
 ,
,
где х = 0,41 – коэффициент радиального нагружения;
у = 0,87 – коэффициент осевого нагружения.
 .
.
Выбираем «верхний» подшипник 36204 с динамической грузоподъемностью С = 15,7 кН.
Из конструктивных соображений выбираем «нижний» подшипник 36204 с динамической грузоподъемностью С = 15,7 кН.
Расчетные долговечности определим по наиболее нагруженному «верхнему» подшипнику:
Расчетная долговечность (млн.об) определится по формуле:

Расчетная долговечность (в часах) определится по формуле:
 (4.3.3)
(4.3.3)
где n = 16,67 об/мин – максимальная частота вращения подшипника.
 .
.
РАСЧЁТ И ВЫБОР ПРИВОДОВ
Дата добавления: 2020-04-25; просмотров: 480; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!