Анализ существующих конструкций манипуляционных механизмов промышленных роботов
Содержание
Задание…………………………………………………………………………….2
Введение…………………………………………………………………………..3
1. Выбор структуры манипулятора…………………………………………...4
1.1. Анализ существующих конструкций манипуляционных механизмов промышленных роботов………………………………………………………….4
1.2. Выбор структуры проектируемого манипулятора…………………………5
2. Предварительный расчёт звеньев манипулятора………………………..6
2.1. Определение величины деформации………………………………………..6
2.2. Выбор геометрических характеристик сечений…………………………..8
3. Кинематический расчёт манипулятора…………………………………..10
3.1. Расчёт модуля выдвижения руки…………………………………………..10
3.2. Расчёт модуля подъёма……………………………………………………..12
3.3. Расчёт модуля поворота…………………………………………………….14
4. Силовой расчёт манипулятора…………………………………………….16
4.1. Силовой расчёт модулей манипулятора…………………………………...16
4.2. Расчёт направляющих………………………………………………………24
4.3. Расчёт подшипников………………………………………………………..26
5. Расчёт и выбор приводов…………………………………………………...28
5.1. Расчёт привода механизма поворота………………………………………28
5.2. Расчёт привода выдвижения руки…………………………………………30
5.3. Расчёт привода подъёма манипулятора…………………………………...31
6. Проверочный расчёт манипулятора……………………………………...32
|
|
|
Заключение……………………………………………………………………...33
Список использованной литературы………………………………………..34
ЗАДАНИЕ
Спроектировать манипулятор промышленного робота для загрузки пресса со следующими характеристиками:
Номинальная грузоподъёмность 5 кг
Число рук одна
Погрешность позиционирования  0,1 мм
0,1 мм
Максимальный радиус зоны обслуживания 250 мм
Форма заготовки цилиндрическая
Положение днища в исходной позиции горизонтальное
Уравнения движений звеньев при разгоне и торможении

Уравнения движений звеньев при разгоне и торможении

Максимальные значения скоростей звеньев при движении

Величины перемещений и угла поворота

ВВЕДЕНИЕ
Курсовой проект по дисциплине «Механика манипуляционных устройств» является важным этапом в подготовке инженеров-электромехаников по специальности «Роботы и робототехнические системы», специализирующиеся в вопросах создания, эксплуатации и ремонта автоматических манипуляторов и роботизированных технологических комплексов.
|
|
|
Проект является творческой работой, в которой студент должен применить полученные им знания по дисциплинам «Теоретическая механика», «Сопротивление материалов», «Материаловедение», «Метрология, стандартизация и сертификация», «Детали машин и основы конструирования».
Проектирование должно быть основано на использовании современных достижений робототехники и манипуляторостроения. Технические решения, применяемые при проектировании, должны быть подкреплены инженерными расчётами.
Студент несёт полную ответственность за принятые решения, правильность и точность расчётов и графического оформления. Цель курсового проектирования – развить навыки самостоятельного решения конструкторских задач по выбранной специальности; закрепить теоретические основы и методы расчёта, конструирования и создания манипуляционных устройств промышленных роботов, манипуляторов и автооператоров; выработать умение разбираться в технической и справочной литературе, принимать технически и экономически обоснованные решения.
|
|
|
В задачи курсового проекта входят: приобретение студентами знаний в области проектирования манипуляторов промышленных роботов, автооператоров многоцелевых станков с ЧПУ и манипуляционных систем, применяемых в автоматических производствах; приобретение студентами навыков в структурном, кинематическом и динамическом анализе и синтезе манипуляционных устройств, в выполнении проектно-конструкторских и расчётных работ при их создании.
Основной темой курсового проекта является проект манипулятора транспортного или операционного промышленного робота с подробной разработкой конструкции кинематических пар, звеньев механизма и элементов привода.
ВЫБОР СТРУКТУРЫ МАНИПУЛЯТОРА
Анализ существующих конструкций манипуляционных механизмов промышленных роботов
На основе анализа существующих конструкций манипуляционных механизмов промышленных роботов в качестве аналогов можно принять:
МП-9С, М20П40, FANUC M-2 iA 6H, YASKAWA MPK2F-5.
Исполнение роботов приведено на рис. 1, основные движения руки роботов – на рис. 2, технические данные занесены в таблицу 1.
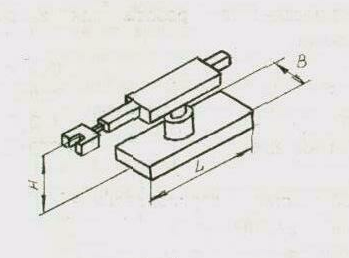

Рис. 1. Исполнение роботов Рис. 2. Основные движения руки роботов
|
|
|
Таблица 1. Технические данные напольных роботов
| Модель робота | Страна-изготовитель | Грузоподъёмность | Число степеней подвижности | Число рук | Привод | Погрешность позиционирования, ± мм | Наибольший вылет руки r, мм |
| МП-9С | СССР | 0.2 | 3 | 1 | П | 0,05 | 350 |
| М20П40 | СССР | 20 | 5 | 1 | Э | 1,0 | 1844 |
| FANUC M-2iA | Япония | 6 | 3 | 1 | П | 0,2 | 800 |
| MPK2F-5 | США | 5 | 5 | 1 | ЭП | 0,5 | 900 |
Продолжение таблицы 1
| Модель робота | Линейные перемещения, мм | Угловые перемещения, град. | Габаритные размеры, мм | Масса, кг | ||||
| Скорость, м/с | Угловая скорость, град/с | |||||||
| Z | r | ϕ | α | H | L | B | ||
| МП-9С | 
| 
| 
| - | 254 | 240 | 190 | 25 |
| М20П40 | 
| 
| 
| 
| 2359 | 700 | 650 | 570 |
| FANUC M-2iA | 650 | 
| 
| 1830 | - | 800 | 600 | 115 |
| MPK2F-5 | - | - | 
| 
| 870 | 510 | 330 | 72 |
На основании анализа выбираем структурную схему проектируемого манипулятора (рис. 3).
Дата добавления: 2020-04-25; просмотров: 299; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!