Пряма та зворотна геодезичні задачі на площині.
Ці задачі є головними геодезичними задачами, які є базою всіх геодезичних побудов та обчислень.
ПГЗ полягає у визначенні координат кінцевої точки відрізка прямої за його довжиною, напрямком та координатами початкової точки.
Х2=Х1+∆Х
У2=У1+∆У
∆Х=d1-2 cos α1-2
∆Y=d1-2 sin α1-2
ЗГЗ полягає у визначенні довжини і напрямку відрізка прямої за даними координатами початкової і кінцевої точки.
α=arctg(Y2-Y1)/( X2-X1)
d1-2=(Y2-Y1)/sin α1-2 = (X2-X1)/cos α1-2
d1-2=√(Y2 –Y1)2+(X2 –X1)2
Геодезичні мережі.
Геодезичні мережі - це мережа точок, закріплених на земній поверхні, положення яких визначено в загальній для них системі геодезичних координат.
Класифікація ГМ проводиться за наступними ознаками:
а) за територіальною ознакою:
- глобальна ГМ, що покриває територію всієї земної кулі;
- національні (державні) ГМ, що створені в межах окремої території (країни) в єдиній системі координат, прийнятій для даної країни;
- мережі згущення, що створені для збільшення щільності геодезичних пунктів (кількості пунктів на одиницю площі);
- зйомочні мережі, що створюються для подальшого згущення геодезичних пунктів і для безпосереднього використання їх при виконанні топографічних зйомок;
- спеціальні мережі, що створюються для виконання різних інженерних задач у місцевій системі координат (при необхідності можуть визначатись у державній системі координат);
б) за геометричною суттю ГМ поділяються на:
- планові (обчислення координат пунктів на прийнятій поверхні відносності (еліпсоїді, площині));
- висотні (обчислюються висоти пунктів відносно відлікової поверхні, наприклад рівня Балтійського моря);
- просторові (обчислюються координати пунктів в тривимірному просторі);
в) за точністю (вид вимірювань: лінійні, кутові (″), перевищення (мм на 1 км)):
- високоточні (1/1000000-1/100000, 0,3-1, 0,5-5мм(випадкові) і 0,05-1,0мм(систематичні));
- точні (1/100000-1/5000, 3-10, 10-25мм випадкові);
- малоточні (1/5000-1/200, 10-60, 25мм і більше).
Сутність супутникового методу визначення положення точок,сегменти системи GPS ,та їх технологічне призначення при GPS вимірювання.
На сучасному етапі в світі експлуатуються дві системи другого покоління супутникових радіонавігаційних систем:
- GPS ( Global Position System - глобальна система визначення місцеположення), яка розробляється і підтримується США;
- ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система – глобальна навігаційна супутникова система), розробка і перші етапи створення якої зроблені в СРСР, і яка тепер підтримується Росією.
Існує два способи визначення місцеположення за допомогою супутникових систем:
- абсолютний;
- відносний (диференційний).
При визначені абсолютного положення координати антени приймача отримують в єдиній системі координат, що прийнята в навігаційній системі. У цьому випадку використовують тільки один приймач, який встановлюють на пункті і впродовж достатнього проміжку часу ведуть відповідні спостереження.
Точність визначення абсолютних координат в основному визначається похибками, які залежать від роботи пристроїв, що передають сигнали з супутників, стану зовнішнього середовища у зоні розповсюдження радіохвиль, способів обробки сигналу приймачем. Немалий вплив мають похибки координат супутників, а також взаємне розташування супутників і антени приймача в момент проведення спостережень. Тому найкраща точність при абсолютному визначенні, яка досягається при непорушному приймачі і навіть при багатоденних безперервних спостереженнях, складає 3-5 м. Це, зрозуміло, недостатньо для геодезичних цілей. З цієї причини у геодезичній практиці використовуються виключно відносні (диференційні) способи.
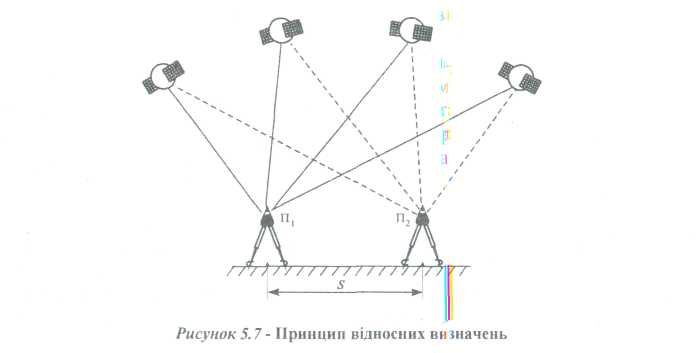 При відносних визначеннях спостереженню ведуть з застосуванням двох приймачів на двох об'єктах в співпадаючі моменти часу по одному й тому ж сузір'ю супутників (рис. 5.7). За результатами цих вимірів визначають проекції на осі геометричної системи координат базової лінії 5, яка з'єднає ці два об'єкти, відстань між об'єктами, а також кути, що характеризують напрямок базової лінії.
При відносних визначеннях спостереженню ведуть з застосуванням двох приймачів на двох об'єктах в співпадаючі моменти часу по одному й тому ж сузір'ю супутників (рис. 5.7). За результатами цих вимірів визначають проекції на осі геометричної системи координат базової лінії 5, яка з'єднає ці два об'єкти, відстань між об'єктами, а також кути, що характеризують напрямок базової лінії.
Супутникова приймальна апаратура (супутникові приймачі) призначена для роботи в режимах "Статика", "Швидка статика", "Стою/Іду", "Кінематика" і "Реокупація". При геодезичних роботах, в основному, використають статичні вимірювання (рис. 5.8). Кінематичні зйомки в режимах "Кінематика" і "Реокупація" використовують для визначення координат (траєкторії) пересувного приймача відносно іншого непорушного сенсора.
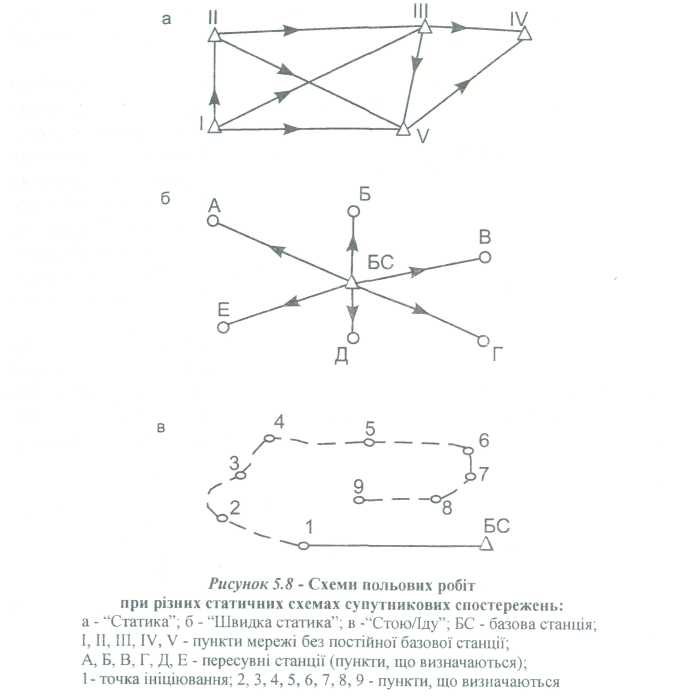 Статичні зйомки (рис. 5.8 а) передбачають виконання диференціальних супутникових спостережень між двома й більш непорушними приймачами, один з яких є базовим. За базову станцію приймається будь який пункт, координати якого відомі, або пункт із найбільшою тривалістю вимірів. Усі станції, місцеположення яких визначено відносно координат базової станції, називаються пересувними. Будь-яка з пересувних станцій, координати якої отримані з необхідною точністю, може бути використана як базова для подальшого створення мережі. Для мережі, що показана на рис. 5.8 а, спочатку базовою станцією є пункт І. Відносно нього визначаються положення пунктів II, III, V. Далі, відносно пункту II визначають пункти III, V, потім від пункту III - пункти IV та V, і в кінці, відносно пункту IV визначають положення пункту V. Таким чином постійна базова станція для всієї мережі в цілому не обов'язкова. Статичні зйомки виконують при великих відстанях (сторони понад 10 км) при спостереженні чотирьох й більше супутників. Для забезпечення паспортної точності необхідно, як мінімум, одна година спостережень.
Статичні зйомки (рис. 5.8 а) передбачають виконання диференціальних супутникових спостережень між двома й більш непорушними приймачами, один з яких є базовим. За базову станцію приймається будь який пункт, координати якого відомі, або пункт із найбільшою тривалістю вимірів. Усі станції, місцеположення яких визначено відносно координат базової станції, називаються пересувними. Будь-яка з пересувних станцій, координати якої отримані з необхідною точністю, може бути використана як базова для подальшого створення мережі. Для мережі, що показана на рис. 5.8 а, спочатку базовою станцією є пункт І. Відносно нього визначаються положення пунктів II, III, V. Далі, відносно пункту II визначають пункти III, V, потім від пункту III - пункти IV та V, і в кінці, відносно пункту IV визначають положення пункту V. Таким чином постійна базова станція для всієї мережі в цілому не обов'язкова. Статичні зйомки виконують при великих відстанях (сторони понад 10 км) при спостереженні чотирьох й більше супутників. Для забезпечення паспортної точності необхідно, як мінімум, одна година спостережень.
Швидкі статичні зйомки (рис. 5.8 б) збільшують продуктивність вимірів. На коротких лініях (до 2-5 км), при спостереженні, як мінімум, чотирьох - п'яти супутників з вигідним взаємним геометричним положенням отримання паспортної точності досягається при тривалості спостережень 5-Ю хвилин.
Зйомка в режимі "Стою/Іду" (рис. 5.8 в) дозволяє визначити велику кількість пунктів (до 50-70-ти за зміну), але вимагає, щоб приймач утримував захват супутників на протязі всього часу вимірювань, тобто при послідовному переміщенні між пунктами 1,2, ... ,9. На першому пункті (пункт 1) - пункті ініціювання необхідно знаходитися не менше 10 хвилин; час вимірів на інших пунктах, що визначаються, складає від 5 до 30
сек. Означений режим відповідає зйомці об'єктів з відстанями між пунктами не більше 300 м і при відсутності перешкод для проходження радіосигналів від супутників.
Супутникові методи визначення місцеположення останнім часом знаходять широке використання при побудові геодезичних мереж, геодезичних зйомках, при роботі на геодинамічних полігонах, де спостерігаються сучасні рухи земної поверхні, а також при вирішенні різноманітних інженерно-геодезичних задач.
Дата добавления: 2019-03-09; просмотров: 514; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!