Практическое занятие № 3: «Критерии устойчивости САУ » - 4 часа
Цель занятия
Получить практические навыки определения устойчивости САУ с помощью критериев устойчивости.
Краткие теоретические сведения
Вывод об устойчивости реальных систем необходимо делать на основе анализа исходного нелинейного уравнения и для определения неустойчивости или устойчивости системы будет достаточно выявить положительность (отрицательность) действительных корней характеристического уравнения.
Критериями устойчивости называют определенные правила, по которым в теории автоматического управления определяют знаки корней характеристического уравнения, не решая его. Различают алгебраические и частотные критерии устойчивости.
Алгебраическими критериями устойчивости системыназывают необходимое и достаточное условие отрицательности корней при определенных значениях коэффициентов в характеристическом уравнении.
Частотными критериями устойчивости системы установлена зависимость устойчивости системы от формы частотных характеристик системы.
3.3. Пример решения
Дан ПИ-регулятор с передаточной функцией вида Wp = 2 +  и объект управления, описываемый дифференциальным уравнением
и объект управления, описываемый дифференциальным уравнением
 .
.
Определяется передаточная функция объекта:
 .
.
Тогда передаточная функция разомкнутой системы имеет вид:
 .
.
Характеристический полином замкнутой системы:
D(s) = A(s) + B(s) = 2s4 + 3s3 + s2 + 2s3 + 9s2 + 6s + 1 = 2s4 + 5s3 + 10s2 + 6s + 1.
|
|
|
Передаточные функции замкнутой системы:
 - по заданию,
- по заданию,
 - по ошибке,
- по ошибке,
 - по возмущению.
- по возмущению.
|
Кз = Фз(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
Устойчивость САУ определяется по критерию Гурвица.
Поскольку коэффициенты характеристического полинома а4 = 2, а3 = 5, а2 = 10, а1 = 6, а0 = 1 (степень полинома n = 4), то матрица Гурвица имеет вид:
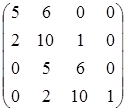
(обратите внимание на сходство строк матрицы: 1 с 3 и 2 с 4). Определители:
Δ1 = 5 > 0,
 ,
,

Δ4 = 1* Δ3 = 1*209 > 0.
Поскольку все определители положительны, то САУ устойчива.
3.4. Задание : (решение задач)
Общее задание.
 |
Дана одноконтурная АСР, для которой определена передаточная функция регулятора (Р) с настройками и дифференциальное уравнение объекта управления (ОУ).
Требуется определить:
- передаточную функцию разомкнутой системы W∞(s),
- характеристическое выражение замкнутой системы (ХВЗС),
- передаточные функции замкнутой системы Фз(s) – по заданию,
Фв(s) – по возмущению, ФЕ(s) – по ошибке,
|
|
|
- коэффициенты усиления АСР,
- устойчивость системы.
Варианты заданий:
Вариант № 1
Р - ПИ-регулятор с ПФ вида Wp = 4 +  ;
;
дифференциальное уравнение ОУ:  .
.
Вариант № 2
Р - ПИ-регулятор с ПФ вида Wp = 5 +  ;
;
дифференциальное уравнение ОУ:  .
.
Вариант № 3
Р - П-регулятор с ПФ вида Wp = 0,5;
дифференциальное уравнение ОУ:  .
.
Вариант № 4
Р - ПИ-регулятор с ПФ вида Wp = 2 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 5
Р - ПИ-регулятор с ПФ вида Wp = 1 +  ;
;
дифференциальное уравнение ОУ:  .
.
Вариант № 6
Р - П-регулятор с ПФ вида Wp = 4;
дифференциальное уравнение ОУ:  .
.
Вариант № 7
Р - ПИ-регулятор с ПФ вида Wp = 5 +  ;
;
дифференциальное уравнение ОУ:  .
.
Вариант № 8
Р - П-регулятор с ПФ вида Wp = 8;
дифференциальное уравнение ОУ:  .
.
Вариант № 9
Р - ПИ-регулятор с ПФ вида Wp = 4 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 10
Р - И-регулятор с ПФ вида Wp =  ;
;
дифференциальное уравнение ОУ:  .
.
Вариант № 11
Р - ПИ-регулятор с ПФ вида Wp = 1 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 12
Р - ПИ-регулятор с ПФ вида Wp = 1 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 13
Р - ПИ-регулятор с ПФ вида Wp = 5 + ;
дифференциальное уравнение ОУ:  .
.
|
|
|
Вариант № 14
Р - ПИ-регулятор с ПФ вида Wp = 1 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 15
Р - И-регулятор с ПФ вида Wp = ;
дифференциальное уравнение ОУ:  .
.
Вариант № 16
Р - ПИ-регулятор с ПФ вида Wp = 1 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 17
Р - ПИ-регулятор с ПФ вида Wp = 1 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 18
Р - П-регулятор с ПФ вида Wp = 2;
дифференциальное уравнение ОУ:  .
.
Вариант № 19
Р - П-регулятор с ПФ вида Wp = 4;
дифференциальное уравнение ОУ:  .
.
Вариант № 20
Р - И-регулятор с ПФ вида Wp = ;
дифференциальное уравнение ОУ:  .
.
Вариант № 21
Р - ПИ-регулятор с ПФ вида Wp = 2 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 22
Р - ПИ-регулятор с ПФ вида Wp = 1 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 23
Р - ПИ-регулятор с ПФ вида Wp = 0,5 + ;
дифференциальное уравнение ОУ:  .
.
Вариант № 24
Р - П-регулятор с ПФ вида Wp = 0,1;
дифференциальное уравнение ОУ:  .
.
Контрольные вопросы
1. Понятие об устойчивости САУ. Необходимое и достаточное условие устойчивости.
2. Определение понятия устойчивости по Ляпунову.
3. Теорема Ляпунова.
4. Понятие о критериях устойчивости. Виды критериев.
|
|
|
5. Критерии устойчивости Гурвица, Рауса.
6. Критерий устойчивости Михайлова.
7. Критерий устойчивости Найквиста. Запасы устойчивости по амплитуде и фазе.
8. Логарифмический частотный критерий устойчивости. Определение по ЛЧХ запасов устойчивости по амплитуде и фазе.
Дата добавления: 2018-09-23; просмотров: 1156; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!