БИНС с одним уравнением Пуассона
Рассмотрим другой способ определения параметров ориентации. Обратимся к дифференциальному уравнению
 .
.
Подставляя

получим

откуда
 .
.
Используя  , получим
, получим

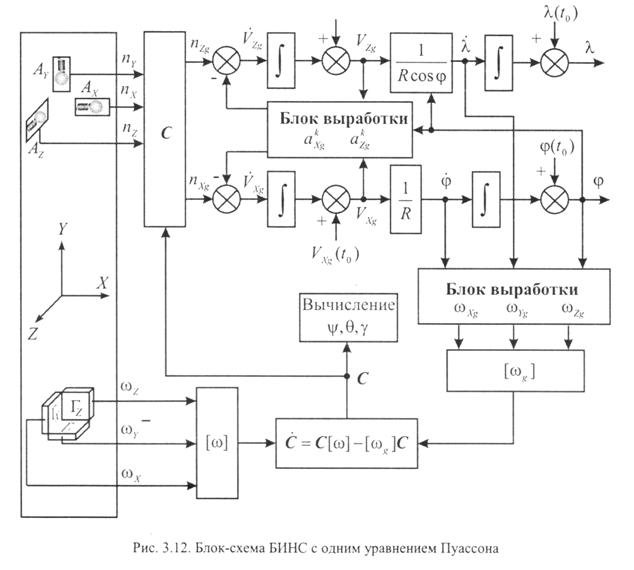
Таким образом, для получения матрицы ориентации достаточно решить это одно дифференциальное уравнение, получившее название обобщенного уравнения Пуассона.
Блок –схема алгоритма БИНС для этого случая показана на рисунке
БИНС с параметрами Родрига-Гамильтона
Эффективным средством повышения точности и экономичности является использование параметров Родрига-Гамильтона. При одинаковой точности использование этих параметров дает экономию в объеме вычислений в среднем на  .
.
Ось конечного поворота.
Рассмотрим понятие оси конечного поворота.
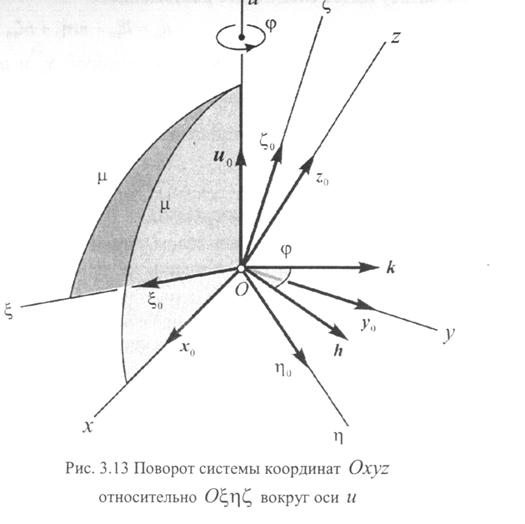
Пусть система координат  поворачивается относительно неподвижной системы координат
поворачивается относительно неподвижной системы координат  на произвольный угол
на произвольный угол  вокруг некоторой оси
вокруг некоторой оси  , называемой осью конечного поворота.
, называемой осью конечного поворота.
Обозначим через  косинусы углов, которые образует ось с осями системы координат . Очевидно, что эти величины являются косинусами углов и с осями системы координат ( см. Рисунок)
косинусы углов, которые образует ось с осями системы координат . Очевидно, что эти величины являются косинусами углов и с осями системы координат ( см. Рисунок)
 ,
,
 ,
,
 .
.
В частности имеем

где  -угол, который образует ось вращения и с осью
-угол, который образует ось вращения и с осью  и с осью
и с осью  системы координат
системы координат  .
.
Обозначим направляющие косинусы оси относительно системы координат соответственно через  .
.
 ,
,  ,
,  .
.
Направляющие косинусы удовлетворяют уравнению
|
|
|
 .
.
Выразим направляющие косинусы оси через направляющие косинусы оси конечного поворота и угол поворота .
Очевидно, что проекция единичного вектора  оси на оси системы координат равны . Тогда разложение этого вектора по базису имеет вид
оси на оси системы координат равны . Тогда разложение этого вектора по базису имеет вид
 .
.
В свою очередь, разложение вектора  по этому базису имеет вид
по этому базису имеет вид
 .
.
Найдем скалярное произведение векторов и

или с учетом того, что
 .
.
Для определения трех искомых величин кроме этого уравнения и уравнения
требуется еще одно уравнение. Для вывода этого уравнения воспользуемся тем обстоятельством, что плоскость  повернута относительно плоскости
повернута относительно плоскости  на угол . Так как двугранный угол измеряется углом между перпендикулярами к образующим его плоскостям то введем два вектора
на угол . Так как двугранный угол измеряется углом между перпендикулярами к образующим его плоскостям то введем два вектора  и
и  первый из которых перпендикулярен плоскости , а второй плоскости . (См. Рисунок)
первый из которых перпендикулярен плоскости , а второй плоскости . (См. Рисунок)
Согласно свойству скалярного произведения двух векторов имеем
 ,
,
где  -проекции на оси вектора ,
-проекции на оси вектора ,  -проекции на те же оси вектора .
-проекции на те же оси вектора .
В качестве вектора возьмем векторное произведение единичных векторов и 
 .
.
Как следствие,
 ,
,  ,
,  .
.
В качестве вектора возьмем векторное произведение и

Раскрывая определитель, получим
 ,
,  ,
,  .
.
Модули векторных произведений (*) и (**) одинаковы и равны синусу угла между осями и или , что то же самое, между осями и ( см. Рисунок). Таким образом, будем иметь
|
|
|
 .
.
С учетом найденных проекций уравнение
примет вид
 (***)
(***)
которое и является третьим уравнением для определения .
Так как
то
 и из
и из 
вытекает равенство
 .
.
Тогда уравнение (***) примет вид

и после несложных преобразований получаем
 .
.
Для определения величины  используем уравнение
используем уравнение
из которого исключаем найденное значение  и значение
и значение  с учетом уравнения
с учетом уравнения
. (*)
Получим квадратное уравнение

Из двух корней этого уравнения
 ,
, 
используется первое
Используя полученные значения и из (*) можно найти
 .
.
Аналогично определяются косинусы углов между осью  и осями
и осями  и далее между осью
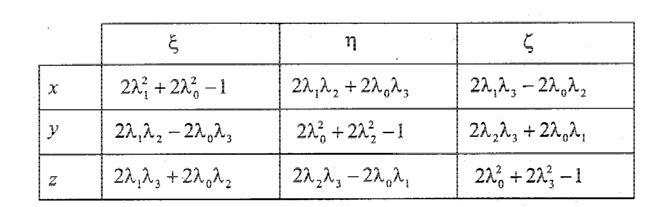
и далее между осью  и осями . В итоге таблица косинусов между осями примет вид
и осями . В итоге таблица косинусов между осями примет вид
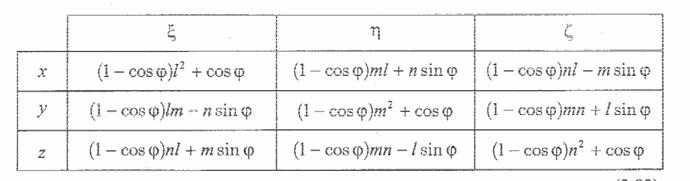
В этой таблице величины -косинусы углов, которая образует ось поворота с осями , а также с осями .
Параметры Родрига-Гамильтона
Каждому повороту тела на угол вокруг оси с направляющими косинусами заданными относительно исходной системы координат ставятся в соответствие четыре числа, называемые параметрами Родрига –Гамильтона:
|
|
|
 ,
,  ,
,  ,
,  .
.
Параметры Родрига –Гамильтона связаны между собой очевидным соотношением

Учитывая, что
 ,
,  ,
,
элемент (1,1) таблицы может быть представлен в виде
 .
.
Учитывая, что
элемент (1,2) таблицы будет равен

Рассчитывая элементы таблицы аналогичным образом можно получить таблицу
Если, например вместо осей использовать оси географической системы координат  , а вместо
, а вместо  -оси связанной системы координат , то полученная матрица будет аналогом матрицы направляющих косинусов
-оси связанной системы координат , то полученная матрица будет аналогом матрицы направляющих косинусов

Таким образом, взаимное положение двух систем координат помимо трех углов Эйлера-Крылова, девяти направляющих косинусов, можно определить с помощью четырех параметров Родрига- Гамильтона.
Кватернионы
Определенные удобства в вычислении параметров Родрига- Гамильтона дают кватернионы-гиперкомплексные числа вида

с одной действительной и тремя мнимыми единицами.
Величины  и
и  называют соответственно скалярной и векторными составляющими кватернионов и обозначаются
называют соответственно скалярной и векторными составляющими кватернионов и обозначаются
 ,
,
 .
.
Следовательно кватернион можно представить в виде
 .
.
Кватернион сопряженный данному кватерниону определяется выражением
|
|
|
 .
.
Кватернион можно рассматривать как вектор в четырехмерном пространстве длина которого называется тензором или модулем кватерниона
 .
.
Дата добавления: 2018-04-05; просмотров: 1345; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!