Выбором шага интегрирования (Rkadapt)
Функция Rkadaptвозвращает матрицуS1размерности(n+1)*m значений решения системыn- уравнений вm- точках интервала интегрирования методом Рунге-Кутта с автоматическим выбором шага изменения аргумента. Уравнения заданы вектором правых частей (производных) уравненийD(t,Y)и начальными условиями, определёнными векторомY0.
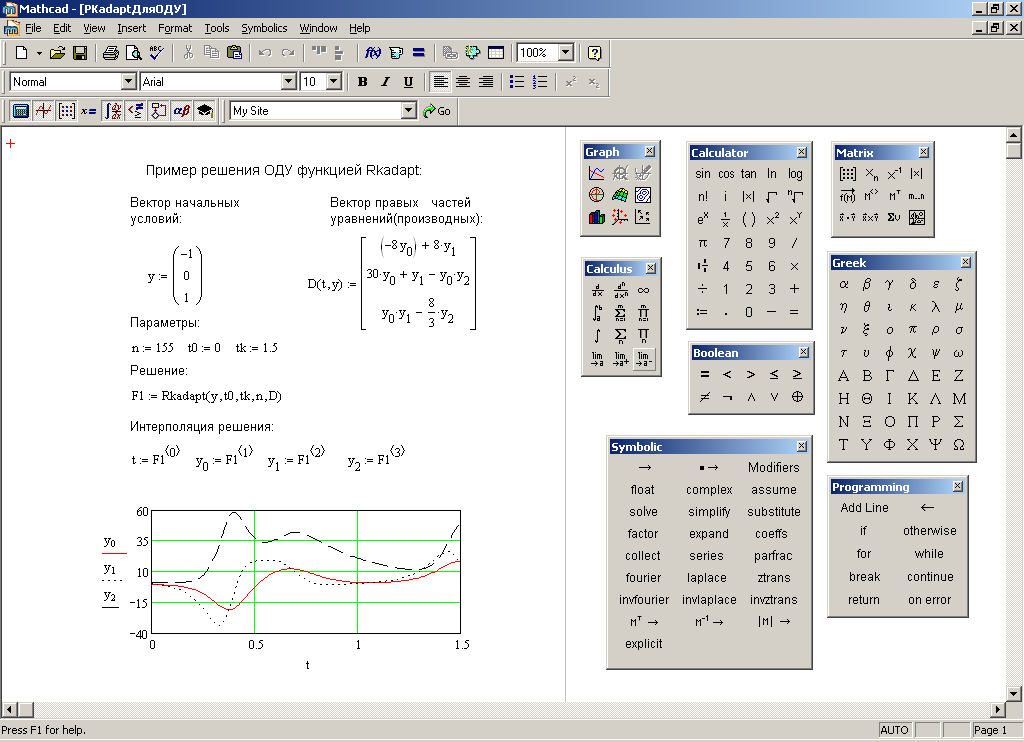
Рис. 5. Решение системы ОДУ методом Рунге-Кутта
с автоматическим выбором шага интегрирования (функция Rkadapt).
Обращение к функции имеет вид: Rkadapt(Y0, t1, t2, m, D), гдеm- число точек, в которых отыскивается решение.
Результат решения выводится в виде матрицы, поэтому для дальнейшего использования, например для построения графиков решения, его необходимо преобразовать в систему функций. На рис. 5 приведен пример решения системы ОДУ функцией Rkadaptcвыводом решения в виде системы графиков. Для этого матрица решения так же должна быть интерполирована системой функций (см. формулы 3).
Решение системы ОДУ методом Булирша – Штера
(функция Bulstoer)
В общем случае интегрирования системы уравнений с переменным шагом обращение к функции имеет вид: bulstoer(Y, t0, t1, m, D, kmax, s),
где Y - вектор начальных условий;
t0, t1- начальная и конечная точки интервала интегрирования;
m- число шагов интегрирования;
Y- вектор правых частей(производных) уравнений;
kmax- максимальное число промежуточных точек интегрирования;
s- минимальный интервал (шаг) между промежуточными точками.
|
|
|
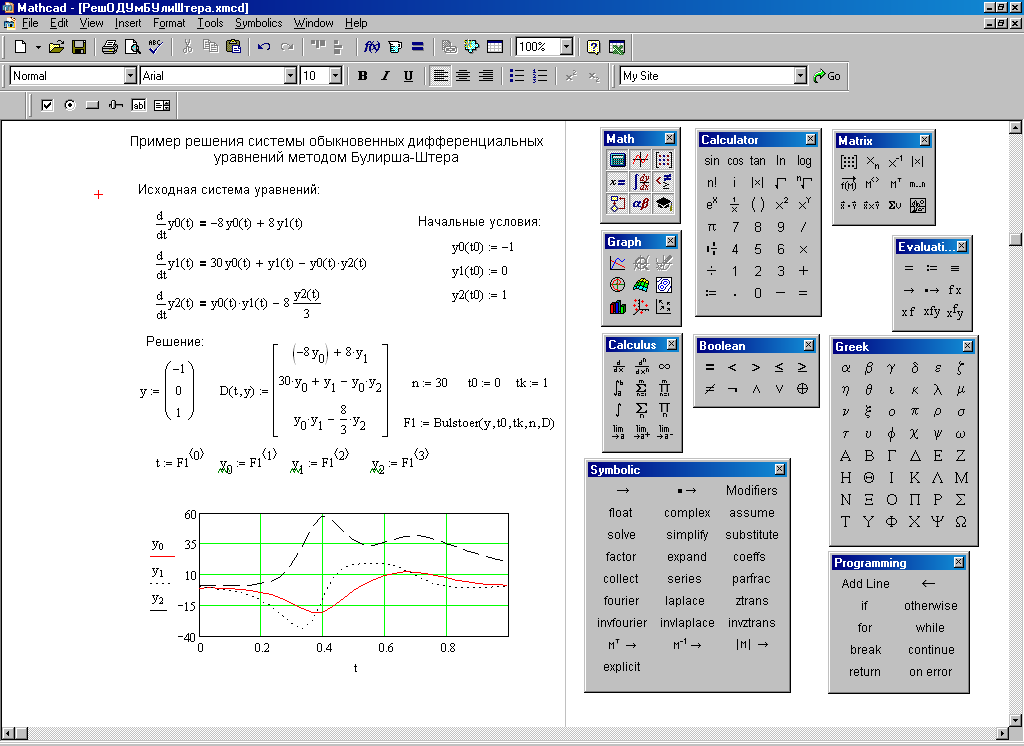
Рис. 6. Пример решения системы ОДУ с использованием функции Bulstoer
с фиксированным шагом интегрирования
Если используется метод решения с постоянным шагом, то обращение к функции упрощается и имеет вид: bulstoer(Y, t0, t1, m, D).
Как и в случае применения методов Рунге-Кутта решение системы уравнений выводится в матричной форме, поэтому оно должно быть интерполировано для последующего использования в вычислительном процессе.
Пример применения метода Bulirsch–Stoer’а для решения системы ОДУ приведен на рис.6. Для сравнения методов в качестве примера рассмотрена та же система уравнений, что и на рис. 5.
Решение системы ОДУ методом Розенброка (функция Radau)
Если система дифференциальных уравнений записана в матричной форме, а коэффициенты при неизвестных функциях значительно, например, на несколько порядков величины, отличаются друг от друга, то такую матрицу называют вырожденной, а систему уравнений «жёсткой».
Решение «жёсткой» системы уравнений методом Рунге – Кутта приводит к необходимости уменьшения (измельчения) шага интегрирования, что в свою очередь приводит к накоплению ошибок интегрирования, и как следствие, к неустойчивости решения. Поэтому для решения таких систем разработан специальный алгоритм, названный по имени его автора, методом Розенброка. Метод позволяет получить решение как «жёстких» обыкновенных дифференциальных уравнений одной переменной, так и систем уравнений. В MathCadэтот алгоритм реализуется функциейRadau.
|
|
|
В общем случае обращение к функции имеет вид: Radau(y, x1, x2, num, D, kmax, s), в котором аргументы:y, x1, x2,num,D,kmax,s,имеют тот же смысл, что и в рассмотренных выше решающих функциях. В частном случае фиксированного шага интегрирования обращение к функции упрощается -Radau(y, x1, x2, num, D).
На рис.7 приведен пример решения системы ОДУ, элементы матрицы которой отличаются примерно на четыре порядка.
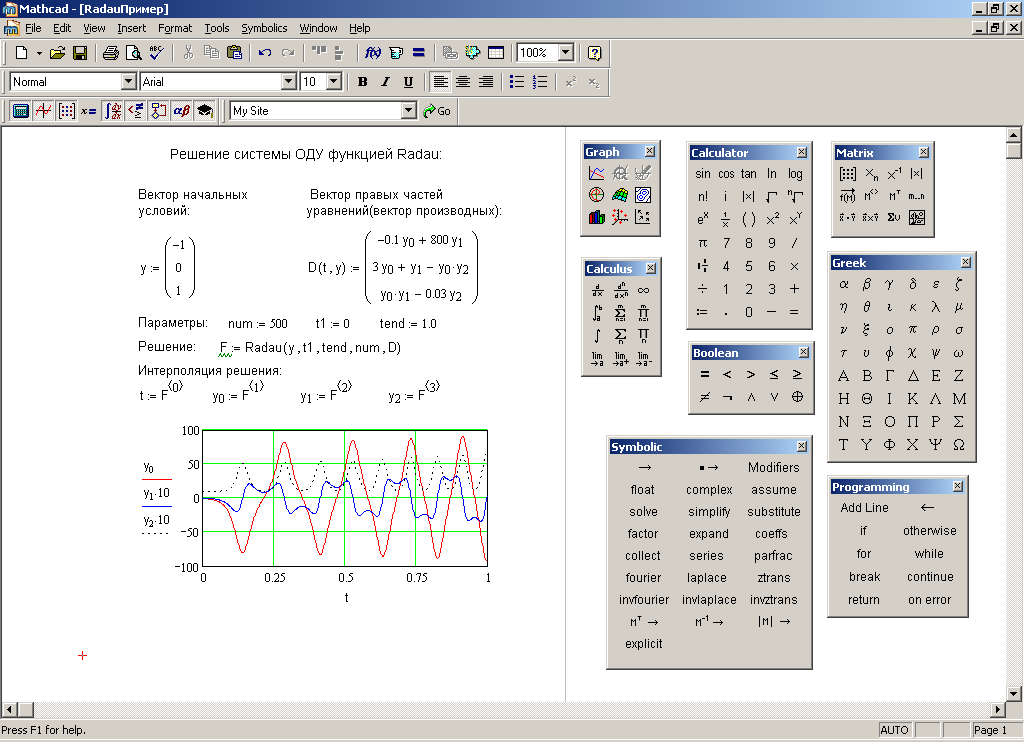
Рис. 7. Пример решения системы ОДУ функцией Radau
Дата добавления: 2018-04-05; просмотров: 506; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!