Управляющий автомат Мура
Автомат Мура отличается от Мили тем, что он описывается формулами Y=ƒ1(T), D=ƒ2(X,T). Т.е. его выходные сигналы зависят только от состояния триггеров. Поэтому его КС фактически распадается на 2 независимые КС – рис. 3.
Рис. 3 Структура автомата Мура
КС1 реализует функцию D=ƒ2(X,T), а КС2 - Y=ƒ1(T).
Построим автомат Мура для того же примера:
| Сост. | x1 | x2 | y1 | y2 | y3 | y4 |
Сразу отметим, что состояния 2 и 5 для Мура полностью эквивалентны, т.к. они генерируют идентичные наборы выходных сигналов. Поэтому состояние 5 можно выбросить и добавить дополнительный переход из состояния 2 по сигналам x1x2=01 в состояние 0. Это действие заменит выброшенное 5-е состояние в плане переходов.
Исключение эквивалентных состояний в общем случае может сократить число триггеров автомата.
ТИ для КС1 (таблица переходов автомата):
| Сост. | T1 | T2 | T3 | X1 | x2 | D1 | D2 | D3 |
| 2a | ||||||||
| 2b (5) | ||||||||
Правила кодирования состояний те же, что и автомате Мили.
|
|
|
Коды состояний 001, 100, 101 и сочетание входных сигналов x1x2=10 не используются, это можно учитывать при минимизации.
Обратите внимание, что в таблице 2 строки, соответствующие состоянию 2. Строка 2b соответствует выброшенному состоянию 5. Видно, что из неё автомат переходит в состояние 0.
Получим минимальные формулы сигналов D1, D2 и D3 КС1:
Карта Карно для сигнала X1 – рис 4.
Рис 4. Карта Карно для сигнала X1.
Из карты следует, что D1 = x1. Это же видно из ТИ.
Аналогично:
D2 = x1 + T2 + T1 T2 T3 x2
D3 = T1 T2 T3 x2 + T2 + T1 T2 T3 x1
ТИ для КС2 автомата:
| Сост. | T1 | T2 | T3 | y1 | y2 | y3 | y4 |
Сигналы:
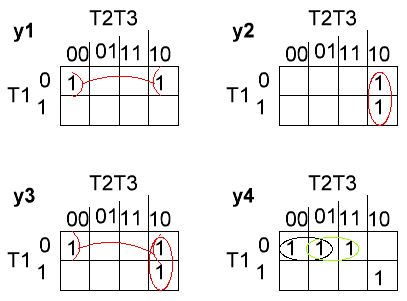
Рис.5 Карты Карно для сигналов y1-y4

Из анализа формул видно, что y3 и y4 можно формировать, используя уже готовые y1 и y2. Это может дополнительно упростить КС2, но на практике такое решение снижает нагрузочную способность схемы на выходах y1 и y2.
Также, можно упростить реальную схему, если в каком-то смысле объединять схемы КС1 и КС2, формируя общие для них внутренние сигналы (например, T1 T3) и использовать их одновременно в обоих схемах. Конечно, обращая внимание на длину получаемых цепочек элементов и на их быстродействие (при увеличении длины цепочки падает её быстродействие).
|
|
|
Даже несмотря на то, что при рассмотрении автомата Мили мы не минимизировали его формулы, можно заметить, что автомат Мура проще уже потому, что для формирования Y не нужны сигналы X.
Дата добавления: 2016-01-05; просмотров: 17; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!