В редукторі поперечної подачі подачі верстата 6Р13Ф3-37.
Верстата 6Р13Ф3-37 .
Розріз редуктора поздовжньої подачі показано на (рис. 11.5.). Від двигуна 6 рух передається гвинту кочення 1 через зубчасту передачу 2-3. Трансформатор 7 пов'язаний з валом двигуна через зубчасті колеса 4-5. Змазування редуктора здійснюється розбризкуванням.
Багатоцільові фрезерні верстати з ЧПК моделі 234ВМФ2,
ИР500ПМФ4 .
Багатоцільовий свердлильно – фрезерно - розточний напівавтомат з ЧПК моделі 234ВМФ2.
Верстат призначений для комплексної обробки заготовок невеликих і середніх розмірів при підході інструменту з одного боку. На верстаті можна робити свердління, зенкування, цикування, чорнове і чистове розточування, напівчистове і чистове фрезерування і нарізування різьби мітчиками. Верстат побудований на базі координатно-розточувального верстата і має клас точності В: забезпечує відхилення відстаней між осями оброблених отворів 0,016 мм, відхилення діаметра отворів 0,01 мм.
Технічна характеристика верстата. Найбільший діаметр свердління 25 мм, найбільший діаметр розточування 160 мм; розміри робочої поверхні столу (ширина  довжина) 320x560 мм; число інструментів у магазині 30; число частот обертання шпинделя 21; межі частот обертання шпинделя 40-2500 хв-1; число ступенів подач 30; межі подач за координатами X ', У, Z= 3,15-2500 мм / хв; швидкість швидкого переміщення по осях координат X', У, Z= 3000 мм / хв; габаритні розміри верстата 1590x1640x2620 мм.
довжина) 320x560 мм; число інструментів у магазині 30; число частот обертання шпинделя 21; межі частот обертання шпинделя 40-2500 хв-1; число ступенів подач 30; межі подач за координатами X ', У, Z= 3,15-2500 мм / хв; швидкість швидкого переміщення по осях координат X', У, Z= 3000 мм / хв; габаритні розміри верстата 1590x1640x2620 мм.
|
|
|
Пристрій ЧПК типу «Розмір 2М» прямокутно-позиційне. Воно забезпечує відпрацювання за програмою координатних переміщень столу, санчат, шпиндельної головки і гільзи шпинделя видає допоміжні команди на зміну інструментів, зміна режимів обробки, автоматичний зажим рухомих робочих органів та ін. Вся інформація про введеною програмою і про фактичному стані робочих органів відображається на екрані цифрової індикації. Пристрій дозволяє ввести 35 коригувань по довжині і п'ять по радіусу. Точність позиціонування 0,02 мм. Число керованих координат (усього / одночасно) 3 / 2. Для позиціонування використовується індуктивна відліковий-вимірювальна система зі зворотнім зв'язком.

Рис. 12.1. Вертикальний свердлильно – фрезерно - розточний напівавтомат 243ВМФ2 з ЧПК.
Компоновка, основні механізми та рухи у верстаті. Верстат має вертикальну компоновку. На станині 1 (рис. 12.1) закріплена стійка 2. У верхній частині стійки розміщений привід головного руху - обертання шпинделя і редуктор подач по координаті Z гільзи шпинделя. За вертикальним направляючи стійки переміщається шпиндельна головка 4 (установочне переміщення). На стійці укріплений магазин 3, з якого автооператором переносить інструмент у шпиндель. Верстат оснащений хрестовим координатним столом 5. За горизонтальними напрямними станини переміщаються в поперечному напрямку салазки (подача по координаті У), а в поздовжньому напрямку по напрямних салазок - стіл (подача по координаті X ').
|
|
|
Кінематика верстата (рис. 12.2, а). Головний рух - шпиндель VII отримує від асинхронного електродвигуна M1 (N = 2,2 кВт, n = 1430хв-1) через двох пасовий варіатор Вр, трьохступеневу коробку швидкостей і зубчасто-пасову передачу z = 31-31. При відхиленні швидкості від заданою програмою тахогенератор ТГ дасть команду на включення асинхронного електродвигуна М2 (N = 0,08 кВт, n = 1390хв-1), який через зубчасті пари z = 17-49, z = 25-49 і гвинт XIII з кроком Р = 5 мм змістить вісь рухомих дисків варіатора, що й змінить його передаточне відношення. Варіатор забезпечує регулювання швидкості (1:4) всередині кожного з трьох діапазонів, одержуваних перемиканням блоку Б1 і муфти M1. При включенні муфти M1 від електромагніту постійного струму Е1 отримують верхній діапазон частот обертання, так як рухаються з валу / / / на вал V передається через зубчасто-ремінну передачу z = 30-30, минаючи понижуючі передачі. Два нижніх діапазони шпиндель отримує при перемиканні блоку Б1 (муфта відключена) двома електромагнітами по стояв струму (на схемі не показані).
|
|
|

Рис. 12.2. Кінематична схема вертикального свердлильно –фрезерно - розточного напівавтомату 243ВМФ2 з ЧПК.
Шпиндель верстата 8 (мал.12.3) розташований у гільзі 7 на спеціальних високоточних підшипниках. Зажим інструмента відбувається від пакету тарілчастих пружин 3, що діють на інструмент за допомогою шомпола 2, сполученого з байонетним замком 1. Зусилля пружин регулюються гайкою 4. Зуб планки 5, взаємодіючи з зубчастим колесом 6, закріпленим на шомполі 2, перешкоджає випадковому провороту байонета. Крутний момент від шпинделя до інструменту передається повідцями, розташованими на торці шпинделя.
 Рис. 12.3. Шпиндель верстату 243ВМФ2.
Рис. 12.3. Шпиндель верстату 243ВМФ2.
Привід обертання шомпола призначений для розжимання і затягування байонетного замка шомпола з інструментом в крайньому верхньому положенні гільзи, а також для обертання інструменту у разі неспівпадання провідних шпонок інструмента і шпинделя під час автома тичної зміни інструменту. Привод шомпола (мал. 12.2, а) здійснюється від асинхронного електродвигуна М3 (N = 0,25 кВт, n = 2700хв-1) через черв'ячний редуктор z = 1-30 при включеній муфті М2. Двигун включається по команді мікроперемикача, розміщеного на магазині, тільки в положенні автооператора під шпинделем. Муфта М3 - запобіжна.
|
|
|
Привод подач гільзи шпинделя і переміщення шпиндельної головки здійснюється від електродвигуна постійного струму М4 (N = 0,37 кВт, n = 3000 хв'1.) Гільза отримує переміщення через двох-ступінчастий редуктор z = 20-40, z = 16-48-40-48 і гвинт кочення XVIII з кроком Р = 6 мм, котрий з'єднаний з повзуном переміщення гільзи. Для забезпечення самогальмування пари гвинт-гайка кочення при віджимі інструмента служить гальмо.
Переміщення шпиндельної головки здійснюватись від шліцьового валу XVI через втулку XIX і при включеній муфті М4 через черв'ячну пару z = 1-34 (муфта М5 запобіжна) і реєчну передачу. Муфта М4 включається від механізму затиску головки. Гільза і шпиндельні головка переміщуються синхронно. При відключенні муфти М4 шпиндельні головка зупиняється, а шпиндель продовжує переміщатися, здійснюючи робочу подачу. На валу XVII встановлений кругової фотоелектричний датчик з дискретністю 0,01 мм, який здійснює контроль переміщень гільзи і шпиндельної головки.
Швидкість швидкого переміщення шпиндельної головки визначається з вираження:
v 
Головка і гільза врівноважені противагами.
Позиціонування за заданою програмою здійснюється поздовжнім переміщенням столу і поперечним переміщенням салазок від електродвигунів постійного струму відповідно М5 і Мб (N = 0,37 кВт; n = 3000хв -1). Рух передається через зубчасті паси z = 23-49 , дві зубчасті пари на черв΄ячно - рейкові передачі з модулем m= 10 мм. Поздовжня подача столу в загальному вигляді визначиться з вираження:
Sпозд. = nдв. 
Вимірювальні гвинти відліково-вимірювальних систем кінематично пов'язані з приводними черв'яками через колесо z = 22 на приводному валу XXX поздовжнього переміщення і z = 30 на валу XXIV.
Відліково-вимірювальна система верстата замкнута з індуктивними та фотоелектричними датчиками. Розглянемо принцип її дії на прикладі відлікової системи столу (мал. 12.2 , б). Точний гвинт-якір з прямокутною різьбою XXXIII індуктивного датчика ІД пов'язаний з переміщенням робочого органу через черв΄ячно - рейкову передачу, вал XXX, конічні пари z = 22-22, z = 22-22, колеса диференціала z = 40, z = 50, z - 108 і колесо z = 106. Виникаючий при переміщенні сигнал неузгодженості сприймається блоком управління БУ, що дає команди електродвигуну М7 типу РД-09 (N = 0,01 кВт, n = 1200хв-1). Двигун, зменшуючи сигнал неузгодженості, довертає гвинт-якір XXXIII через передачу z = 34-68, диференціал і колесо г - 106 відлікового гвинта. В результаті зворотного зв'язку гвинт-якір обертається синхронно руху робочого органу. Відлік кута повороту гвинта-якоря проводиться круговим фотоелектричним датчиком ФД. Виникаючий в фотодіодах електричний струм перетвориться електронним пристроєм ЕУ в імпульси, що сприймаються лічильником імпульсів СІ. Крок імпульсів фотоелектричного датчика відповідає 0,001 мм переміщення робочого органу (дискретність відліку). Лічильник імпульсів формує в числовому вигляді повну інформацію про величину переміщення робочого органу і управляє відповідно електродвигуном М5 приводу подач стола.
Для компенсації похибок відліково-вимірювальної системи (неточність нарізки гвинта-якоря, його биття і т. д.) служить корекційний пристрій, що складається з корекційного індуктивного датчика та корекційної лінійки.
Зажим шпиндельної головки, столу, салазок і гільзи здійснюється автоматично за програмою від асинхронного електродвигуна через ряд
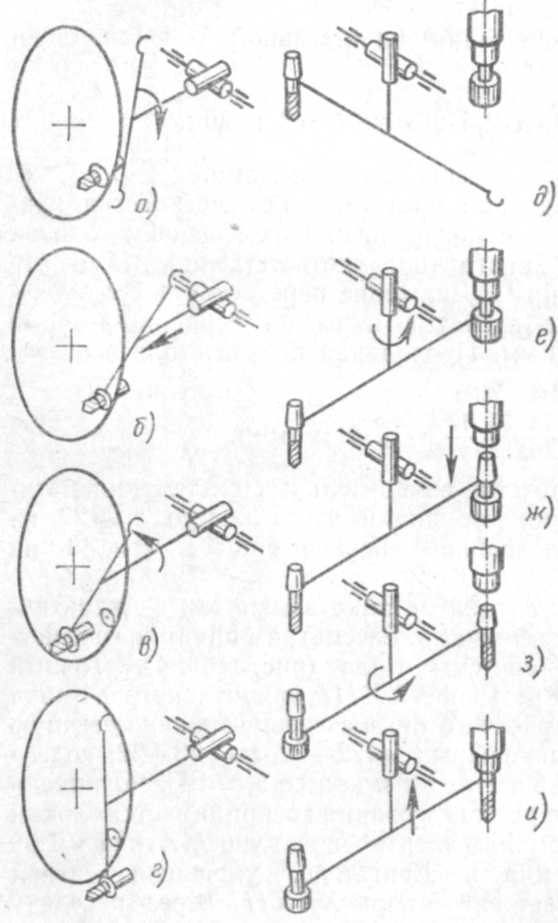
Рис. 12.4. Схема роботи автооператора на верстаті 243ВМФ2.
зубчастих передач (на схемі не показані).
Механізм автоматичної зміни інструменту складається з інструментального магазину і автооператора з приводом. Механізм зручно розташований для обслуговування, час зміни інструменту складає близько 5 с.
Цикл зміни інструмента (рис. 12.4). Магазин під час обробки подає інструмент у позицію завантаження-розвантаження. Автооператор повертається, захоплює інструмент, виносить його з магазину і перекидається до положення, коли осі шпинделя та інструменту будуть паралельні (мал. 12.4, а - д). Гільза і шпиндельна головка переміщуються в крайнє верхнє положення, контрольоване мікроперемикачами; шомпол віджимає інструмент, але він залишається поки в байонетному замку. Автооператор захоплює від працював інструмент (рис. 12.4, е), в цей момент починає обертатися шомпол та інструмент звільняється з замку, автооператором рухом вниз витягує інструмент з шпинделя. Потім автооператором повертається на 1800 і вставляє черговий інструмент в шпиндель (рис. 12.4, ж-і). Далі автооператором здійснює всі рухи в зворотній послідовності, вставляючи відпрацював інструмент у своє гніздо. Одночасно відбувається зажим нового інструменту в шпинделі. Так як шомпол обертається, то зуб інструменту западає в байонет, а провідні виступи шпинделя - в пази інструментальної оправки. Інструмент фіксується в шпинделі, а шомпол замикає байонетним замок і зупиняється. Спеціальна схема контролю перевіряє положення інструменту в шпинделі.
Магазин виконаний у вигляді барабана з втулками, в які встановлюють інструмент. Втулки оберігають хвостовики оправок від пилу і бруду. Оправки кріплять в магазині за допомогою пружин. З барабаном кінематично пов'язані три кодових диска, пелюстки яких проходять крізь прорізи безконтактних кінцевих вимикачів, закріплених на корпусі. Вихідні сигнали вимикачів, закодовані в двійково-десятковому коді, які забезпечують вибір позиції барабана, тобто кодується гніздо магазину.
Обертання магазину (див. рис. 103, в) здійснюється від електродвигуна М8 (N = 0,18 кВт, n = 2800 хв-1) через черв'ячну передачу z = 1-24, гвинт-вал XXXVII, зубчасту пару z = 51-34, передачі z = 2-30, z = 50-165 і вал XL, на якому розташований магазин. Рівняння кінематичного балансу запишемо з умови, що за один оберт гвинта-вала XXXVII магазин повернеться на 1 крок (1 / 30 обороту), так як в магазині 30 позицій:

При отриманні команди на пошук інструменту починає обертатися черв'ячне колесо z = 24 з внутрішнім різьбленням. При цьому вал XXXVII переміщується вздовж своєї осі вліво або вправо в залежності від напрямку обертання до тих пір, поки фіксатор I не вийде з повздовжнього паза кулачка К1. При цьому гвинт-вал почне переміщатися в осьовому напрямку до тих пір, поки не спрацює мікроперемикач, що дає команду на зупинку електродвигуна.
Дата добавления: 2022-01-22; просмотров: 32; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!