Мал. 3.3. Коробка передач зі змінними Мал.3.4. Коробка передач,
Зубчастими колесами. вбудована в шпиндельні бабку.

Мал.3.5. Коробка швидкостей вертикально-свердлильного верстата.
Коробка передач вертикально-свердлильного верстата показана на (мал. 3.5 ) . Частота обертання шпинделя в ній змінюється пересувними блоками зубчастих коліс. На кришці 3 корпуса коробки встановлений приводний електродвигун, з'єднаний з першим валом коробки муфтою 6. Пересувні блоки коліс 7 і 8 дають можливість повідомити гільзі2 шість (при одношвидкісному двигуні) різних значень частоти обертання. Гільза 2 має внутрішні шліци, за допомогою яких обертання передається шпинделю. Зубчасті колеса4 і 5 є змінними. Частота обертання шпинделя
nшп=nдвік.ш;
де n шп, nдв - частоти обертання шпинделя і валу електродвигуна; i к.ш- передаточне відношення коробки швидкостей.
У деяких моделях токарних, револьверних та фрезерних верстатів коробка швидкостей винесено з шпиндельної бабки, обертання шпинделю передається через пасову передачу (мал. 3.6.). Великі частоти обертання шпиндель 4 отримує від коробки швидкостей 1 через пасову передачу 2. У цьому випадку муфта 3 включена, а зубчасті колеса z2 і z3 жорстко закріплені на пустотілій втулці, шляхом осьового зміщення втулки вимкнені. Малі частоти обертання шпинделя отримують при виключенні муфті і включених зубчастих колесах z2 і z3 . У цьому випадку обертання від коробки швидкостей передається шпинделю 4 через пасову передачу 2 і зубчасті колеса z1/z2 і z3/z4. Мал.3.6. Розділений привод.
Розділений привод з розвантаженим шпинделем забезпечує більш плавне обертання шпинделя і його часто застосовують у точних верстатах.
Коробки швидкостей з електромагнітними муфтами, що дозволяють застосовувати дистанційне керування, застосовують у різних автоматах і напівавтоматах, у тому числі верстати з ЧПК. Для уніфікації приводу головного руху таких верстатів випускають уніфіковані автоматичні коробки швидкостей (АКШ) семи габаритів, розраховані на потужність від 1,5 до 55 кВт; число ступенів швидкостей від 4 до 18.
Кінематичний розрахунок коробки швидкості.
Для кінематичних розрахунків коробок швидкостей у верстатобудуванні застосовують два методи: аналітичний та графоаналітичний. Обидва методи дозволяють знаходити величини передаточних відношень передач, що входять в коробку швидкостей. Однак, як правило, використовують тільки графоаналітичний метод. Перевагою його є те , що він дозволяє швидко знаходити можливі варіанти рішення, дає більшу наочність (що полегшує порівняння варіантів). При графоаналітичному методі послідовно будують структурну сітку і графік частоти обертання.
Структурна сітка дає чітке уявлення про структуру приводу верстата. По структурній сітці легко простежити зв'язки між передаточними відношеннями групових передач (груповою передачею називають сукупність передач між двома послідовними валами коробки швидкостей); проте сітка не дає конкретних значень цих величин. Вона наочно характеризує ряд структур приводів в загальній формі. Структурна сітка містить наступні дані про привід: кількість груп передач, кількість передач в кожній групі, відносний порядок конструктивного розташування груп уздовж ланцюга передач, порядок кінематичного включення груп (тобто їх характеристики та зв'язок між передавальними відношеннями), діапазон регулювання групових передач і всього приводу, число частот обертання ведучого і веденого валів групової передачі.
Графік частоти обертання дозволяє визначити конкретні величини передаточних відношень усіх передач приводу і частоти обертання всіх його валів. Його будують відповідно до кінематичної схеми приводу. При розробці кінематичної схеми коробки швидкостей верстата з обертальним головним рухом повинні бути відомі: число ступенів частоти обертання шпинделя z , знаменник геометричного ряду φ , частоти обертання шпинделя від n1 до п z і частота обертання електродвигуна п ед.
Число ступенів частоти обертання шпинделя z при налагодженні послідовно включеними груповими передачами (в многовалових коробках) дорівнює добутку числа передач у кожній групі, тобто z = р а р b pc ….pk . Наприклад, для приводу, показаного на рис. 4.1, z = р а р ъ р с = 3*2*2 = 12.
При заданому (або вибраному) числі z ступенів ряду частоти обертання шпинделя число груп передач, кількість передач в кожній групі і порядок розташування груп можна вибирати різними. Цей вибір в основному і визначає конструкцію коробки швидкостей.
Для найбільш часто вживаних значень z можуть бути використані наступні конструктивні варіанти:
z= 4 = 2*2;
z = 6 = 2*3 = 3*2;
z = 8 = 2*2*2 = 4*2 = 2*4;
z = 12 = 3*2*2 = 2*3*2 = 2*2*3 == 3*4 = 4*3;
z = 16 = 2*2*2*2 = 4*2*2 = 2*4*2 = 2*2*4 = 4*4;
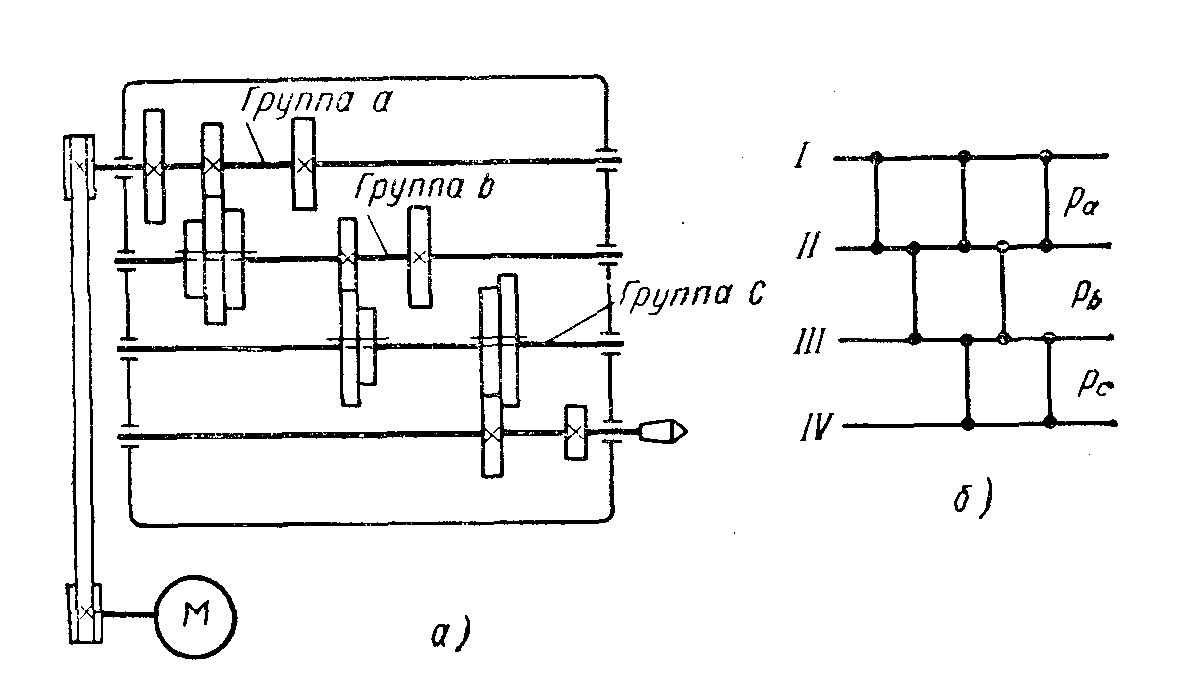
Рис. 4.1 . Схеми коробки швидкостей на 12 ступенів з послідовним включенням груп передач:
а- кінематична; б - структурна
z = 18 = 2*3*3 = 3*2*3 = 3*3*2;
z = 24 = 3*2*2*2 = 2*3*2*2 = 2*2*3*2 = 2*2*2*3 = 2*3*4 = 2*4*3 = 3 *2*4 = = 3*4*2 = 4*2*3 = 4*3*2.
У верстатах зі зміною частоти обертання шпинделя по геометричному ряду передаточні відношення передач у групах утворюють геометричний ряд із знаменником φ x , де х - ціле число, яке називають характеристикою групи. Характеристика групи дорівнює числу ступенів швидкості сукупності групових передач, кінематична попередніх цієї групи . Загальне рівняння налагодження групових передач має наступний вид:
і1:і2:і3:….ір=1:φх:φ2х:….:φ(р-1)х.
Для послідовного отримання всіх частот обертання шпинделя спочатку перемикають передачі однієї групи, потім другий і.т. д. Якщо в коробці швидкостей, що на рис. 4.1, використовувати з цією метою насамперед передачі групи а, потім групи с і в останню чергу групи б, то відповідно до цього порядку перемикання група а буде основною, група с - першою переборною, група б - другою переборною. Коробка передач може мати і більше число переборних груп.
Для основної групи передач характеристика х 0 = 1; для першої переборної групи х 1 = р1 для другої групи переборної х 2 = р1/р2 і т. д., де р1 і р 2 - відповідно числа передач основної і першої переборної групи.
Для конструктивного варіанту приводу, показаного на рис. 4.1, і прийнятого порядку перемикань швидкостей можна написати структурну формулу z = 3 (1) *2 (6) *2 (3). У формулі цифрами в дужках позначені характеристики груп. Основної і різними за номером переборними групами може бути будь-яка група передач до приводу. Тому поряд з конструктивними варіантами приводу можливі також різні його кінематичні варіанти.
Щоб уникнути надмірно великих діаметрів зубчастих коліс в коробках швидкостей, а також для нормальної їх роботи встановлені такі граничні передаточні відношення між валами при прямозубому зачепленні:  ; звідси найбільший діапазон регулювання групової передачі буде
; звідси найбільший діапазон регулювання групової передачі буде
(іmax/imin)= 
Відношення (іmax/imin) має найбільшу величину для останньої переборної групи приводу. Отже, для коробок швидкостей
(іmax/imin)=φ(р-1)хmax 
де Х m ах - найбільший показник для останньої переборної групи; р - число передач в цій групі.
Для графічного зображення частот обертання шпинделя верстата зазвичай використовують логарифмічну шкалу чисел. З цією метою геометричний ряд частот обертання
n2=n1φ;
n3= n1φ 2;
n4= n1φ 3;
……….
nz= n1φ z-1;
логарифмують:
lg n2 = lg n1 + lg φ;
lg n3 = lg n1 + 2 lg φ;
lg n 4 = lg n 1 + 3 lg φ;
…………………………
lg n z = Lg n1 + (z - 1) lg φ;
звідки
lg n 3 = Lg n 2 = lg φ;
lg n4 - lg n 3 = Lg φ;
…………………….
lg n z - lg n z-1 = Lg φ = const.

Рис. 4.2 . Кінематична схема, структурні сітки та графіки частоти обертання коробки швидкостей на шість ступенів .
Таким чином, якщо відкладати на прямій лінії послідовні значення логарифмів частот обертання п 1 , п 2, п 3, ….. п z , то інтервали між ними будуть постійними і рівні lgφ.
Розглянемо побудову структурної сітки і графіка частот обертання для коробки швидкостей, кінематична схема якої показана на рис. 4.2, а. Для прийнятого конструктивного варіанту приводу можливі два варіанти структурної формули: z= 6 = 3 (1) *2 (3) і z= 6 = 3 (2) *2 (1). У першому випадку основною групою буде перша в конструктивному відношенні група передач, а першою переборною - друга група передач; для другого випадку - навпаки.
На рис. 4.2, б і в показані структурні сітки наведених структурних формул приводу. Вони побудовані таким чином. На рівній відстані один від одного проводять вертикальні лінії, число яких повинно бути на одиницю більше, ніж число групових передач. Також проводять ряд горизонтальних паралельних прямих з інтервалом, що дорівнює lgφ (число горизонтальних прямих дорівнює числу z ступенів частоти обертання шпинделя). На середині першого зліва вертикальної лінії наносять точку О, з якої симетрично відповідно до числа передач в групах по заданій структурній формулі проводять промені, що з'єднують точки на вертикальних лініях. Відстані між сусідніми променями повинні бути рівні х і lgφ., де х і - характеристика відповідної групи.
Оптимальний варіант структурної сітки вибирають з таких міркувань. Вище зазначалося, що незалежно від порядку перемикань групових передач діапазон регулювання останньої переборної групи є найбільшим. Тому слід визначити діапазони регулювання останніх переборних груп для всіх варіантів структурних сіток (при обраному значенні φ) і виключити з подальшого розгляду варіанти, що не задовольняють умові
(іmax/imin)=φ(р-1)хmax
Для варіанта, показаного на рис. 4.2 , б, х тах = 3, а для варіанта, показаного на рис. 4.2, в, х тах = 2. Варіант, наведений на рис. 4.2, б,підходить для всіх значень φ , тому що 2 (2-1)3 =8; варіант на рис. 4.2 , в задовольняє всім значенням φ за винятком φ = 1,78 і φ = 2, оскільки 1,78(3-1)2  8 і 2 (3-1)2 8. На рис.4.2 , г і д показані побудовані для обох варіантів структурних сіток графіки частоти обертання при φ = 1,26, п 1 =160 хв-1, ,n в = 500 хв-1 і п ел = 1000 хв-1.
8 і 2 (3-1)2 8. На рис.4.2 , г і д показані побудовані для обох варіантів структурних сіток графіки частоти обертання при φ = 1,26, п 1 =160 хв-1, ,n в = 500 хв-1 і п ел = 1000 хв-1.
Графіки частоти обертання будують в такій послідовності: на рівній відстані один від одного проводять вертикальні лінії, число яких дорівнює числу валів коробки; на рівній відстані один від одного з інтервалами lgφ проводять горизонтальні лінії, яким присвоюють (знизу вгору) порядкові номери частот обертання, починаючи з n1. Промінь, проведений між вертикальними лініями, позначає передачу між двома валами з передавальним відношенням і= φт, де т - число інтервалів , перекритих променем. При горизонтальному положенні променя і = 1, при промені, направленому вгору, і> 1, а спрямованим донизу і <1.
Дата добавления: 2022-01-22; просмотров: 36; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!