Интегральный критерий качества
Каждый из рассмотренных выше прямых и косвенных показателей качества характеризует лишь одно какое-либо свойство системы, лишь один признак переходного процесса или частотной характеристики. Причем, все показатели связаны с настроечными параметрами регулятора сложными зависимостями, имеющими, как правило, противоречивый характер: изменение параметра приводит к улучшению одних показателей качества и к ухудшению других. Это обстоятельство существенно затрудняет выбор параметров регулятора. Поэтому в инженерной практике широко используются интегральные показатели или оценки качества.
Интегральные оценки представляют собой определенные интегралы по времени (в пределах от 0 до ∞) от некоторой функции управляемой переменной y (t) [или сигнала ошибки x (t)]
 .
.
Подынтегральная функция f0 выбирается таким образом, чтобы интеграл лучше характеризовал качество системы и проще выражался через коэффициенты передаточной функции замкнутой системы. Чтобы интеграл был сходящимся, в функцию f0 вводят не абсолютные значения y (t) или x (t), а их отклонения от конечных, установившихся значений.
Простейшей интегральной оценкой является линейная интегральная оценка
 ,
,
которая равна площади, заключенной между прямой y(∞) и кривой переходного процесса y(t) (рис. 5.5. а).
Эта интегральная оценка учитывает как величину динамических отклонений, так и длительность их существования. Поэтому чем меньше оценка, тем лучше качество процесса управления. Разность под знаком интеграла равна динамической или переходной составляющей сигнала ошибки
|
|
|

поэтому интегральную оценку чаще определяют в таком виде
 .
.
Этот интеграл соответствует площади под кривой переходной составляющей сигнала ошибки, вызванной изменением задающего воздействия (см. рис. 5.5.а) или возмущающего воздействия, (рис. 5.5. б). Площадь под кривой xп (t) будет тем меньше, чем быстрее заканчивается переходный процесс и чем меньше отклонения сигнала y (t) от g(t). Поэтому настроечные параметры регулятора необходимо выбирать таким образом, чтобы интегральная оценка была минимальна.
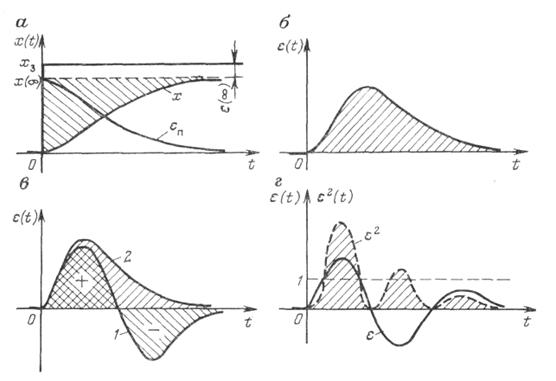
Рис. 5.5. Интегральные оценки качества
Недостатком линейной интегральной оценки является то, что ее можно применять лишь для заведомо неколебательных, апериодических переходных процессов. Интеграл, вычисленный для знакопеременной кривой 1, (рис. 5.5.в) будет существенно меньше интеграла, вычисленного для апериодической кривой 2 (хотя качество переходного процесса 2 явно лучше).
В связи с этим для колебательных переходных процессов применяют такие интегральные оценки, знакопеременность подынтегральной функции которых тем или иным способом устранена. Такой оценкой является, например, модульная интегральная оценка
|
|
|

Эту оценку можно использовать только при исследовании систем на моделях, так как их вычисление через коэффициенты передаточной функции (без нахождения xп (t) ) невозможно.
При анализе и синтезе систем регулирования с колебательными свойствами наиболее широко используется квадратичная интегральная оценка
 ,
,
которая равна площади под кривой xп2 (рис.5.5. г).
Квадратичная оценка так же, как и линейная, учитывает величину и длительность отклонений. Однако из-за возведения сигнала xп (t) в квадрат первые (большие) отклонения приобретают в конечном значении интеграла существенно больший вес, чем последующие (малые) отклонения. Поэтому минимальные значения квадратичной оценки всегда соответствуют колебательным процессам с малым затуханием.
С целью устранения этого недостатка применяют улучшенную квадратичную оценку
которая, кроме самих отклонений, учитывает с весовым коэффициентом Тв2 производную отклонений. Обычно весовой коэффициент Тв выбирают равным желаемому времени нарастания tн или принимают в пределах
|
|
|
 ,
,
где tп—желаемая длительность переходного процесса.
Порядок выполнения работы
Построить астатическую систему с единичной обратной связью из интегратора(blocks → integration → integrator) и колебательной системы (рис. 5.6).
Для оценки по интегральному критерию качества добавим в схему блоки pow (blocks → arithmetic → pow), линейную систему (blocks → linear system → tranferFunction) соединить их последовательно и вход блока pow соединить с выходом сумматора, а к выходу линейной функции подключить дисплей.
Установить время симуляции равное времени переходного процесса (рис 5.7). Построить АФЧХ (рис 5.8).
Рис 5.6.
Рис. 5.7.
Рис 5.8.
Провести несколько экспериментов для систем с различными значениями T, d и k (рис. 5.9–5.11).
Рис 5.9.
Рис. 5.10
Исследуем также звено 3 порядка (рис. 5.12).
Оценим качество переходного процесса по интегральному методу оценки (рис 5.13). Построим АФЧХ (5.14).
Поочередно поменяем значения T1, d, k ,T2 (5.15-5.18).
Дата добавления: 2018-02-18; просмотров: 1151; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!