ДЕЙСТВИЯ ВО ВТОРОЙ ЗОНЕ СТАТУИ
1) Робот продолжаёт своё движение вперёд, пока датчик освещенности, которым оснащён робот, не определит чёрную линию, перпендикулярную борту. При определении чёрной линии робот останавливается.
2) Происходит захват ступы манипулятором.
3) Подъем ступы манипулятором.
4) Сброс ступы на горку.
5) В том случае, если чёрная статуя стоит во второй зоне статуй, робот опускает, а затем снова поднимает манипулятор, захватывая чёрную статую. В противном случае робот продолжает выполнение программы без данных действий.
Примечание:После действий со ступой и статуей манипулятор не опускается. Это нужно для того, чтобы робот при последующем движении выровнялся о борт. Раскрытый манипулятор не позволяет роботу подъехать к борту до упора.
6) Робот с поднятым манипулятором продолжает движение вперёд до упора в борт (для выравнивания).
7) Поворот влево на ~ 90 градусов (Рис.15).
Рис.15. Схема движения робота во 2-й зоне статуй.
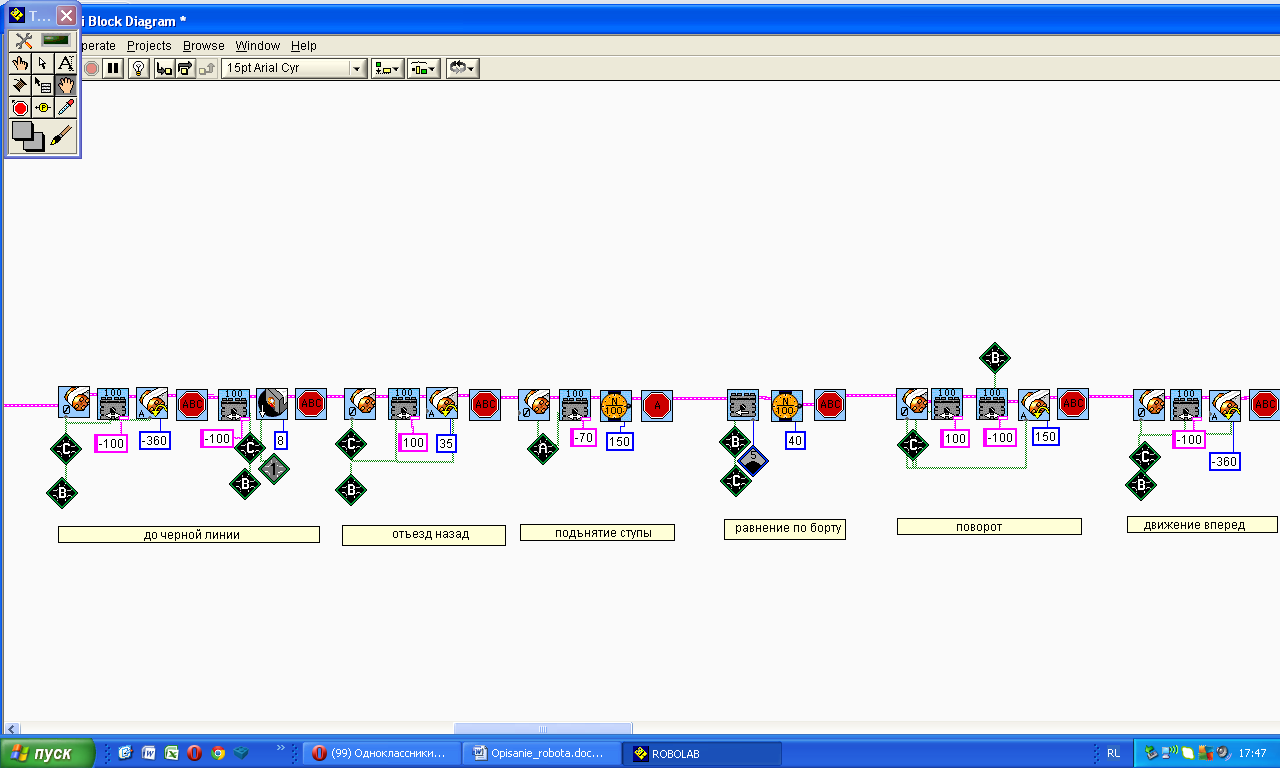
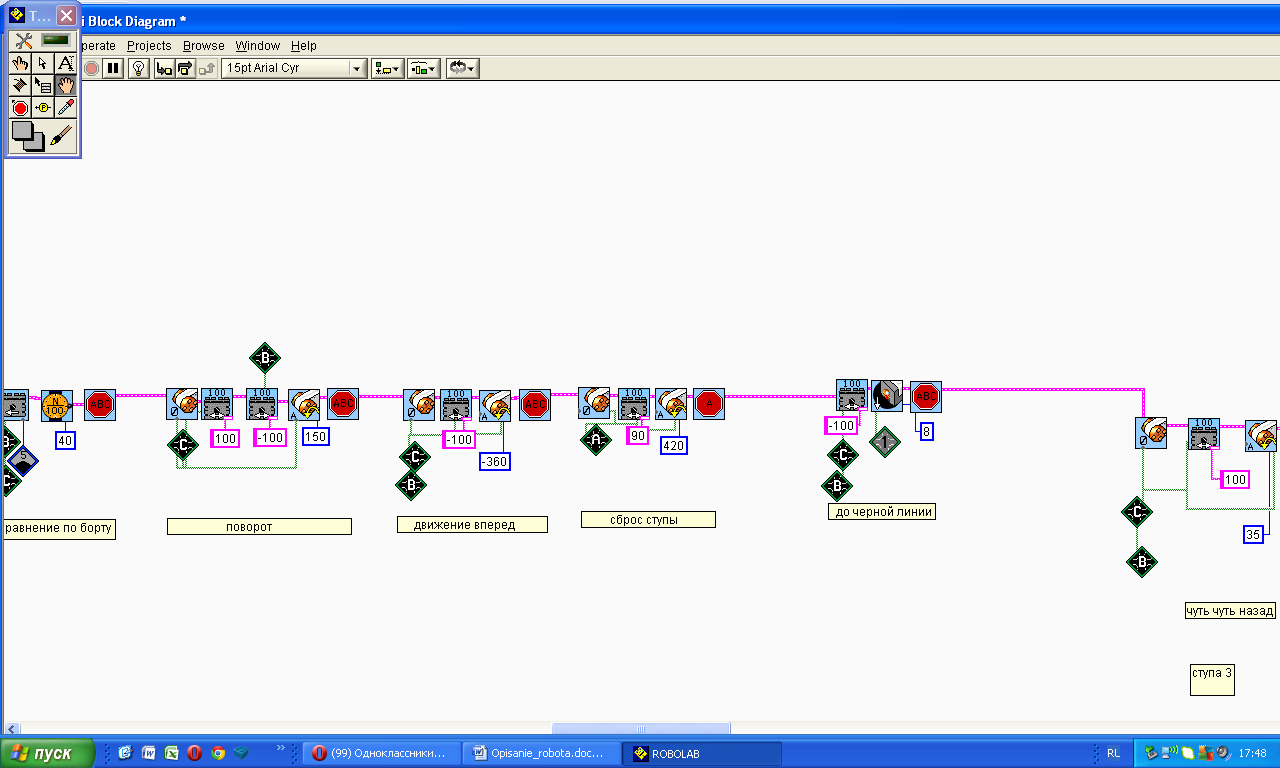
Рис.16. Блок программы работы робота в зоне преодоления рва и зоне второй статуи.
ДЕЙСТВИЯ В ТРЕТЬЕЙ ЗОНЕ СТАТУИ
1) Робот начинает своё движение вперёд, пока датчик освещенности, которым оснащён робот, не определит чёрную линию, перпендикулярную борту. Одновременно с движением робот опускает манипулятор. При определении чёрной линии робот останавливается.
Примечание:Манипулятор опускается после выполнения действия во второй зоне статуй, во время движения в зоне третьей статуи. Во время движения из манипулятора падает чёрная ступа. Данные параллельные действия нужны для экономии времени.
|
|
|
2) Захват ступы манипулятором.
3) Подъем ступы.
4) Сброс ступы на горку.
5) В том случае, если чёрная статуя находится в третьей зоне статуй, робот опускает, а затем снова поднимает манипулятор, захватывая чёрную статую. В противном случае робот продолжает выполнение программы без данных действий.
6) Робот с поднятым манипулятором продолжает движение вперёд до упора в борт (для выравнивания). (Рис.17)
7) Поворот влево на ~ 90 градусов.
8) Движение вперёд с параллельным опусканием манипулятора.
Рис.17. Схема движения робота в 3-ей зоне статуй.
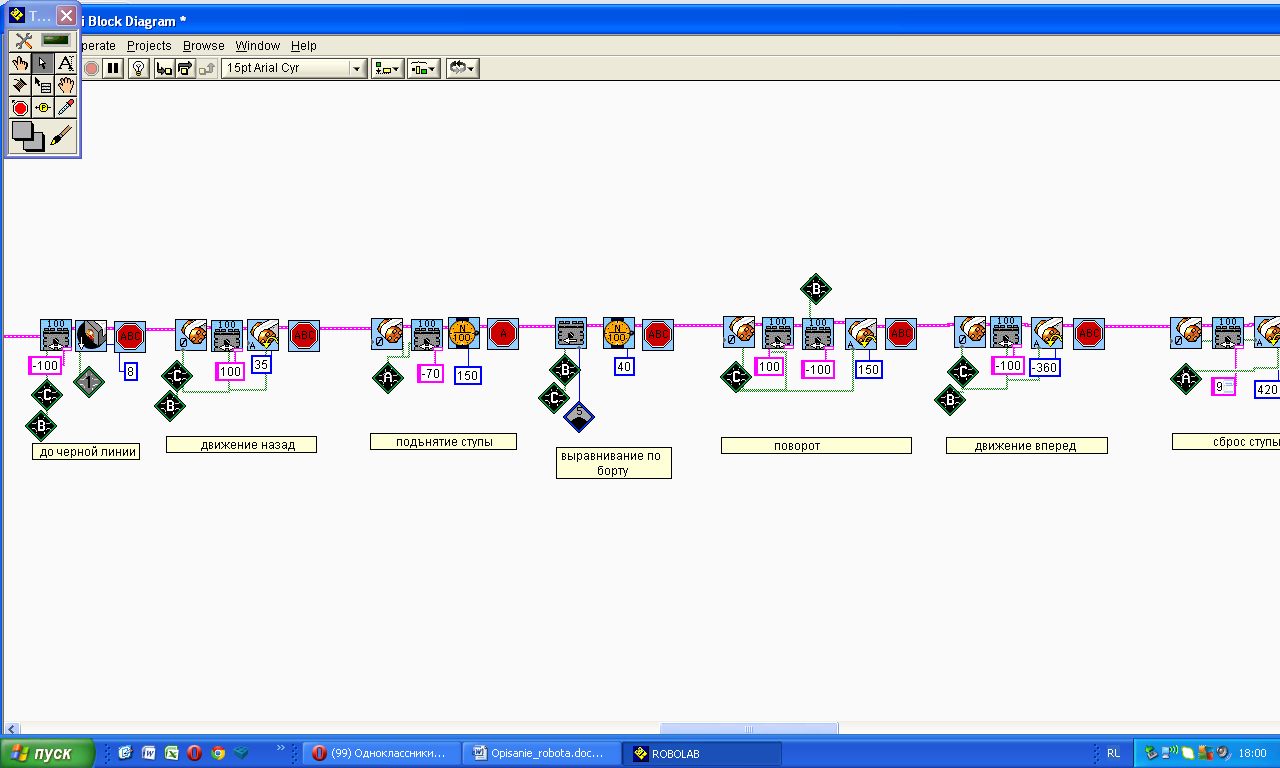
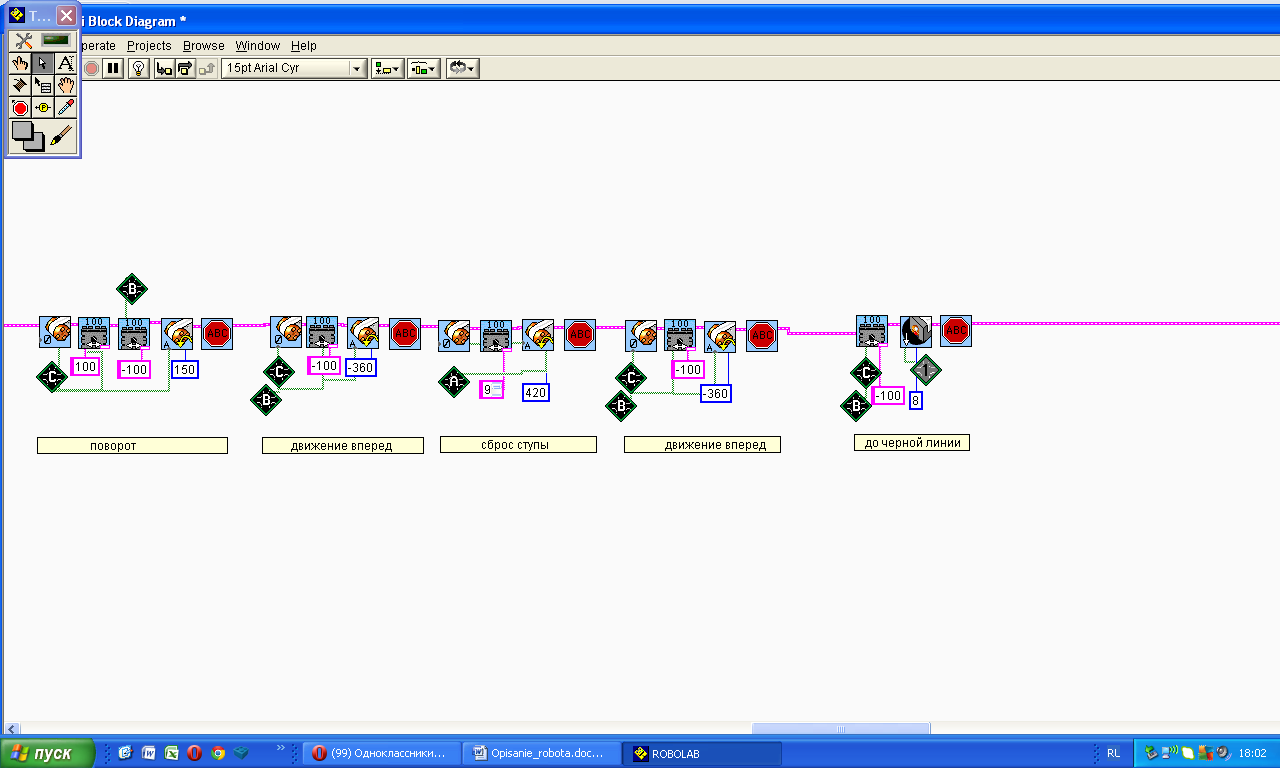
Рис.18. Блок программы работы робота в зоне преодоления рва и зоне третьей статуи.
ДЕЙСТВИЯ В ЧЕТВЕРТОЙ ЗОНЕ СТАТУИ
1) Робот начинает своё движение вперёд, пока датчик освещенности, которым оснащён робот, не определит чёрную линию, перпендикулярную борту. Одновременно с движением робот опускает манипулятор. При определении чёрной линии робот останавливается.
2) Захват ступы манипулятором.
3) Подъем ступы.
4) Сброс ступы на горку.
Примечание:В том случае, если чёрная статуя находится в четвёртой зоне статуи, после её взятия робот продолжает своё движение, неопуская манипулятор. Это позволяет сэкономить время и предотвратить случайное падение чёрной статуи на поле во время помещения в отсек для статуй.
|
|
|
5) Робот начинает свое движение вперёд до восходящих ступеней (Рис.19). Робот производит небольшой поворот налево, затем выравнивается и продолжает движение до ступени.
Дата добавления: 2018-02-18; просмотров: 368; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!