ДЕЙСТВИЯ В ПЕРВОЙ ЗОНЕ СТАТУИ
Nbsp; Команда «Гермес» Состязание «Боробудур» ОГЛАВЛЕНИЕ СОСТАВ КОМАНДЫ: 3 ЦЕЛЬ ПРОЕКТА: 3 ЗАДАЧИ ПРОЕКТА: 3 ОПИСАНИЕ ПОЛЯ: 4 КОНСТРУКЦИЯ РОБОТА: 6 АЛГОРИТМ ДЕЙСТВИЙ РОБОТА: 7 ПРЕОДОЛЕНИЕ РВА. 7 ДЕЙСТВИЯ В ПЕРВОЙ ЗОНЕ СТАТУИ. 9 ДЕЙСТВИЯ ВО ВТОРОЙ ЗОНЕ СТАТУИ. 14 ДЕЙСТВИЯ В ТРЕТЬЕЙ ЗОНЕ СТАТУИ. 16 ДЕЙСТВИЯ В ЧЕТВЕРТОЙ ЗОНЕ СТАТУИ. 18 ПРЕОДОЛЕНИЕ ВОСХОДЯЩИХ И НИСХОДЯЩИХ СТУПЕНЕЙ. 20
СОСТАВКОМАНДЫ
1) Оператор №1. Анисимов Родион. 13 лет. Ученик школы № 143 г. Красноярска, 8 «И» класса.(Участие в проекте: конструирование робота, написание и отладка программы работы робота);
2) Оператор №2. Миллер Даниил.15 лет. Ученик школы № 143 г. Красноярска, 8«И» класса.(Участие в проекте: конструирование робота, разработка инженерной книги);
3) Тренер команды.Турушев Максим Иннокентьевич.
ЦЕЛЬ ПРОЕКТА
Создать робота для выполнения задания в состязании «Боробудур» с максимальным количеством баллов за минимальное время.
ЗАДАЧИ ПРОЕКТА
Программнаячасть:
1) Изучение новых блоков языка программирования NXT-G, Robolab;
2) Рассмотрение различных алгоритмов выполнения задания;
3) Выявление наилучшего языка программированияNXT-G илиRobolabдля создания программы для робота.
Конструирование:
1) Сконструировать робота, соответствующего необходимому размеру 25х25х25см;
2) Рассмотрение различных вариантов конструкции;
3) Анализ конструкции существующих манипуляторов;
|
|
|
4) Создание и последующая доработкаконструкции робота.
ОПИСАНИЕ ПОЛЯ:
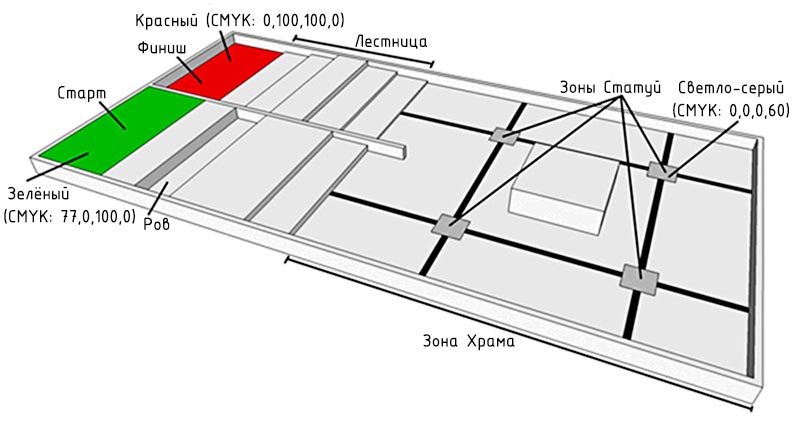
Рис.1. Схема поля для соревнований.
1) Внутренние размеры поля составляют 2400 мм × 1200 ммРис.1.
2) Поле окружено ограничивающими бортами шириной 16-20 ммРис.1.
Примечание:Мы решили, использовать бортики для выравнивания робота (см. СПУСК ПО СТУПЕНЯМ).
3) На поле имеются черные линии. Ширина чёрной линии на поверхности игрового поля составляет 20 мм ± 1 мм. Мы используем чёрную линию для того, чтобы останавливаться перед серыми зонами статуй с помощью датчика цветаРис.1.
4) Основной цвет поверхности стола – белый, за исключением чёрных линий, серых квадратов, зонстарта ифиниша. На игровом столе имеются: пониженный участок (Ров) глубиной 50 мм, а также две серии восходящих и нисходящих ступеней (6 ступеней, все разной высоты) Рис.1.
Примечание:Наш робот преодолевает ров с помощью опрокидывающегося моста(см. ПРЕОДОЛЕНИЕ РВА).
Размеры квадратного возвышения: 300 х 300 мм и 100 мм в высоту.Квадратное возвышение окружено четырьмя серыми квадратами (100 х 100 мм) - зонами статуй, в которых внутри ступ установлены три серых и одна черная статуи (Рис.2).
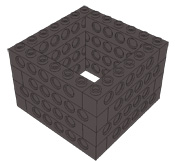
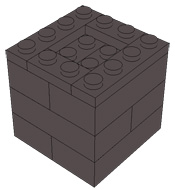
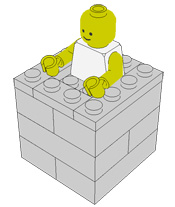
Ступа Черная статуяСерая статуя
Рис.2. Ступа и статуи.
|
|
|
КОНСТРУКЦИЯ РОБОТА
Ходовая часть.
Ходовая часть робота состоит из двух моторов, подсоединённых к портам B и C, и двух пар больших колёс, а также на передней части робота имеются два маленьких опорных колеса (Рис. 5).
Каркас.
С правой стороны робота расположена стенка с колёсами, с помощью которой происходит выравнивание робота по стенке (Рис. 7).
Спереди робота расположены пазы для установки моста (Рис.5.).
Снизу робота расположен датчик освещённости, используемый нами для остановки робота на чёрной линии (Рис. 8).
Манипулятор.
Наверху робота расположен манипулятор. Для работы манипулятора используется один мотор. Благодаря шестерёнкам осуществляется захват ступы и дальнейший подъём манипулятора (Рис. 9, Рис.10).
Горка и отсек для чёрной статуи.
Наверху робота, сзади манипулятора расположена горка для ступ и отсек для статуй. Ступы, опрокидываемые манипулятором, скатываются по горке за пределы поля (Рис.11), а черная статуя через отверстие в горке падает в отсек для статуй, что позволяет зафиксировать её (Рис.12).
ПРЕОДОЛЕНИЕ
РВА
ЗОНА СТАТУЙ №1
ЗОНА СТАТУЙ №2
ЗОНА СТАТУЙ №3
ЗОНА СТАТУЙ №4
АЛГОРИТМ ДЕЙСТВИЙ РОБОТА: ВОСХОДЯЩИЕ И НИСХОДЯЩИЕ СТУПЕНИ
|
|
|
Рис.3. Разделение поля на зоны (преодоление рва, зона статуй №1,2,3,4, восходящие и нисходящие ступени).
ПРЕОДОЛЕНИЕ РВА
1) Для переезда рва мы решили использовать вспомогательную конструкцию (мост),снабженную колесами для установки мостанад рвом (Рис.4).

Рис.4. Вспомогательная конструкция (мост).
2) Мост установлен в специальные пазы на передней части робота (Рис.5).
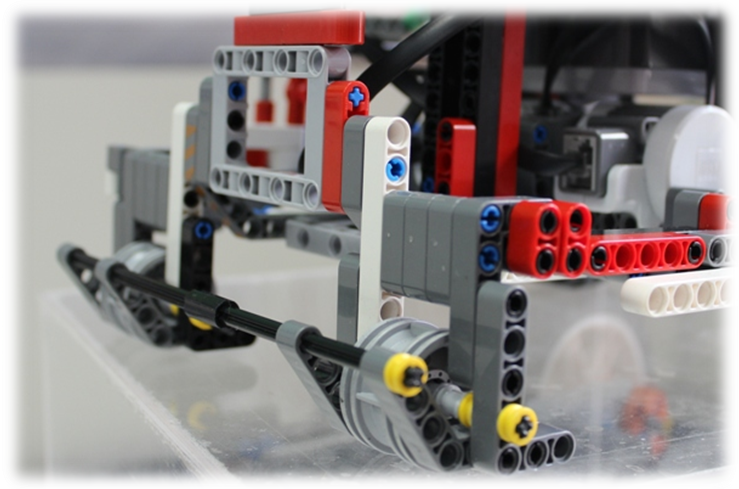
Рис.5. Пазы на роботе.
3) Робот начинает движение в сторону рва.
4) Проехав ___ градусов, робот резко отъезжает назад, благодаря чему мост падает, устанавливаясь надо рвом.
5) Робот ожидает установки моста. Затем продолжается движение вперед через ров по мосту (Рис.6).
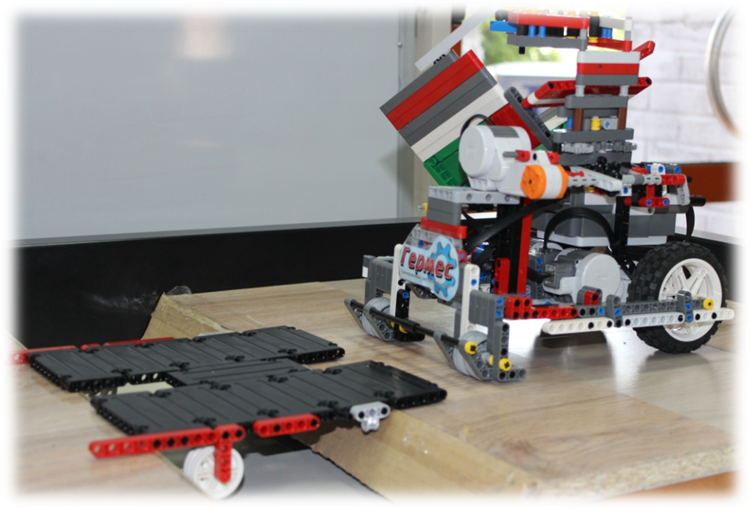
Рис.6. Установка моста надо рвом.
ДЕЙСТВИЯ В ПЕРВОЙ ЗОНЕ СТАТУИ
1) После преодоления моста, робот продолжает двигаться вперед по прямой, преодолевая нисходящие ступени.Скорость движения меньше, чем в других зонах, это нужно для того, чтобы робот не сбился с траектории движения. Одновременно с движением опускается манипулятор.
2) Робот двигается с небольшим поворотом вправо, до упора в борт. Это нужно для выравнивания робота по борту.
Примечание: Выравнивание происходит при помощи стенки с колёсами, установленной с правой стороны робота. (Рис.7)
|
|
|
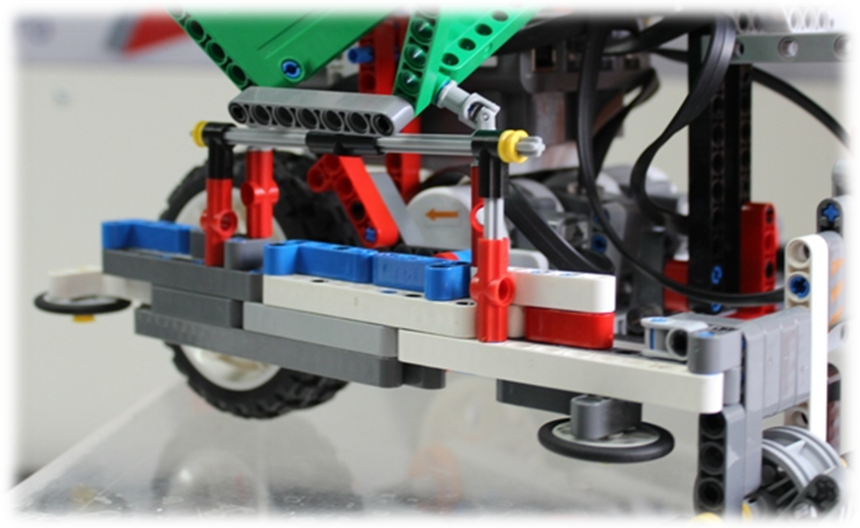
Рис.7. Стенка с колесами.
3) Робот продолжаёт своё движение вперёд, пока датчик освещенности, которым оснащён робот (Рис.8), не определит чёрную линию, перпендикулярную борту. При определении чёрной линии робот останавливается.
| Датчик освещенности |
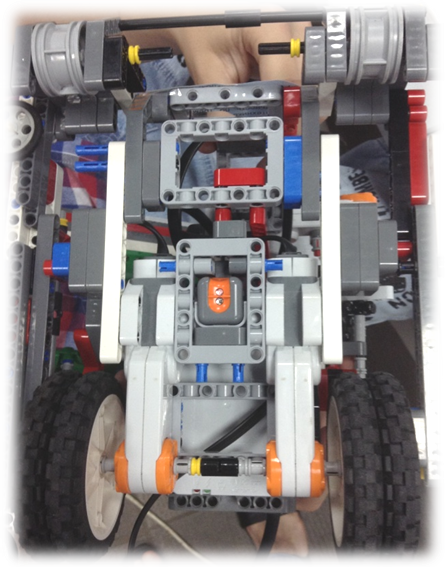
Рис.8. Схема расположения датчика освещенности
4) Захват ступы манипулятором(Рис.9.).
| Захват ступы |

Рис.9. Захват ступы манипулятором
5) Подъем ступы(Рис.10).
| Подъем ступы |
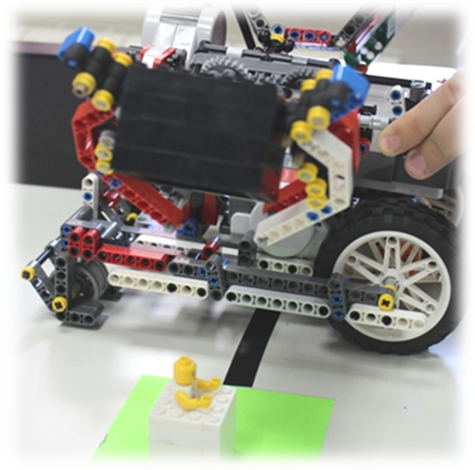
Рис.10. Подъем ступы манипулятором.
6) Сброс ступы. Опускание манипулятора, при котором чёрная ступа падает на предусмотренную сверху робота горку и скатывается за пределы поля. Благодаря горке ступа не может упасть перед роботом, что помешало бы его движению (Рис.11).
| Сброс ступы |
| Падение ступы |

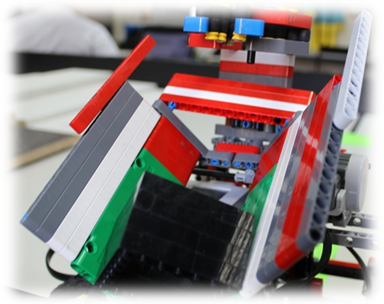
Рис.11. Падение ступы за пределы поля (вид сзади).
7) В том случае, если чёрная статуя находится в первой зоне статуй, робот снова поднимает манипулятор, захватывая чёрную статую. Затем манипулятор опускается, и чёрная статуя падает в отсек для статуи через предусмотренное в горке отверстие (Рис.12). В противном случае робот продолжает выполнение программы без данных действий.
| Статуя в отсеке для статуй |
| Сброс статуи |
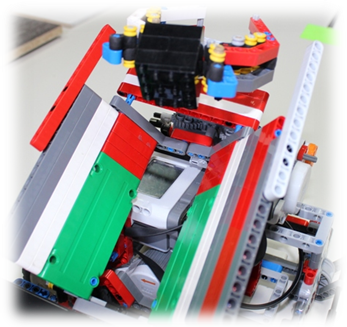
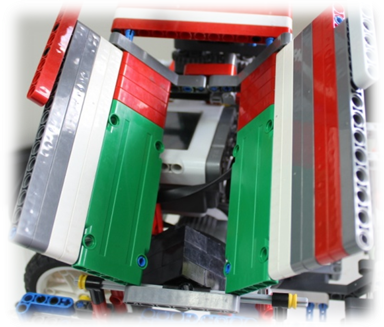
Рис.12. Падение черной статуи в отсек для статуи (вид сбоку со стороны борта)
Примечание: Сначала мы решили написать универсальную программу с циклом, где датчикосвещенности, закреплённый на манипуляторе определялзначение цвета статуи, и в том случае если статуя чёрная осуществлял её захват и подъем. Но при работе с роботом мы столкнулись со следующей проблемой: датчик освещенности не мог точно определить значение цвета и постоянно брал серые статуи. По этой причине мы приняли решение использовать 4 разных программы для подъёма чёрной статуи в разных зонах запуская нужную программу в начале попытки.
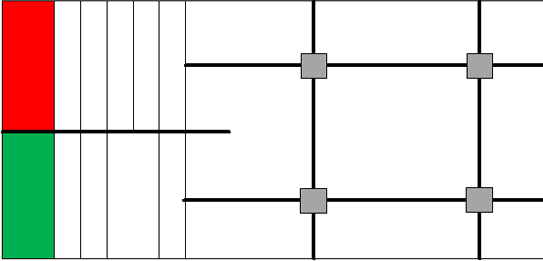
Рис.13. Схема движения робота в 1-й зоне статуй.
Блок программы, отвечающий за действие робота в зоне преодоления рва и зоне первой статуи (Рис. 14).
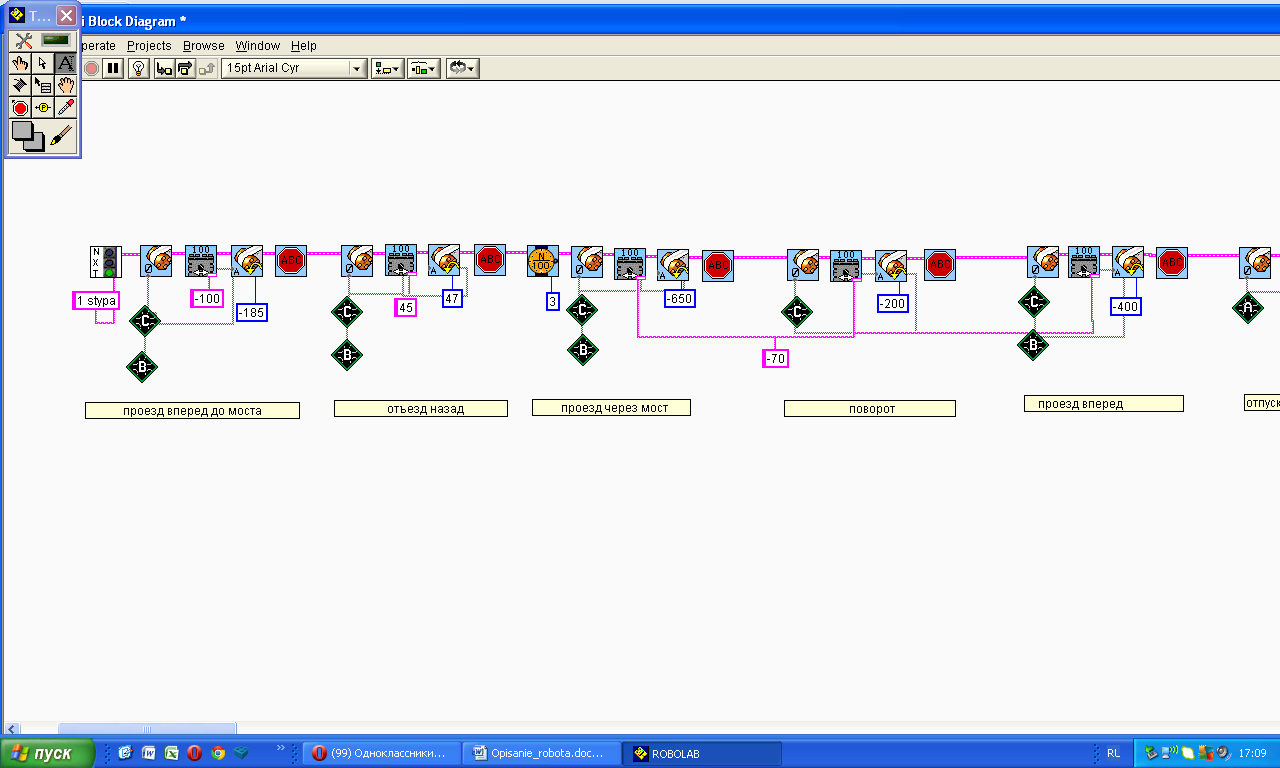
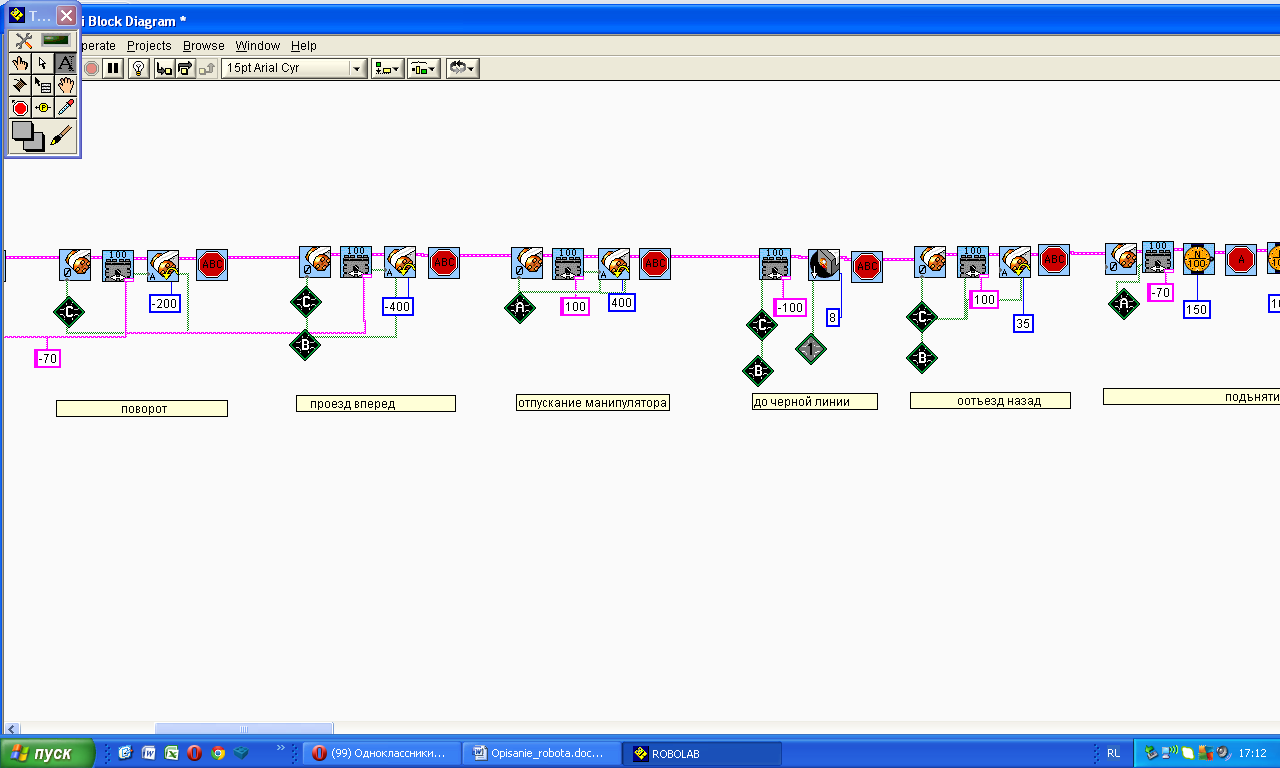
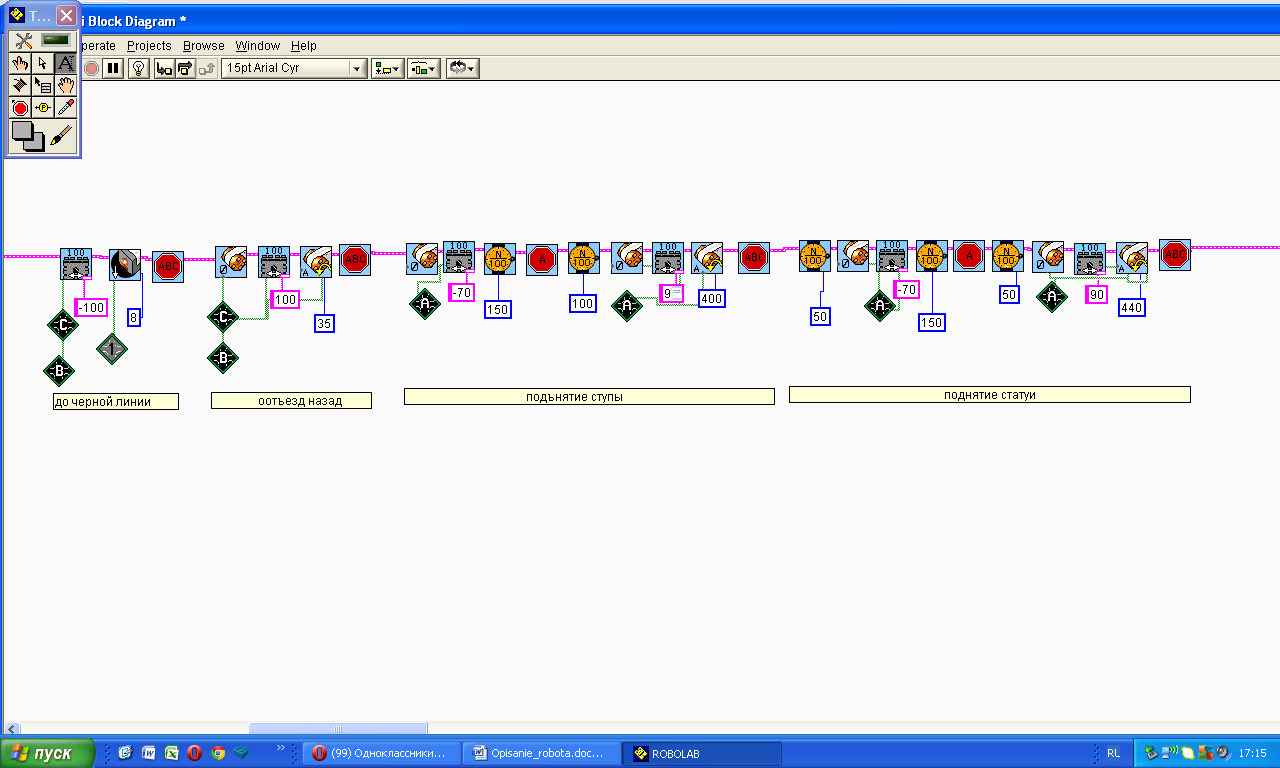
Рис.14. Блок программы работы робота в зоне преодоления рва и зоне первой статуи.
Дата добавления: 2018-02-18; просмотров: 322; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!