Передаточная функция системы по задающему и возмущающему воздействию. Уравнение динамики АСУ.
Структурная схема типовой одноконтурной системы управления по задающему воздействию:
Где:
 – передаточная функция объекта;
– передаточная функция объекта;
 – передаточная функция регулятора.
– передаточная функция регулятора.
Передаточная функция типовой одноконтурной системы управления по задающему воздействию найдем по выражению:
Используя систему Octave пакета Control.
wp=tf([2 1],[3 1 0])
Transfer function 'wp' from input 'u1' to output ...
2 s + 1
y1: ---------
3 s^2 + s
Continuous-time model.
wo=tf([4.5 1.545 13.515 4.5],[0.03 3.011 1.24 18.084 6.65 27.158 9.6])
Transfer function 'wo' from input 'u1' to output ...
4.5 s^3 + 1.545 s^2 + 13.52 s + 4.5
y1: ----------------------------------------------------------------------
0.03 s^6 + 3.011 s^5 + 1.24 s^4 + 18.08 s^3 + 6.65 s^2 + 27.16 s + 9.6
Continuous-time model.
wzv=feedback(wo*wp)
Transfer function 'wzv' from input 'u1' to output ...
9 s^4 + 7.59 s^3 + 28.58 s^2 + 22.52 s + 4.5
y1: ------------------------------------------------------------------------------------------------
0.09 s^8 + 9.063 s^7 + 6.731 s^6 + 55.49 s^5 + 47.03 s^4 + 95.71 s^3 + 84.53 s^2 + 32.12 s + 4.5
Continuous-time model.

Структурная схема типовой одноконтурной системы управления по возмущающему воздействию:
Передаточная функция типовой одноконтурной системы управления по возмущающему воздействию найдем по выражению:
woc=wo*wp
Transfer function 'woc' from input 'u1' to output ...
9 s^4 + 7.59 s^3 + 28.58 s^2 + 22.52 s + 4.5
y1: ----------------------------------------------------------------------------------------
0.09 s^8 + 9.063 s^7 + 6.731 s^6 + 55.49 s^5 + 38.03 s^4 + 88.12 s^3 + 55.96 s^2 + 9.6 s
Continuous-time model.
wvv=feedback(1,woc)
|
|
|
Transfer function 'wvv' from input 'u1' to output ...
0.09 s^8 + 9.063 s^7 + 6.731 s^6 + 55.49 s^5 + 38.03 s^4 + 88.12 s^3 + 55.96 s^2 + 9.6 s
y1: ------------------------------------------------------------------------------------------------
0.09 s^8 + 9.063 s^7 + 6.731 s^6 + 55.49 s^5 + 47.03 s^4 + 95.71 s^3 + 84.53 s^2 + 32.12 s + 4.5
Continuous-time model.

Уравнение динамики АСУ:


Исследование объекта управления на устойчивость алгебраическими и частотными методами, определение запас устойчивости.
Проверим систему на устойчивость по критериям Гурвица, для этого характеристическое уравнение САУ запишем в виде:
 ,
,
где 
В соответствии с критерием Гурвица замкнутая САУ будет устойчива, если при  все определители Гурвица, составленные по коэффициентам характеристического уравнения САУ, будут больше нуля –
все определители Гурвица, составленные по коэффициентам характеристического уравнения САУ, будут больше нуля –  .
.
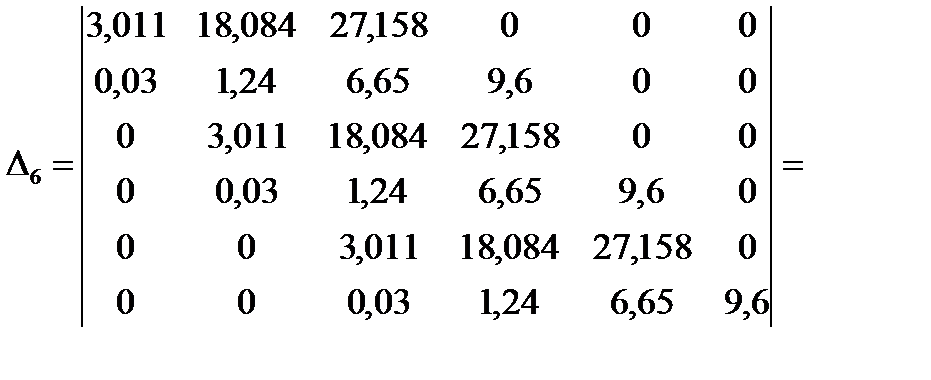
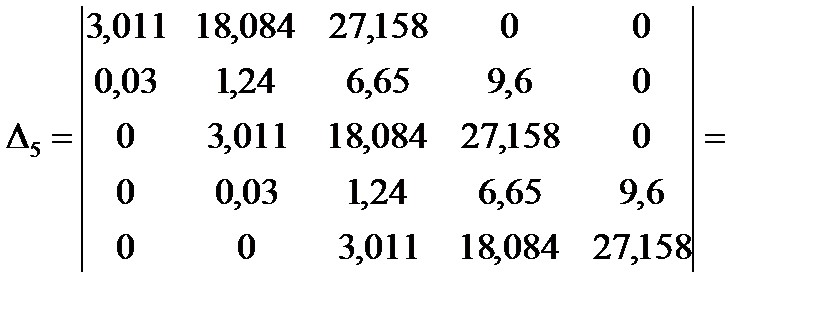
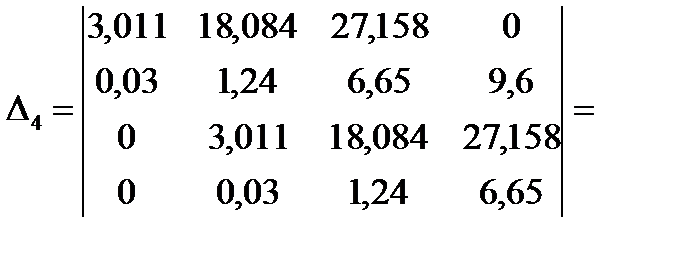
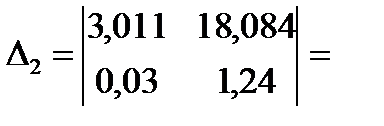
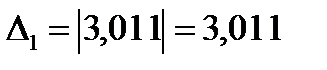
Получим главный определить (определитель третьего порядка) и другие определители Гурвица как:
 -8.0255e-04
-8.0255e-04
 -8.3599e-05
-8.3599e-05
 -0.42605
-0.42605
 -0.12831
-0.12831
 3.1911
3.1911

Т.к. не все определители матрицы Гурвица больше нуля, то система неустойчива.
Проверим систему на устойчивость по годографу Михайлова, для этого воспользуемся пакетом прикладных программ Octave.
v=0:1:20;
w=0.03*(i*v).^6+3.011*(i*v).^5+1.24*(i*v).^4+18.084*(i*v).^3+6.65*(i*v).^2
+27.158*(i*v)+9.6;
P=real(w);
Q=imag(w);
|
|
|
plot(P,Q)

Рисунок 3 – Годограф Михайлова
Годограф Михайлова не поворачивается на 360 градусов( w=∞) => система неустойчива.
Для критерия Михайлова запасом устойчивости является удаленность годографа D(jω) от начала координат, годограф проходит близко от начала координат, т.е. запас устойчивости есть, но очень маленький.
Определение устойчивости объекта управления разными способами дало одинаковый результат (система неустойчива с крайне малым запасом устойчивости)
ЗАКЛЮЧЕНИЕ
Умение разделять САУ на основные функциональные элементы и составлять функциональные и структурные схемы способствует ясности представлений о физических процессах, происходящих в системе, и имеет большое значение для дальнейшего исследования и расчета систем. Целью курсовой работы по дисциплине «Теория автоматического управления» является закрепление теоретических знаний и овладение навыками анализа и синтеза систем автоматического управления объектами на примере металлорежущих станков и промышленных роботов. При выполнении курсовой работы приобретается опыт разработки и расчета САУ производственными процессами и отдельными объектами в машиностроении.
В ходе выполнения курсовой работы были закреплены навыки по приведению сложных структурных схем к типовым одноконтурным системам автоматического управления. Были получены описания объекта управления через нули, полюса и коэффициенты усиления системы и с помощью матрицы пространства состояния. Используя частотный и алгебраический методы, убедились в устойчивости данного объекта управления.
|
|
|
При выполнении курсовой работы активно применялась система для математических вычислений Octave, что значительно ускорило и упростило вычисления.
Дата добавления: 2021-04-24; просмотров: 156; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!