Приведение исходной структурной схемы к типовой одноконтурной системе автоматического управления
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательноеучреждение высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Электроэнергетики и электротехники»
Допускаю к защите _____________
Руководитель: Д.О. Герасимов
Ф.И.О
АНАЛИЗ И СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту по дисциплине
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1.002.00.00 ПЗ
Выполнил студент группы ЭПб – 15 – 1 _________ Быргазов М. А.
шифр подпись Ф.И.О
Нормоконтроль _________ Д.О. Герасимов
подпись Ф.И.О
Курсовой проект защищен с оценкой ____________________________
Иркутск 2017 г.
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
|
|
|
УТВЕРЖДАЮ
Зав. кафедрой
__________________
«___»___________2017г.
ЗАДАНИЕ
НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По курсу Теория автоматического управления
Студенту
Тема проекта Анализ и синтез системы автоматического управления
Вариант 2.
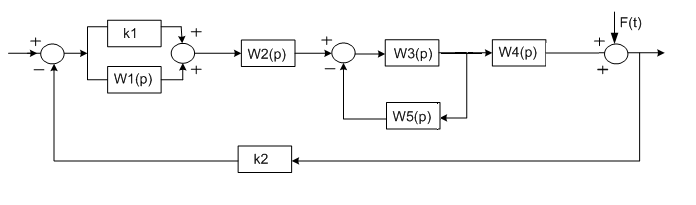
Исходные данные
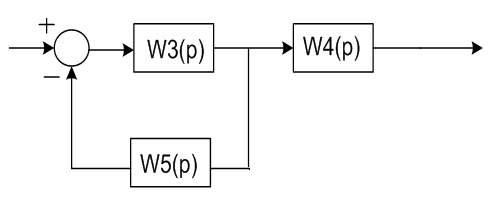
Рисунок 1. Структурная схема системы автоматического управления
Передаточные функции:
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 
Возмущающее воздействие  .
.
Показатели качества регулирования:
 ,
,  ,
,  .
.
ЗАДАНИЕ
1. Привести исходную структурную схему к типовой одноконтурной системе автоматического управления.
2. По полученной передаточной функции объекта управлениязаписать:
2.1. линейное дифференциальное уравнение объекта управления и привести его к стандартной формезаписи;
2.2. получить описание объекта управления через нули полюса и коэффициенты усилениясистемы;
2.3. получить описание объекта управления в форме матрицы пространства состояния.
3. Найти передаточную функцию системы по задающему и возмущающему воздействию. Записать уравнение динамикиАСУ.
|
|
|
4. Исследоватьобъектуправлениянаустойчивостьалгебраическимиичастотными методами, определить запасустойчивости.
5. Выбрать закон управления и произвести расчет настроечных параметров регулятора по заданным параметрам качествауправления.
Рекомендуемая литература:
1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон.опт. диск (CD- ROM).
2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон.опт. диск (CD- ROM).
3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26c.
Дата выдачи задания «» 2017 г.
Дата представления проекта руководителю «» 2017 г. Руководитель курсового проектирования Герасимов Д. О.
|
|
|
СОДЕРЖАНИЕ
ВВЕДЕНИЕ.. 5
Приведение исходной структурной схемы к типовой одноконтурной системе автоматического управления. 6
Линейное дифференциальное уравнение объекта управления в стандартной форме записи. Описание объекта управления через нули, полюса и коэффициенты системы и в форме матрицы пространства состояния. 8
Передаточная функция системы по задающему и возмущающему воздействию. Уравнение динамики АСУ. 14
Исследование объекта управления на устойчивость алгебраическими и частотными методами, определение запас устойчивости. 17
ЗАКЛЮЧЕНИЕ.. 19
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 20
ВВЕДЕНИЕ
Теория автоматического управления — научная дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Регулирование считают простейшей разновидностью управления. Автоматическим регулированием называют поддержание постоянной некоторой заданной величины, характеризующей процесс, или изменение ее по заданному закону, осуществляемое с помощью измерения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта. Управление охватывает больший круг задач. Под автоматическим управлением понимают автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
|
|
|
В ТАУ ключевым является понятие модели – определенной математической абстракции, описывающей процесс управления любой природы. Задачи анализа и синтеза САУ решаются методом математического моделирования. Математическое описание объекта управления, функциональных блоков САУ позволяет прогнозировать поведение объекта, возможность достижения поставленных целей управления при различных внешних условиях.
Приведение исходной структурной схемы к типовой одноконтурной системе автоматического управления
Типовая одноконтурная система автоматического управления:
Структурная схема регулятора:
W6 (p)= k1+W1(p)=2 +  =
= 
Wp (p) = W6(p)· W2(p) =  ·
·  =
=  ·
·
| 2 p+1 3 p2 +p |
Структурная схема объекта:

 =
= 

|
Типовая одноконтурная схема:
Линейное дифференциальное уравнение объекта управления в стандартной форме записи. Описание объекта управления через нули, полюса и коэффициенты системы и в форме матрицы пространства состояния.
Передаточная функция объекта управления:

Линейное дифференциальное уравнение объекта управления:

Приводим дифференциальное уравнение к стандартной форме записи:
Стандартная форма записи дифференциального уравнения:

Передаточная функция объекта управления по стандартной форме записи дифференциального уравнения:

Корректность преобразований верифицируем сравнением результатов реакции передаточных функций объекта управления на единичное ступенчатое воздействие.
wo1=tf([4.5 1.545 13.515 4.5],[0.03 3.011 1.24 18.084 6.65 27.158 9.6])
Transfer function 'wo1' from input 'u1' to output ...
4.5 s^3 + 1.545 s^2 + 13.52 s + 4.5
y1: ----------------------------------------------------------------------
0.03 s^6 + 3.011 s^5 + 1.24 s^4 + 18.08 s^3 + 6.65 s^2 + 27.16 s + 9.6
Continuous-time model.
wo2=tf([0.4688 0.3433 3.003 0.4688],[0.0031 0.3136 0.1292 1.8838 0.6927 2.828 1])
Transfer function 'wo2' from input 'u1' to output ...
0.4688 s^3 + 0.3433 s^2 + 3.003 s + 0.4688
y1: ---------------------------------------------------------------------------
0.0031 s^6 + 0.3136 s^5 + 0.1292 s^4 + 1.884 s^3 + 0.6927 s^2 + 2.828 s + 1
Continuous-time model.
step(wo1)
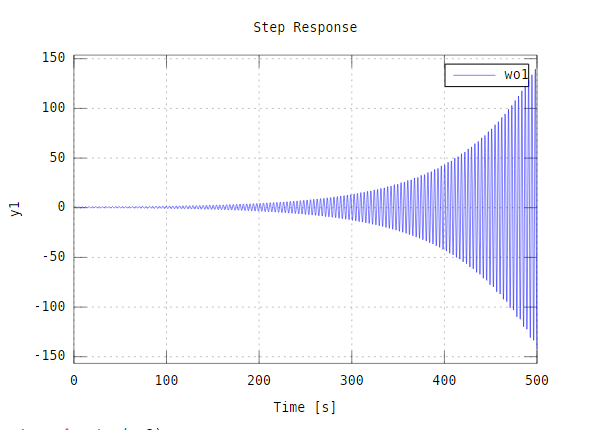
Рисунок 1 – Результат реакции передаточной функции объекта управления на единичное ступенчатое воздействие
step(wo2)
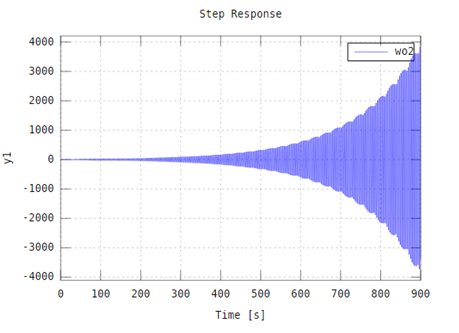
Рисунок 2 – Результат реакции передаточной функции объекта управления в стандартной форме записи на единичное ступенчатое воздействие
Анализ полученных графиков показал полное совпадение переходных характеристик, следовательно, преобразования выполнены корректно.
Математическое описание объекта управления через нули полюса и коэффициенты усиления системы.
Передаточная функция объекта управления:
В числителе и знаменателе передаточной функции записаны полиномы. Корни знаменателя называются полюсами, корни числителя – нулями. В общем виде математическое описание объекта управления через нули, полюса и коэффициенты усиления системы имеет вид:

Коэффициент усиления системы 
Корни числителя и знаменателя найдём, используя систему Octave пакета Control.
wo1=tf([4.5 1.545 13.515 4.5],[0.03 3.011 1.24 18.084 6.65 27.158 9.6])
pole(wo1)
ans =
-100.01344 + 0.00000i
0.01194 + 1.73413i
0.01194 - 1.73413i
-0.01121 + 1.73191i
-0.01121 - 1.73191i
-0.35468 + 0.00000i
zero(wo1)
ans =
-0.00500 + 1.73204i
-0.00500 - 1.73204i
-0.33333 + 0.00000i

Математическое описание объекта управления в виде модели пространства состояния.
Уравнение состояния – система дифференциальных уравнений, записанных в нормальной форме Коши.

Где:
u(t) – вектор состояния;
x(t), y(t) – векторы входа и выхода системы;
A –матрица коэффициентов;
B –матрица управления;
C –матрица выхода;
D –матрица, характеризующая связь входного сигнала с выходным.
Сущность данной формы представления заключается в том, что дифференциальное уравнение n–го порядка записывается в виде системы дифференциальных уравнений первого порядка. Процедура преобразования дифференциального уравнения n–го порядка в векторно–матричное уравнение, состоящее из n дифференциальных уравнений первого порядка, осуществляется путем введения дополнительных переменных. Эти дополнительные переменные называются переменными состояния системы, объекта.
a=[0.03 3.011 1.24 18.084 6.65 27.158 9.6];
b=[0 0 0 4.5 1.545 13.515 4.5];
[A,B,C,D]=tf2ss(a,b)
A =
0.00000 0.00000 1.00000 0.00000 0.00000 0.00000 0.00000
-1.00000 0.00000 -3.00333 0.00000 0.00000 0.00000 0.00000
0.00000 1.00000 -0.34333 0.00000 0.00000 0.00000 0.00000
0.00000 0.00000 0.00000 1.00000 -0.00000 -0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 1.00000 0.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 1.00000 0.00000
0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 1.00000
B =
-0.59919
0.00589
0.19964
2.10858
0.00000
0.00000
0.00000
C = 0.00000 0.00000 0.22222 -0.94859 0.01097 -0.31632 -0.00000
D = 0
Дата добавления: 2021-04-24; просмотров: 286; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!